ROS介绍
ROS介绍
一.ROS简介
1.ROS操作系统
机器人操作系统(ROS)是一种用于编写机器人软件的灵活框架。 它是工具,库和协议的集合,旨在简化各种机器人平台上,去构建复杂而强大的机器人。
ROS 是 Robot Operating System的简写,翻译过来就是机器人操作系统。它是一个软件框架,目的是提供开发平台,工具及生态给开发人员,让开发人员快速的去开发强大的机器人系统。
2.ROS软件结构组成

ROS Master
- 管理Node节点间进行通讯的
- 每个Node节点都需要到Ros Master中进行通讯
通roscore命令可以启动ROS Master,启动节点前,必须启动ROS Master。
# 启动ROS Master
roscore
ROS Node
- 具备单一功能的可执行程序
- 可以单独编译,可执行,可管理
- 存放在package中
3.ROS的设计哲学
1. Peer to peer
点对点的设计。
- Node节点单元
- 采用了分布式网络结构
- 节点间通过RPC + TCP/UDP进行通讯
2. Distributed
分散协同式布局。可以将ROS同时部署到多台机器上,让多台机器进行通讯。
3. Multi-lingual
多编程语言的支持。
- 可以采用python,c++,lisp等语言进行开发。
- 遵循协议进行编码,和编程语言无关
4. Light-weight
组件工具包丰富。ros提供了丰富的开发工具包。
5. Free and open-source
免费并且开源。
-
BSD许可。可修改,可复用,可商用。
-
开源使软件进步
4.工作目录说明

-
workspace: 工作空间
-
build:ros编译打包的结果产出目录。我们不需要对这个文件夹做任何编辑操作,属于自动生成。
-
devel: 开发所需要的目录
-
src:存放package的目录
-
CMakeLists.txt: 整个工作空间编译的脚本。此文件我们通常不用去做修改操作。
工作单元package
一个项目中可以创建多个工作单元,这个工作单元,我们称之为package。
package的文件组成结构为以下:

- pkg1: package的名称,开发过程中根据自己实际情况进行创建设定。
- CMakeLists.txt: 当前package的编译脚本。通常需要为c++代码添加编译时的依赖,执行等操作。
- package.xml: package相关信息。通常添加一些ros库的支持
- include文件夹: 存放c++ 头文件的
- config文件夹:存放参数配置文件,格式为yaml
- launch文件夹:存放.launch文件的。
- src:c++源代码
- scripts:python源代码
- srv:存放定义的service
- msg: 存放自定义的消息协议
- action: 存放自定义的action
4.第一个ROS程序
创建流程
1. 新建工作空间目录结构
mkdir -p first_ws/src
创建一个first_ws的工作空间,并且在其中创建了src目录
first_ws就是工作空间的名称
2. 编译工作空间
cd first_ws
catkin_make
来到创建的工作空间目录下,调用ros的命令catkin_make,将工作空间进行编译。
编译后,会得到工作空间的文件结构,build,devel,CMakeLists.txt都会自动生成。
catkin_make是ROS的编译工具,我们会经常用到。
创建package流程
来到workspace的src目录下
cd first_ws/src
2. 通过catkin创建package
catkin_create_pkg demo_cpp roscpp rospy rosmsg
catkin_create_pkg是创建package的命令。运行以上命令,会新建好package的目录,并且在目录中创建CMakeLists.txt,package.xml,src,include等文件和目录
第一个参数demo_cpp是指创建的package名称,可以根据自己的实际需求去设定。
后面的参数roscpp,rospy,rosmsg是指当前创建的这个package需要提供哪些环境依赖。
roscpp是对c++的一种依赖,有了它就可以用c++开发ros程序。
rospy是对python的一种依赖,有了它就可以用python开发ros程序。
rosmsg是Node间通讯的消息协议依赖,有了它就可以让节点间进行消息通讯。
使用Clion开发package
1. 启动clion
开启命令行工具,来到工作空间目录下,设置开发环境。
cd first_ws
source devel/setup.bash
此操作非常重要。devel目录中的setup.bash是用于开发环境中,方便找到开发依赖的。
来到clion的安装目录下,通过命令启动clion
cd ~/clion/bin
./clion.sh
笔者的clion安装目录在~/clion,大家根据实际情况,来到自己clion的安装目录,并且进入到bin目录,因为启动文件在bin目录下。
2. 使用clion打开package

clion启动后,首先点击open,然后找到工作空间,在工作空间的src中找到要打开的package,在package中找到CMakeLists.txt,选中双击,此时点击open as project就可以打开package做开发了。
3.cpp版本的helloworld
#include
#include "ros/ros.h"
using namespace std;
int main(int argc, char **argv) {
//初始化ros,并且设置节点名称
ros::init(argc, argv, "cpphello");
//创建节点
ros::NodeHandle node;
cout << "hello ros cpp" << endl;
return 0;
}
4.python版本的helloworld
#!/usr/bin/env python
# coding:utf-8
import rospy
if __name__ == '__main__':
# 创建节点
rospy.init_node("pyhello")
print("hello ros python")
5.常规API
阻塞线程spin
可以阻塞当前的线程。
-
C++对应API
ros::spin(); -
Python对应API
rospy.spin()
频率操作Rate
可以按照一定的频率操作循环执行。
-
C++对应API
ros::Rate rate(10); while(true) { rate.sleep(); } -
Python对应API
rate = rospy.Rate(10) while True: rate.sleep()
rate中的参数10,代表在while循环中,每秒钟运行10次。
节点状态判断
可以判断当前节点是否停止
可以按照一定的频率操作循环执行。
-
C++对应API
ros::ok() -
Python对应API
rospy.is_shutdown()
##Node工具
查询当前运行的所有节点
rosnode list
查询当前运行的所有节点测试节点是否存活
rosnode ping /节点名称
查询节点信息
rosnode info /节点名称
杀死节点
rosnode kill /节点名称
清理假死的节点
rosnode cleanup
6.常规配置介绍
理解package.xml配置
在package中,存在package.xml文件,此文件主要是描述当前package的一些信息。
demo_py
0.0.0
The demo_py package
itheima
TODO
catkin
roscpp
rosmsg
rospy
roscpp
rosmsg
rospy
roscpp
rosmsg
rospy
- name: 描述了当前package的名称
- version: 描述了当前package的版本信息
- build_depend: 编译时依赖
- build_export_depend: 编译导出依赖
- exec_depend: 执行依赖
package.xml文件是我们通过catkin_create_pkg创建package时自动生成的,我们要求能看懂当前文件的一些含义。
我们还需要掌握,当我们的项目在开发阶段,需要引入一些其他依赖时,需要在此处配置一些依赖。主要是掌握build_depend,build_export_depend,exec_depend进行配置依赖
理解CMakeLists.txt
CMakeLists.txt是在创建Package时自动生成的,不需要我们去写。
c++11支持
通常开发过程中我们会添加c++11的支持,只需要解开以下注释:
add_compile_options(-std=c++11)
find_package
find_package(catkin REQUIRED COMPONENTS
roscpp
rosmsg
rospy
)
此处的find_package提供了ros的package依赖支持。
package依赖指的是一个package依赖另外一个package,在ros中提供了很多package。
roscpp提供的是c++ 开发和编译环境,配置时需要在此处添加,也需要在package.xml中配置。
rospyt提供的是python开发和编译环境
build
在CMakeLists.txt中,搜索以下
###########
## Build ##
###########
在build区域中,通过add_executable添加可执行的配置。
add_executable(exe_name src/xxx.cpp src/h1.h src/h2.h)
内置填写可以分为多个部分:
exe_name指的是打包出来可执行文件名称
src/xxx.cpp指的是可执行文件
src/h1.h src/h2.h ...指的是可执行文件依赖的文件
在build区域中,通过target_link_libraries添加动态链接库。
target_link_libraries(
exe_name
${catkin_LIBRARIES}
)
TIP
exe_name要和前面add_executable可执行配置名称一致。
${catkin_LIBRARIES}是标准库,默认必须添加。
理解CMakeLists.txt
CMakeLists.txt是在创建Package时自动生成的,不需要我们去写。
c++11支持
通常开发过程中我们会添加c++11的支持,只需要解开以下注释:
add_compile_options(-std=c++11)
find_package
find_package(catkin REQUIRED COMPONENTS
roscpp
rosmsg
rospy
)
此处的find_package提供了ros的package依赖支持。
package依赖指的是一个package依赖另外一个package,在ros中提供了很多package。
roscpp提供的是c++ 开发和编译环境,配置时需要在此处添加,也需要在package.xml中配置。
rospyt提供的是python开发和编译环境
build
在CMakeLists.txt中,搜索以下
###########
## Build ##
###########
在build区域中,通过add_executable添加可执行的配置。
add_executable(exe_name src/xxx.cpp src/h1.h src/h2.h)
内置填写可以分为多个部分:
exe_name指的是打包出来可执行文件名称
src/xxx.cpp指的是可执行文件
src/h1.h src/h2.h ...指的是可执行文件依赖的文件
在build区域中,通过target_link_libraries添加动态链接库。
target_link_libraries(
exe_name
${catkin_LIBRARIES}
)
exe_name要和前面add_executable可执行配置名称一致。
${catkin_LIBRARIES}是标准库,默认必须添加。
7.Topic通讯
ROS整个工程启动后的一个结构现状如图:

多个Node节点都需要到ROS Master进行注册。
每个Node完成自己的功能逻辑。有的时候Node和Node间需要有数据的传递,这个时候ROS提供了一种数据通讯机制。

ROS 在设计Node间通讯机制的时候,考虑的还是比较周详的,设计了Topic通讯机制,如下图:
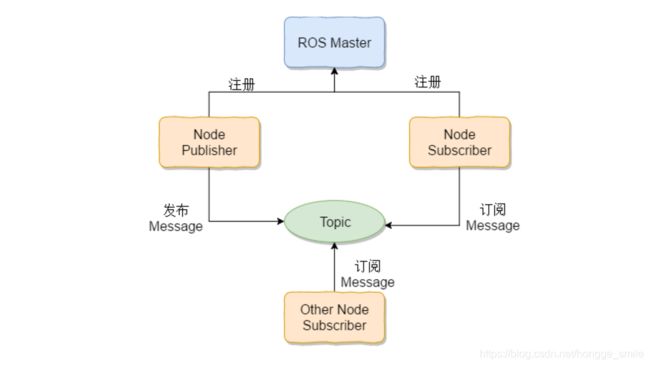
Node间进行通讯,其中发送消息的一方,ROS将其定义为Publisher(发布者),将接收消息的一方定义为Subscriber(订阅者)。考虑到消息需要广泛传播,ROS没有将其设计为点对点的单一传递,而是由Publisher将信息发布到Topic(主题)中,想要获得消息的任何一方都可以到这个Topic中去取数据。我们理解Topic的时候,可以认为Topic相当于一个聚宝盆,东西放进去后,不管同时有多少人来取,都可以拿到数据。
7.1实现publisher的C++代码
#include "ros/ros.h"
#include
#include "std_msgs/String.h"
using namespace std;
int main(int argc, char **argv) {
string nodeName = "cpppublisher";
string topicName = "cpptopic";
//初始化ros节点
ros::init(argc, argv, nodeName);
ros::NodeHandle node;
//通过节点创建publisher
const ros::Publisher &publisher = node.advertise(topicName, 1000);
//按照一定周期,发布消息
int index = 0;
ros::Rate rate(1);
while (ros::ok()) {
std_msgs::String msg;
msg.data = "hello pub " + to_string(index);
publisher.publish(msg);
rate.sleep();
index++;
}
return 0;
}
调试发布者
调试Publisher主要是查看是否有发送数据,也就是提供一个订阅的调试工具。ROS提供了命令行工具和图形化工具进行调试。
1. 通过rostopic工具进行调试
查看所有的主题
rostopic list
打印主题所发布的信息
rostopic echo cpptopic
2. 通过rqt_topic工具进行调试
通过命令启动rqt_topic工具
rosrun rqt_topic rqt_topic
选中要调试的主题
7.2 实现subscribe的C++代码
#include "ros/ros.h"
#include
#include "std_msgs/String.h"
using namespace std;
void topicCallback(const std_msgs::String::ConstPtr &msg) {
cout << (*msg).data << endl;
}
int main(int argc, char **argv) {
string nodeName = "cppsubscriber";
string topicName = "cpptopic";
//初始化节点
ros::init(argc, argv, nodeName);
ros::NodeHandle node;
//创建订阅者
const ros::Subscriber &subscriber = node.subscribe(topicName, 1000, topicCallback);
// 阻塞线程
ros::spin();
return 0;
}
调试订阅者
调试Subscriber主要是查看是否能收到数据,也就是提供一个发布的调试工具。ROS提供了命令行工具和图形化工具进行调试。
1. 通过自己编写的publisher进行调试
rosrun demo_topic cpppublisher
2. 通过rostopic工具进行调试
查询主题所需要的数据类型
rostopic type cpptopic
模拟发布数据
rostopic pub cpptopic std_msgs/String hello -r 10
rostopic pub是模拟发布数据的命令
cpptopic是将数据发送到那个主题,根据自己实际调试的主题来写。
std_msgs/String是这个主题所需要的数据类型,我们是通过rostopic type cpptopic进行查询出来的。
hello是发送的数据,根据自己的调试需求来写。
-r 指的是发送频率
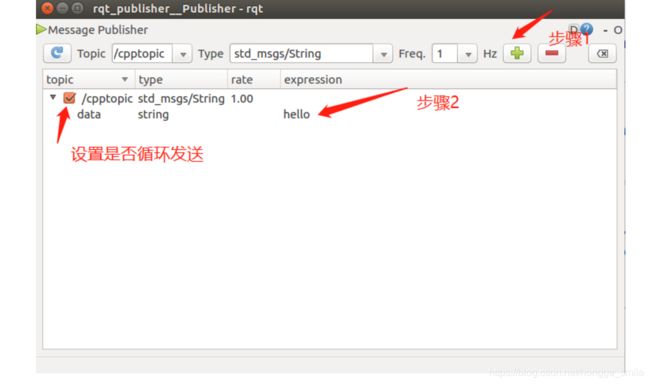
3. 通过rqt_publisher工具进行调试
通过命令启动rqt_publisher工具
rosrun rqt_publisher rqt_publisher
4.查看节点关系示意图
rosrun rqt_graph rqt_graph

7.3实现publisher的python代码
#!/usr/bin/env python
# coding:utf-8
import rospy
from std_msgs.msg import String
if __name__ == '__main__':
nodeName = "pypublisher"
topicName = "pytopic"
# 初始化节点
rospy.init_node(nodeName)
# 创建发布者
publisher = rospy.Publisher(topicName, String, queue_size=1000)
rate = rospy.Rate(10)
count = 0
while not rospy.is_shutdown():
# 发布消息
publisher.publish("hello %d" % count)
rate.sleep()
count += 1;
调试发布者
调试Publisher主要是查看是否有发送数据,也就是提供一个订阅的调试工具。ROS提供了命令行工具和图形化工具进行调试
1.通过rostopic工具进行调试
查看所有的主题
rostopic list
打印主题所发布的信息
rostopic echo pytopic
2. 通过rqt_topic工具进行调试
通过命令启动rqt_topic工具
rosrun rqt_topic rqt_topic
选中要调试的主题

8.Msg消息
在现有的模型中,我们通常都是Node与Node节点进行数据的传递。

查询所有的消息类型
rosmsg list
可以查询出当前支持的所有消息类型。例如我们用到过的std_msgs/String和geometry_msgs/Twist
查询消息类型的数据结构
我们还可以对一个消息的数据结构进行查询。
rosmsg show std_msgs/String
结果显示为string data,说明了std_msgs/String这种消息类型的数据,内部包含了一个叫做data类型为string的数据。
我们也可以看看geometry_msgs/Twist包含了什么数据
rosmsg show geometry_msgs/Twist
结果显示为:
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
geometry_msgs/Twist包含了 linear和angular两个数据。
linear的数据类型为geometry_msgs/Vector3。
angular的数据类型为geometry_msgs/Vector3。
我们发现在linear下面的x,y,z是有缩进的,这个缩进表示的是,geometry_msgs/Vector3这种类型的数据下面包含了三个数据x,y,z,他们的类型都是float64。
8.1自定义消息
自定义消息流程
1 . 创建msg目录,移除不需要的目录
在pakage目录下新建msg目录,删除掉include和src目录
2. 新建Student.msg文件
创建的这个Student.msg文件就是自定义消息文件,需要去描述消息的格式。
我们可以编辑代码如下
string name
int64 age
这个自定义的消息包含两个数据形式,name和age,name的类型 是string,age的类型是int64。
这个msg文件其实遵循一定规范的,每一行表示一种数据。前面是类型,后面是名称。
ros不只是提供了int64和string两种基本类型供我们描述,其实还有很多:
| msg类型 | C++对应类型 | Python对应类型 |
|---|---|---|
bool |
uint8_t |
bool |
int8 |
int8_t |
int |
int16 |
int16_t |
int |
int32 |
int32_t |
int |
int64 |
int64_t |
int,long |
uint8 |
uint8_t |
int |
uint16 |
uint16_t |
int |
uint32 |
uint32_t |
int |
uint64 |
uint64_t |
int,long |
float32 |
float |
float |
float64 |
float |
float |
string |
std:string |
str,bytes |
time |
ros:Time |
rospy.Time |
duration |
ros::Duration |
rospy.Duration |
3. 配置package.xml文件
在package.xml种添加如下配置:
message_generation
message_runtime
message_generation是消息生成工具,在打包编译时会用到
message_runtime运行时消息处理工具
4. 配置CMakeLists.txt
在find_package添加message_generation,结果如下:
find_package(catkin REQUIRED COMPONENTS
roscpp
rosmsg
rospy
message_generation
)
添加add_message_file,结果如下:
add_message_files(
FILES
Student.msg
)
这里的Student.msg要和你创建的msg文件名称一致,且必须时在msg目录下,否则编译会出现问题
添加generation_msg,结果如下:
generate_messages(
DEPENDENCIES
std_msgs
)
这个配置的作用是添加生成消息的依赖,默认的时候要添加std_msgs
修改catkin_package,结果如下:
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo_msg
# CATKIN_DEPENDS roscpp rosmsg rospy
# DEPENDS system_lib
CATKIN_DEPENDS message_runtime
)
为catkin编译提供了依赖message_runtime
检验自定义消息
1. 编译项目
来到工作空间目录下,运行编译
catkin_make
2. 查看生成的头文件
来到devel的include目录下,如果生成了头文件说明,自定义消息创建成功。
3. 通过rosmsg工具校验
rosmsg show demo_msgs/Student
查看运行结果,运行结果和自己定义的相一致,说明成功。
C++使用自定义消息
1. 自定义消息依赖的添加
在开发过程种,自定义消息是以一个package存在的,其他package需要用到这个自定义消息的package,是需要添加依赖的。
来到package.xml中,添加如下:
demo_msgs
demo_msgs
demo_msgs
来到CMakeLists.txt文件中,找到find_package,添加demo_msgs自定义消息依赖,添加结果如下:
find_package(catkin REQUIRED COMPONENTS
roscpp
rosmsg
rospy
demo_msgs
)
2. 引入依赖
#include "demo_msgs/Student"
3. 构建消息
demo_msgs::Student stu;
stu.name = "itheima";
stu.age = 13;
消息依赖加入后,具体类型是demo_msgs::Student
Python使用自定义消息
1. 导入模块
from demo_msgs.msg import Student
python导入自定义消息模块,遵循一定的规范,from 模块名.msg import 具体的消息
2. 构建消息
stu = Student()
stu.name = "itheima"
stu.age = 13
8.2 复杂类型消息
引用自定义消息
开发过程中,有的时候会碰到传递的数据结构复杂,会有嵌套消息的存在,例如现在需要创建一个Team.msg,基本结构如下:
| 名称 | 类型 | 描述 |
|---|---|---|
| name | string |
团队名称 |
| leader | TODO | 团队领导 |
在这个设计过程中,我们希望leader这个属性是一个复杂类型,对应着我们之前自定义的Student.msg。那么当前的Team.msg该如何编写。
首先,我们在msg目录下新建Team.msg,Team.msg的内容如下:
string name
Student leader
Team.msg要去引用Student.msg,Student就是具体类型,通过Student leader来去声明。
接着,我们要到CMakeLists.txt文件中,修改add_message_files,修改如下:
add_message_files(
FILES
Student.msg
Team.msg
)
其实我们就是添加了Team.msg。
值得注意的是,Team.msg不能放到Student.msg前面,原因是,Team.msg引用了Student.msg,如果调换位置,编译器会先去编译Team.msg,这个时候编译器是找不到Student.msg,因此会出现错误。
被引用对象要放到引用者的前面。
引用标准消息库
rosmsg是ros的标准消息库,开发中,有的时候我们需要将标准消息封装到自己的消息中去的。例如Team.msg中需要加入一个数据进行描述Team情况:
| 名称 | 类型 | 描述 |
|---|---|---|
| name | string |
团队名称 |
| leader | Student |
团队领导 |
| intro | TODO | 团队介绍 |
在此处,我们希望intro的类型是std_msgs/String,我们对Team.msg实际编码为:
string name
Student leader
std_msgs/String intro
Team.msg要去使用std_msgs/String,std_msgs/String就是具体类型,通过std_msgs/String intro来去声明。
引用其他三方消息
作为自定义的消息,有可能还需要使用三方的消息库,我们在此以geometry_msgs这个三方库作为案例进行说明。
| 名称 | 类型 | 描述 |
|---|---|---|
| name | string |
团队名称 |
| leader | Student |
团队领导 |
| intro | std_msgs/String |
团队介绍 |
| location | TODO | 位置 |
在此处,我们希望location的类型是geometry_msgs/Twist,我们对Team.msg实际编码为:
string name
Student leader
std_msgs/String intro
geometry_msgs/Twist location
需要对msgs文件夹内CMakeLists.txt进行修改(新增geometry_msgs):
find_package(catkin REQUIRED COMPONENTS
roscpp
rosmsg
rospy
message_generation
geometry_msgs
)
generate_messages(
DEPENDENCIES
std_msgs
geometry_msgs
)
引入三方库过程中,我们需要对src文件夹的package.xml文件进行配置添加:
geometry_msgs
geometry_msgs
geometry_msgs
我们还需要对CMakeLists.txt进行修改,在find_package中添加如下:
find_package(catkin REQUIRED COMPONENTS
roscpp
rosmsg
rospy
message_generation
geometry_msgs
)
添加geometry_msgs是方便编译器在查找包时,能找到这个库。
在generate_messages中添加geometry_msgs如下:
generate_messages(
DEPENDENCIES
std_msgs
geometry_msgs
)
此处是为了生成定义好的头文件而去做配置
消息类型为数组
作为自定义的消息,有的时候我们需要去定义数组集合来去帮我们存储数据,例如我们要加入members来描述成员:
| 名称 | 类型 | 描述 |
|---|---|---|
| name | string |
团队名称 |
| leader | Student |
团队领导 |
| intro | std_msgs/String |
团队介绍 |
| location | geometry_msgs/Twist |
位置 |
| members | TODO | 团队成员 |
在此处,我们希望members的类型是Student的数组集合类型,我们对Team.msg实际编码为:
string name
Student leader
std_msgs/String intro
geometry_msgs/Twist location
Student[] members
我们采用[]表示数组,对应中C++中的Vector类型,对应Python中的列表list
二.小乌龟案例
小乌龟节点启动
1. 启动小乌龟模拟器节点
rosrun turtlesim turtlesim_node
2. 启动小乌龟键盘输入节点
rosrun turtlesim turtle_teleop_key
启动完成后,可以通过键盘输入操控小乌龟移动。
小乌龟操控原理
1. 节点信息查看
小乌龟启动过程中,我们启动了两个可执行的程序:turtlesim_node和turtle_teleop_key 。可以通过命令查看当前的启动的节点:
rosnode list
可以查看到启动程序对应的节点/turtlesim和/teleop_turtle
通过命令可以查看/turtlesim节点的详情
rosnode info /turtlesim
命令运行后,可以看到以下结果:
--------------------------------------------------------------------------------
Node [/turtlesim]
Publications:
* /rosout [rosgraph_msgs/Log]
* /turtle1/color_sensor [turtlesim/Color]
* /turtle1/pose [turtlesim/Pose]
Subscriptions:
* /turtle1/cmd_vel [geometry_msgs/Twist]
Services:
* /clear
* /kill
* /reset
* /spawn
* /turtle1/set_pen
* /turtle1/teleport_absolute
* /turtle1/teleport_relative
* /turtlesim/get_loggers
* /turtlesim/set_logger_level
contacting node http://ubuntu:42049/ ...
Pid: 20218
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound
* transport: TCPROS
* topic: /turtle1/cmd_vel
* to: /teleop_turtle (http://ubuntu:44433/)
* direction: inbound
* transport: TCPROS
rosnode info命令可以查看当前节点的一些信息:
- Publications:此节点上定义的发布者
- Subscriptions:此节点上定义的订阅者
- Services:此节点上定义的服务
- 进程id,占用的网络端口
- Connections: 此节点和其他节点间的连接信息
同理,我们也可以通过rosnode info查询/teleop_turtle节点的信息,结果如下:
--------------------------------------------------------------------------------
Node [/teleop_turtle]
Publications:
* /rosout [rosgraph_msgs/Log]
* /turtle1/cmd_vel [geometry_msgs/Twist]
Subscriptions: None
Services:
* /teleop_turtle/get_loggers
* /teleop_turtle/set_logger_level
contacting node http://ubuntu:44433/ ...
Pid: 20443
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound
* transport: TCPROS
* topic: /turtle1/cmd_vel
* to: /turtlesim
* direction: outbound
* transport: TCPROS
现在我们大致可以搞清楚一些通讯的关系:
/teleop_turtle节点存在一个发布者,往/turtle1/cmd_vel主题中发布数据。/turtlesim节点存在一个订阅者,去/turtle1/cmd_vel主题中获取数据。
2. 可视化工具查询节点关系
rqt_graph工具提供了可视化的工具方便我们查看这种节点间的关系:
rosrun rqt_graph rqt_graph
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-hLwtVjh4-1581315862493)(img/小乌龟节点关系图.png)]
图像显示,/teleop_turtle通过主题/turtle1/cmd_vel给/turtlesim进行数据传递
调试工具操控小乌龟
1. rqt_publisher模拟数据发送
启动rqt_publisher工具
rosrun rqt_publisher rqt_publisher
通过图形化配置参数:

2. 通过命令行模拟数据发送
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 3.0"
小乌龟坐标系相关
面板
- 面板的坐标原点在左下脚,即左下角为(0,0)
- 面板的X轴是自左向右,数值是0开始正向增长
- 面板的Y轴是自下向上,数值是0开始正向增长
- 面板的宽度和高度相同,值为11.088899
小乌龟
- 小乌龟的坐标原点为小乌龟的中心点。
小乌龟移动指令参数
我们通过rostopic命令可以获得小乌龟的移动数据类型为geometry_msgs/Twist
rostopic type /turtle1/cmd_vel
通过rosmsg命令可以查看数据的详细格式:
rosmsg show geometry_msgs/Twist
输出的格式为:
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
geometry_msgs/Vector3 linear指的是线速度,小乌龟只用到了float64 x,代表着乌龟向前进的线速度
geometry_msgs/Vector3 angular指的是角速度,小乌龟只用到了float64 z,代表着乌龟旋转的角速度
重置小乌龟
rosservice call/reset
需求介绍与分析
实现图形化界面,来控制小乌龟的运行。

小乌龟的模拟器,其实是一个Subscriber订阅者,我们要控制小乌龟的移动,我们就去创建一个Publisher发布者,按照Topic主题规范发布信息。
总结起来,我们要干的事情就是:
- 创建QT UI
- 创建 Publisher
- 整合QT UI 和 Publisher进行数据发布
Qt 环境配置
C++ 开发ROS项目过程中,如果要引入Qt,需要进行依赖的配置。
以新建的demo_turtlepackage为例,我们就要对CMakeLists.txt进行依赖配置。
1. 添加c++ 11编译的支持
add_compile_options(-std=c++11)
默认的时候,这个配置是被注释起来的,我们只要解开注释就可以。
2. 添加Qt的环境配置
##############################################################################
# Qt Environment
##############################################################################
set(CMAKE_INCLUDE_CURRENT_DIR ON)
set(CMAKE_AUTOMOC ON)
find_package(Qt5 COMPONENTS Core Gui Widgets PrintSupport)
##############################################################################
find_package中,都是要加载的Qt模块,后续如果还需要添加其他的Qt模块,可以在后面追加。
Node 创建流程
1. 创建node启动的cpp文件
在src目录下创建turtle_control.cpp,代码如下:
#include "ros/ros.h"
#include
using namespace std;
int main(int argc, char *argv[]) {
string nodeName = "qt_turtle_ctrl";
// 创建节点
ros::init(argc,argv,nodeName);
ros::NodeHandle node;
return 0;
}
2. 配置CMake
来到CMakeLists.txt文件中,添加如下:
add_executable(turtle_control src/turtle_control.cpp)
target_link_libraries(turtle_control
${catkin_LIBRARIES}
Qt5::Core
Qt5::Gui
Qt5::Widgets
Qt5::PrintSupport
)
add_executable是把turtle_control.cpp标记为可执行的
target_link_libraries是为turtle_control.cpp提供链接库的,值得注意的是,${catkin_LIBRARIES}是ros的依赖库,Qt5::Core,Qt5::Gui,Qt5::Wigets,Qt5::PrintSupport是qt的依赖库。
Qt UI的创建
C++代码实现
1. Qt库的引入
#include
#include
QtWidgets是qt的组件模块,提供大量的ui控件
QApplication是Qt应用入口
2. 编写Qt窗体
// 创建Qt Application
QApplication app(argc, argv);
// 创建窗体
QWidget window;
// 设置窗体为当前激活窗体
app.setActiveWindow(&window);
//显示窗体
window.show();
// Qt程序执行
app.exec();
3. 根据需求进行UI布局
// 设置布局
QFormLayout layout;
window.setLayout(&layout);
// 距离输入框
QLineEdit editLinear;
layout.addRow("距离", &editLinear);
// 角度输入框
QLineEdit editDegrees;
layout.addRow("角度", &editDegrees);
// 发送按钮
QPushButton btnSend("发送");
layout.addRow(&btnSend);
4. 事件添加
btnSend.connect(&btnSend, &QPushButton::clicked, &window, btnClicked);
void btnClicked() {
std::cout << "clicked" << std::endl;
}
Publisher创建
1. 创建publisher对象
const ros::Publisher &publisher = node.advertise(topicName, 1000);
值得注意的是,在创建publisher对象时,这里要去确定的有两个点,第一就是topicName,第二就是传递的消息类型。
此处我们只能确定topic 的名称,给小乌龟发送数据的topic为/turtle1/cmd_vel
2. 确定消息传递的数据类型
通过rostopic命令查询主题对应的消息类型
rostopic type /turtle1/cmd_vel
得到的结果为geometry_msgs/Twist接下来我们需要导入这个消息类型对应的库
#include "geometry_msgs/Twist.h"
接下来就是确定publisher创建时候的类型
const ros::Publisher &publisher = node.advertise(topicName, 1000);
一些规律的掌握,消息类型为geometry_msgs/Twist,需要导入的头文件为geometry_msgs/Twist.h,需要确定的编码类型为geometry_msgs::Twist
3. 发送消息
//创建消息
geometry_msgs::Twist twist;
//填充消息数据
twist.linear.x = linearX;
twist.angular.z = angularZ * M_PI / 180;
//发送消息
publisherPtr->publish(twist);
完整实例代码
#include "ros/ros.h"
#include
#include "std_msgs/String.h"
#include "QtWidgets"
#include "QApplication"
#include "geometry_msgs/Twist.h"
#include "math.h"
using namespace std;
void sendclicked(ros::Publisher &publisher, QLineEdit &lineredit, QLineEdit &angularedit) {
double x = lineredit.text().toDouble();
double z = angularedit.text().toDouble();
geometry_msgs::Twist twist;
twist.linear.x = x;
twist.angular.z = z *M_PI / 180;
publisher.publish(twist);
// cout << "clicked" << endl;
}
int main(int argc, char **argv) {
string nodeName = "turtle_ctrl";
string topicName = "turtle1/cmd_vel";
//初始化ros节点
ros::init(argc, argv, nodeName);
ros::NodeHandle node;
//创建publisher
ros::Publisher publisher = node.advertise(topicName, 1000);
//创建Qt,application
QApplication app(argc, argv);
//创建窗体
QWidget window;
//设置窗体大小及标题
window.resize(600, 150);
window.setWindowTitle("小乌龟控制器");
//表单布局
QFormLayout layout;
window.setLayout(&layout);
//线速度输入框
QLineEdit lineredit("0.0");
layout.addRow("线速度", &lineredit);
//角速度输入框
QLineEdit angularedit("0.0");
layout.addRow("线速度", &angularedit);
//button
QPushButton btn("发送");
layout.addRow(&btn);
//点击事件
btn.connect(&btn, &QPushButton::clicked, &window, [&publisher, &lineredit, &angularedit]() {
sendclicked(publisher, lineredit, angularedit);
});
//展示窗体
window.show();
//程序退出
return app.exec();
}
python代码实现
1. python环境配置
为clion添加python2的支持,具体可以参考前面的讲解
在新建的py文件开头添加环境说明:
#!/usr/bin/env python
#coding:utf-8
修改新建py文件的权限,添加可执行权限
chmod +x turtle_control.py
2. node源码编写
import rospy
if __name__ == '__main__':
nodeName = "qt_turle_ctrl";
# 创建ros node
rospy.init_node(nodeName, anonymous=True)
Qt UI的创建
1. Qt库的引入
from PyQt5.QtWidgets import *
值得注意的是,在导入模块过程中是没有提示的。系统已经有Qt5的库,只是编译器没有找到。
2. 编写Qt窗体
# 创建Qt程序
app = QApplication(sys.argv)
# 创建窗体
window = QWidget()
window.setWindowTitle("小乌龟控制")
window.resize(400, 0)
# 显示窗体
window.show();
# Qt程序执行
sys.exit(app.exec_())
值得注意的是后面的app.exec()这个函数不能用,要用app.exec_()。
原因是当前的Qt版本是5.5.1, 5.10.+的版本后面才支持的exec()
3. 根据需求进行UI布局
# 设在布局
layout = QFormLayout()
window.setLayout(layout)
# 添加组件
editLinear = QLineEdit()
editLinear.setText("0.0")
layout.addRow("距离", editLinear)
editAngular = QLineEdit()
editAngular.setText("0.0")
layout.addRow("角度", editAngular)
btnSend = QPushButton("发送")
layout.addRow(btnSend)
4. 事件添加
btnSend.clicked.connect(btnClicked)
define btnClicked():
print "clicked"
Publisher创建
1. 确定消息传递的数据类型
通过rostopic命令查询主题对应的消息类型
rostopic type /turtle1/cmd_vel
得到的结果为geometry_msgs/Twist接下来我们需要导入这个消息类型对应的模块到py文件中
from geometry_msgs.msg import Twist
一些规律的掌握,消息类型为geometry_msgs/Twist,需要导入的模块为geometry_msgs.msg下的Twist
2. 创建publisher对象
publisher = rospy.Publisher(topicName, Twist, queue_size=1000)
值得注意的是,在创建publisher对象时,这里要去确定的有两个点,第一就是topicName,第二就是传递的消息类型。
给小乌龟发送数据的topic为/turtle1/cmd_vel 类型为Twist
3. 发送消息
# 创建消息
twist = Twist()
# 填充数据
twist.linear.x = linearX
twist.angular.z = angluarZ * math.pi / 180
# 发送消息
publisher.publish(twist)
完整示例代码
#!/usr/bin/env python
# coding:utf-8
import rospy
from geometry_msgs.msg import Twist
from PyQt5.QtWidgets import *
import sys
import math
def btnClicked(editLinear, editAngluar, publisher):
linearX = float(editLinear.text())
angluarZ = float(editAngular.text())
# 创建消息
twist = Twist()
# 填充数据
twist.linear.x = linearX
twist.angular.z = angluarZ * math.pi / 180
# 发送消息
publisher.publish(twist)
if __name__ == '__main__':
nodeName = "qt_turle_ctrl";
topicName = "/turtle1/cmd_vel"
# 创建ros node
rospy.init_node(nodeName, anonymous=True)
# 创建publisher
publisher = rospy.Publisher(topicName, Twist, queue_size=1000)
# 创建Qt程序
app = QApplication(sys.argv)
# 创建窗体
window = QWidget()
window.setWindowTitle("小乌龟控制")
window.resize(400, 0)
# 设在布局
layout = QFormLayout()
window.setLayout(layout)
# 添加组件
editLinear = QLineEdit()
editLinear.setText("0.0")
layout.addRow("距离", editLinear)
editAngular = QLineEdit()
editAngular.setText("0.0")
layout.addRow("角度", editAngular)
btnSend = QPushButton("发送")
layout.addRow(btnSend)
# 事件
btnSend.clicked.connect(lambda: btnClicked(editLinear, editAngular, publisher))
window.show()
sys.exit(app.exec_())
小乌龟位置相关信息
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-6TF4LN5N-1581315862494)(img/小乌龟案例.png)]
小乌龟的模拟器,也是一个Publisher发布者,发布了当前小乌龟相关的数据信息,我们要获取小乌龟的数据,我们就去创建一个Subscriber订阅者,按照Topic主题规范进行订阅数据。
总结起来,我们要干的事情就是:
- 创建QT UI
- 创建 Publisher
- 整合QT UI 和 Subscriber进行数据订阅
C++代码实现
#include "ros/ros.h"
#include
#include "std_msgs/String.h"
#include "QtWidgets"
#include "QApplication"
#include "geometry_msgs/Twist.h"
#include "math.h"
#include "turtlesim/Pose.h"
using namespace std;
QLabel *lbX;
QLabel *lbY;
QLabel *linerV;
QLabel *angularV;
QLabel *theta;
void receiveCall(const turtlesim::Pose::ConstPtr &message) {
lbX->setText(QString::fromStdString(to_string(message->x)));
lbY->setText(QString::fromStdString(to_string(message->y)));
linerV->setText(QString::fromStdString(to_string(message->linear_velocity)));
angularV->setText(QString::fromStdString(to_string(message->angular_velocity)));
theta->setText(QString::fromStdString(to_string(message->theta)));
}
void sendclicked(ros::Publisher &publisher, QLineEdit &lineredit, QLineEdit &angularedit) {
double x = lineredit.text().toDouble();
double z = angularedit.text().toDouble();
geometry_msgs::Twist twist;
twist.linear.x = x;
twist.angular.z = z * M_PI / 180;
publisher.publish(twist);
// cout << "clicked" << endl;
}
int main(int argc, char **argv) {
string nodeName = "turtle_ctrl";
//publisher的广播地址
string topicName = "turtle1/cmd_vel";
//subcriber的接收地址
string receiveName = "/turtle1/pose";
//初始化ros节点
ros::init(argc, argv, nodeName);
ros::NodeHandle node;
//开启异步轮循器
ros::AsyncSpinner spinner(2);
spinner.start();
//创建publisher
ros::Publisher publisher = node.advertise(topicName, 1000);
//创建subcriber
const ros::Subscriber &subscriber = node.subscribe(receiveName, 100, receiveCall);
//创建Qt,application
QApplication app(argc, argv);
//创建窗体
QWidget window;
//设置窗体大小及标题
window.resize(600, 150);
window.setWindowTitle("小乌龟控制器");
//表单布局
QFormLayout layout;
window.setLayout(&layout);
//线速度输入框
QLineEdit lineredit("0.0");
layout.addRow("线速度", &lineredit);
//角速度输入框
QLineEdit angularedit("0.0");
layout.addRow("角速度", &angularedit);
//当前X坐标
lbX = new QLabel();
layout.addRow("当前X坐标", lbX);
//当前Y坐标
lbY = new QLabel();
layout.addRow("当前Y坐标", lbY);
//当前线速度
linerV = new QLabel();
layout.addRow("当前线速度", linerV);
//当前角速度
angularV = new QLabel();
layout.addRow("当前角速度", angularV);
//当前角度
theta = new QLabel();
layout.addRow("当前角速度", theta);
//button
QPushButton btn("发送");
layout.addRow(&btn);
//点击事件
btn.connect(&btn, &QPushButton::clicked, &window, [&publisher, &lineredit, &angularedit]() {
sendclicked(publisher, lineredit, angularedit);
});
//展示窗体
window.show();
// ros::spin();
//程序退出
return app.exec();
}
python代码实现
日志级别
日志级别的划分:
| 级别 | 描述 |
|---|---|
DEBUG |
调试日志,供开发测试使用 |
INFO |
常规日志,用户可见级别的信息 |
WARN |
警告信息。 |
ERROR |
错误信息。程序出错后打印的信息 |
FATAL |
致命错误。出现宕机的日志记录 |
日志可见等级顺序是:
DEBUG > INFO > WARN > ERROR > FATAL
通常程序在运行时,都会设置一个日志等级,默认等级时INFO。
- 假如将当前程序日志等级设置为
DEBUG,可查看到的日志信息包含:DEBUG,INFO,WARN,ERROR,FATAL - 假如将当前程序日志等级设置为
INFO,可查看到的日志信息包含:INFO,WARN,ERROR,FATAL - 假如将当前程序日志等级设置为
WARN,可查看到的日志信息包含:WARN,ERROR,FATAL - 假如将当前程序日志等级设置为
ERROR,可查看到的日志信息包含:ERROR,FATAL - 假如将当前程序日志等级设置为
FATAL,可查看到的日志信息包含:FATAL
C++日志API
在ROS系统中,提供了常规API供我们使用
基础API格式:
ROS_DEBUG("打印的内容");
ROS_INFO("打印的内容");
ROS_WARN("打印的内容");
ROS_ERROR("打印的内容");
ROS_FATAL("打印的内容");
stream API格式:
ROS_DEBUG_STREAM("打印的内容" << "hello");
ROS_INFO_STREAM("打印的内容" << "hello");
ROS_WARN_STREAM("打印的内容" << "hello");
ROS_ERROR_STREAM("打印的内容" << "hello");
ROS_FATAL_STREAM("打印的内容" << "hello");
Python日志API
rospy.logdebug("打印的内容")
rospy.loginfo("打印的内容")
rospy.logwarn("打印的内容")
rospy.logerror("打印的内容")
rospy.logfatal("打印的内容")
日志查看系统
我们可以时使用rqt_console命令来查看过滤日志
rosrun rqt_console rqt_console
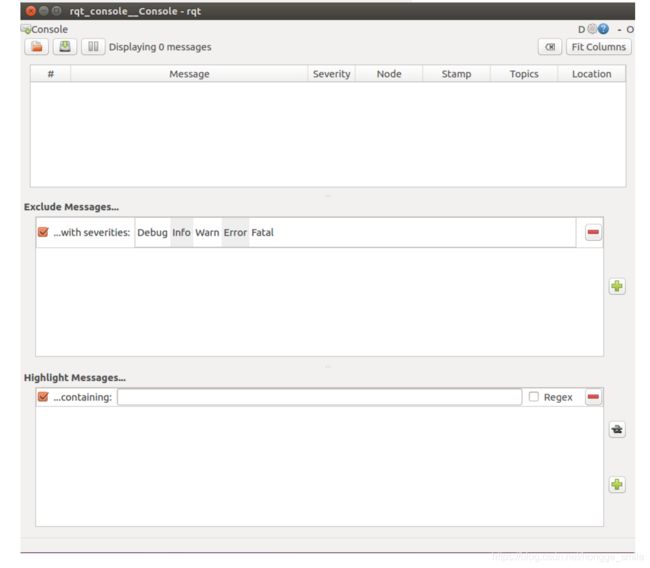
日志级别设置
通过右上角的设置按钮进入进行日志级别的设置:


日志级别过滤

三.Service通讯
1.Service通讯架构

ROS提供了节点与节点间通讯的另外一种方式:service通讯。
Service通讯分为client端和server端。
client端负责发送请求(Request)给server端。server端负责接收client端发送的请求数据。server端收到数据后,根据请求数据和当前的业务需求,产生数据,将数据(Response)返回给client端。
Service通讯的特点:
- 同步数据访问
- 具有响应反馈机制
- 一个server多个client
- 注重业务逻辑处理
Service通讯的关键点:
service的地址名称client端访问server端的数据格式server端响应client端的数据格式
需求
构建一个service通讯。需求是一个client端,一个server端。
server端为client端提供服务。
服务的内容是:帮助client端计算加法求和。
c++实现server端
#include "ros/ros.h"
#include
#include "roscpp_tutorials/TwoInts.h"
using namespace std;
bool callback(roscpp_tutorials::TwoIntsRequest &request, roscpp_tutorials::TwoIntsResponse &response) {
// 运算逻辑
response.sum = request.a + request.b;
return true;
}
int main(int argc, char **argv) {
string nodeName = "cppservice";
string serviceName = "/demo_service/add_tow_int";
// 创建节点
ros::init(argc, argv, nodeName);
ros::NodeHandle node;
// 创建服务端
const ros::ServiceServer &server = node.advertiseService(serviceName, callback);
//阻塞
ros::spin();
return 0;
}
调试server端
调试server端主要是查看server端是否能接收到请求,并根据请求数据处理相应的业务逻辑,然后返回处理好的结果。
在这里,我们只需要模拟client端发送请求就可以了。
ROS提供了命令行工具和图形化工具供我们调试开发。
1. rosservice命令行调试
通过rosservice list命令可以帮助我们查询出当前运行的所有service
rosservice list
查询的结果中,我们可以得到对应的服务名称/demo_service/add_tow_int
通过查询的服务名称,来调用此服务
rosservice call /demo_service/add_tow_int "a:1 b:3"
rosservice call负责调用service。第一个参数是要调用的service的名称,后面的参数是调用时需要传入的参数。
2.rqt_service_caller工具调试
通过命令呼出工具
rosrun rqt_service_caller rqt_service_caller

c++实现client端
#include "ros/ros.h"
#include
#include "roscpp_tutorials/TwoInts.h"
using namespace std;
int main(int argc, char **argv) {
string nodeName = "service_client";
string serviceName = "/demo_service/add_tow_int";
//创建节点
ros::init(argc, argv, nodeName);
ros::NodeHandle node;
//创建client
ros::ServiceClient &&client = node.serviceClient(serviceName);
//创建service
roscpp_tutorials::TwoInts service;
service.request.a = 10;
service.request.b = 5;
//调用service
client.call(service);
//打印结果
ROS_INFO_STREAM(service.response.sum);
return 0;
}
调试Client端
通过已有的server来调试client
rosrun demo_service client
python实现server端
#!/usr/bin/env python
# coding:utf-8
import rospy
from roscpp_tutorials.srv import TwoInts
def handler(request):
rospy.loginfo("python call")
return request.a + request.b
if __name__ == '__main__':
nodeName = "pyservice";
serviceName = "/demo_service/add_two_int"
# 创建节点
rospy.init_node(nodeName)
# 创建service
rospy.Service(serviceName, TwoInts, handler)
# 阻塞线程
rospy.spin()
调试Server
调试server端主要是查看server端是否能接收到请求,并根据请求数据处理相应的业务逻辑,然后返回处理好的结果。
在这里,我们只需要模拟client端发送请求就可以了。
ROS提供了命令行工具和图形化工具供我们调试开发。
1. rosservice命令行调试
通过rosservice list命令可以帮助我们查询出当前运行的所有service
rosservice list
查询的结果中,我们可以得到对应的服务名称/demo_service/add_tow_int
通过查询的服务名称,来调用此服务
rosservice call /demo_service/add_tow_int "a:1 b:3"
rosservice call负责调用service。第一个参数是要调用的service的名称,后面的参数是调用时需要传入的参数。
2.rqt_service_caller工具调试
通过命令呼出工具
rosrun rqt_service_caller rqt_service_caller

python实现client端
#!/usr/bin/env python
# encoding:utf-8
import rospy
from roscpp_tutorials.srv import TwoInts
if __name__ == '__main__':
nodeName = "pyclient"
serviceName = "/demo_service/add_two_int"
# 创建节点
rospy.init_node(nodeName)
# 等待服务器连接
rospy.wait_for_service(serviceName)
# 创建服务调用代理
call = rospy.ServiceProxy(serviceName, TwoInts)
# 调用服务
result = call(4, 9)
# 打印服务调用结果
rospy.loginfo(result)
调试Client端
通过已有的server来调试client
rosrun demo_service client.py
server_client案例

c++版本
python版本
四.Srv消息
业务与数据
在Service通讯模型中,我们通常都是Client将数据发送给Server,Server经过业务逻辑处理,将结果返回给client。如下图:

在此处,我们需要特别关注的就是传输过程中的Request和Response,这两个都是数据,一个是请求的数据,一个是响应的数据。从数据的角度来说,数据由业务所产生,但不应该与业务无关,应该与规范相关,其实就是定义规范来限制数据类型,来规范业务间的通讯。
在此,ROS提供的是srv数据来做此操作,如下图:

在数据交互过程中的请求阶段,我们将整个包当成一个srv,包含了request和response,这个阶段交给client端去填充request的数据。
在数据交互过程中的server处理阶段,server拿到client发送的srv包,从中获得request数据,根据业务逻辑来去处理操作数据。
在数据交互过程中的响应阶段,将server操作的结果填充到srv的response,将srv返回。
在这三个阶段中,srv自始至终就是一个数据包,规范了client的数据填充,也规范了server的数据填充。
在ROS中对于Service通讯模式的数据类型,系统提供了一些现成的类型供我们参考和使用。
查询所有的消息类型
rossrv list
可以查询出当前支持的所有消息类型。例如我们用到过的roscpp_tutorials/TwoInts
查询消息类型的数据结构
我们还可以对一个消息的数据结构进行查询。
rossrv show roscpp_tutorials/TwoInts
显示的结果为:
int64 a
int64 b
---
int64 sum
结果显示分为两个部分,中间用---分隔。
上面部分是request的数据规范。
下面部分是response的数据规范。
发散与探讨
我们在前面可以发现,ros系统还是提供了大量的数据类型供我们使用。但是数据类型再多,很有可能也满足不了我的实际业务场景,这个时候,我们就需要定制自己的数据类型了。
后面我们会着重讲到如何是定制自己的数据类型。
自定义消息
前言
在Ros中,如果没有现成的消息类型来描述要去传递的消息时,我们会自定义消息。
我们会新建一个Package来去自定义消息,通常这个Package写任何的业务逻辑,只是用来声明自定义的消息类型,可以只定义一种消息类型,也可以定义多种消息类型,根据业务需求来定。
所以,首先我们单独的创建一个package,我们取名为demo_srvs,一定要要添加roscpp,rospy,rosmsg的依赖。
这个包名取名也是有讲究的,业务名_srvs。
自定义消息流程
1 . 创建srv目录,移除不需要的目录
在pakage目录下新建srv目录,删除掉include和src目录
2. 新建.srv文件
创建的这个NumOption.srv文件就是自定义消息文件,需要去描述消息的格式。
我们可以编辑代码如下
float64 a
float64 b
string option
---
float64 result
这个.srv文件以---分隔为两部分,上面一部分包含a,b,option,下面一部分包含一个result.
在这里,上面部分是request的数据,下面部分是response的数据。
此案例中,我们要去做的就是,发送request,例如,a=3,b=3,option=*,那么server端接收到数据后,做a option b 的操作,即3 * 3,结果放到response中。
这个srv文件遵循一定规范的,每一行表示一种数据。前面是类型,后面是名称。和msg的规范一致
ros不只是提供了int64和string两种基本类型供我们描述,其实还有很多:
| msg类型 | C++对应类型 | Python对应类型 |
|---|---|---|
bool |
uint8_t |
bool |
int8 |
int8_t |
int |
int16 |
int16_t |
int |
int32 |
int32_t |
int |
int64 |
int64_t |
int,long |
uint8 |
uint8_t |
int |
uint16 |
uint16_t |
int |
uint32 |
uint32_t |
int |
uint64 |
uint64_t |
int,long |
float32 |
float |
float |
float64 |
float |
float |
string |
std:string |
str,bytes |
time |
ros:Time |
rospy.Time |
duration |
ros::Duration |
rospy.Duration |
3. 配置package.xml文件
在package.xml种添加如下配置:
message_generation
message_runtime
message_generation是消息生成工具,在打包编译时会用到
message_runtime运行时消息处理工具
4. 配置CMakeLists.txt
在find_package添加message_generation,结果如下:
find_package(catkin REQUIRED COMPONENTS
roscpp
rosmsg
rospy
message_generation
)
添加add_message_file,结果如下:
add_service_files(
FILES
NumOption.srv
)
这里的NumOption.srv要和你创建的srv文件名称一致,且必须时在srv目录下,否则编译会出现问题
添加generation_msg,结果如下:
generate_messages(
DEPENDENCIES
std_msgs
)
这个配置的作用是添加生成消息的依赖,默认的时候要添加std_msgs
修改catkin_package,结果如下:
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo_msg
# CATKIN_DEPENDS roscpp rosmsg rospy
# DEPENDS system_lib
CATKIN_DEPENDS message_runtime
)
为catkin编译提供了依赖message_runtime
检验自定义消息
1. 编译项目
来到工作空间目录下,运行编译
catkin_make
2. 查看生成的头文件
来到devel的include目录下,如果生成了头文件说明,自定义消息创建成功。
3. 通过rossrv工具校验
rossrv show demo_srvs/NumOption
查看运行结果,运行结果和自己定义的相一致,说明成功。
C++使用自定义消息
1. 自定义消息依赖的添加
在开发过程种,自定义消息是以一个package存在的,其他package需要用到这个自定义消息的package,是需要添加依赖的。
来到package.xml中,添加如下:
demo_srvs
demo_srvs
demo_srvs
来到CMakeLists.txt文件中,找到find_package,添加demo_msgs自定义消息依赖,添加结果如下:
find_package(catkin REQUIRED COMPONENTS
roscpp
rosmsg
rospy
demo_srvs
)
2. 引入依赖
#include "demo_srvs/NumOption.h"
3. 构建消息
demo_srvs::NumOption service;
service.request.a = 10;
service.request.b = 5;
service.request.option = "+";
消息依赖加入后,具体类型是demo_srvs::NumOption
Python使用自定义消息
导入模块
from demo_srvs.srv import NumOption
python导入自定义消息模块,遵循一定的规范,from 模块名.srv import 具体的消息
请求为复杂对象
现在我们制定一个.srv文件,用来描述一项服务:发送学生信息到服务端,让服务端返回生成的学生Id。
新建GenStudentId.srv文件,内容如下:
Student student
---
string id
这里的request中,包含的是一个复杂数据类型Student,这种类型来源于前面demo_msgs包中定义的Student.msg。那么我们该如何正确构建这个srv?
首先,在package.xml中去添加demo_msgs包的依赖:
demo_msgs
demo_msgs
demo_msgs
接着,在CMakeLists.txt中添加需要查找的包demo_msgs:
find_package(catkin REQUIRED COMPONENTS
roscpp
rosmsg
rospy
message_generation
demo_msgs
)
然后,在generate_messages中添加demo_msgs如下:
generate_messages(
DEPENDENCIES
std_msgs
demo_msgs
)
最后,在add_service_fils中,添加此文件:
add_service_files(
FILES
NumOption.srv
GenStudentId.srv
)
以上操作完成后,我们只需要编译工作空间,那么在devel/include目录中就会生成对应的依赖。
案例:扫地机器人
实现分析
小乌龟是按照一定的方式进行移动的,在整个移动过程中,小乌龟都是有自己的路径的,路径的规划是需要考虑的。
路径规划的算法有很多,但是根本就是生成一系列的点,将点按照顺序连在一起就是路径和轨迹了,点越多,路径越清晰。

目前小乌龟案例中,我们要解决的是小乌龟由一个点到另外一个点的运动。

小乌龟运动的特点是,前进或是转角,前进控制了移动的距离,转角控制了移动的方向。
要控制小乌龟移动到具体的点,就是要解决前进和转向的问题
案例设计
通过指定目标点的X和Y值,让小乌龟到达指定点。
完整初始化代码
#include
#include "ros/ros.h"
#include "QApplication"
#include "QtWidgets"
using namespace std;
void clickDone(QLineEdit *xEdit, QLineEdit *yEdit) {
double distX = xEdit->text().toDouble();
double distY = yEdit->text().toDouble();
ROS_INFO_STREAM("distX: " << distX << " distY:" << distY);
}
int main(int argc, char **argv) {
string nodeName = "turtle_control";
// 创建节点
ros::init(argc, argv, nodeName, ros::init_options::AnonymousName);
ros::NodeHandle node;
// 创建Qt程序
QApplication app(argc, argv);
//窗体
QWidget window;
window.setWindowTitle("小乌龟控制器");
window.resize(400, 0);
//布局
QFormLayout layout;
window.setLayout(&layout);
// 目标x坐标
QLineEdit xEdit("10.54444");
layout.addRow("x坐标", &xEdit);
// 目标y坐标
QLineEdit yEdit("5.54444");
layout.addRow("y坐标", &yEdit);
//当前姿态坐标信息
QHBoxLayout poseLayout;
layout.addRow(&poseLayout);
QFormLayout xLayout;
QLabel xLb;
xLayout.addRow("x坐标", &xLb);
poseLayout.addLayout(&xLayout);
QFormLayout yLayout;
QLabel yLb;
yLayout.addRow("y坐标", &yLb);
poseLayout.addLayout(&yLayout);
QFormLayout thetaLayout;
QLabel thetaLb;
thetaLayout.addRow("角度", &thetaLb);
poseLayout.addLayout(&thetaLayout);
// 执行按钮
QPushButton btnDone("执行");
layout.addRow(&btnDone);
// 事件设置
btnDone.connect(&btnDone, &QPushButton::clicked, bind(&clickDone, &xEdit, &yEdit));
window.show();
return app.exec();
}
运动分析
小乌龟如何到达目标点?
数据获取
小乌龟当前的坐标和角度
可以通过订阅/turtle1/pose获得相关的信息
控制操作
通过设置小乌龟的线速度和角速度可以让小乌龟动起来
可以通过发布数据到/turtle1/cmd_vel控制小乌龟移动
示例代码
发布者与订阅者
//小乌龟控制地址
string velTopicName = "/turtle1/cmd_vel";
//小乌龟数据获得
string poseTopicName = "/turtle1/pose";
// 创建小乌龟移动发布者
ros::Publisher &&publisher = node.advertise(velTopicName, 1000);
// 创建小乌龟位置的订阅者
const ros::Subscriber &subscriber = node.subscribe(poseTopicName, 1000, poseCallback);
获取小乌龟实时位置信息的回调
void poseCallback(const turtlesim::Pose::ConstPtr &msg) {
ROS_INFO_STREAM("x: " << msg->x);
ROS_INFO_STREAM("y: " << msg->y);
ROS_INFO_STREAM("theta: " << msg->theta);
ROS_INFO_STREAM("linear: " << msg->linear_velocity);
ROS_INFO_STREAM("angular: " << msg->angular_velocity);
ROS_INFO_STREAM("degrees: " << msg->theta * 180 / M_PI);
ROS_INFO_STREAM("=========================================");
}
直线运动计算

通过最简单的示例,先解决指线运动。
距离 = 速度 * 时间
速度 = 距离 / 时间
我们已知的是当前小乌龟的坐标turtle(x, y) ,和目标点dist(x, y),我们要去得到是小乌龟的速度。
首先我们需要计算出两点间的距离:
distance = sqrt(pow(srcX - distX) + pow(srcY - distY))
其次我们需要确定的是时间time,我们可以给定一个预期的值。
我们可以将计算的结果进行运行测试。
测试发现,小乌龟默认运行的时间是1s。没有提供给我们设置时间接口。
解决时间不可控的问题
方案一:
ros::Rate rate(1);
for (int i = 0; i < 5; ++i) {
//设置速度
geometry_msgs::Twist twist;
twist.linear.x = linearVel;
twist.angular.z = 0;
publisher.publish(twist);
rate.sleep();
}
方案二:
double runDistance = 0;
while (runDistance < distance) {
//设置速度
geometry_msgs::Twist twist;
twist.linear.x = linearVel;
twist.angular.z = 0;
publisher.publish(twist);
rate.sleep();
runDistance += linearVel / hz;
}
方案三:
while (calcDistance(srcX, srcY, distX, distY) > 0.1) {
// 获取srcX,srcY
srcX = pose->x;
srcY = pose->y;
//设置速度
geometry_msgs::Twist twist;
twist.linear.x = linearVel;
twist.angular.z = 0;
publisher.publish(twist);
rate.sleep();
}
思考:是否存在完美的事物
- 速度是否是绝对平均
- 距离差值是否是绝对为0
- 时间是否绝对为预期
什么是控制系统
人其实也是一个复杂的控制系统,体温,血压,ph值等…
人: 走进很热的房间,体温升高, sensor皮肤表面,感觉到热,controller下丘脑释放神经胆碱,你开始出汗。水分蒸发带走热量,体温回到正常。
电梯:当用户选择楼层后,电梯会在指定楼层停靠。
汽车,地铁,自动门,飞机定速巡航,自动导航都需要用到控制系统。
开环控制(Open Loop Control)
根据你选定的时间,衣服类型进行控制, 清洗不是根据衣服的干净程度控制。 一旦洗衣机开始运行,时间到了就停止工作,不管衣服是不是清洗干净了。

闭环控制

变频空调就采用了闭环控制。

位式控制算法
早期的空调采用的算法是位式控制算法。
位式控制的算法,输出信号只有两种,True和False
依据比较(sv和pv)
缺点:pv总是在sv的值上下波动
原因:控制对象具有惯性,空调降温时是慢慢往下降的,某个时刻自动断电,如果温度超出设定值,又自动的供电进行制冷。
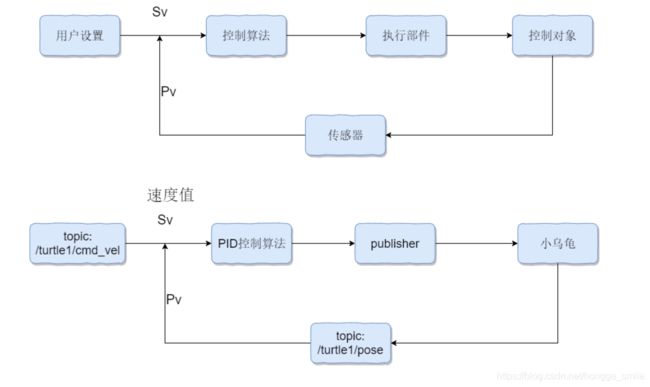
PID算法
空调的变频算法其实就是PID算法。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-tJVawh1F-1581315862500)(img/PID算法.png)]
proportional(比例), integral(积分),derivative(微分)
对位式控制的优化
- 位式控制,只考虑当前。
- pid不仅考虑当前,还要考虑历史
- pid输出更多样,更平滑。不是是true或者false,
变频空调的P控制:

error是误差。
k是一个系数。
设置值的温度和当前温度存在误差,我们可以设置这个空调的温度为 当前温度减去 误差值(或者给个系数),长久来说,当前温度会在设定温度上下浮动。
变频空调的I控制:

I算法主要是记录历史的错误,将这些错误进行累加。
在P控制中,当前温度是在设定温度上下摆动的,因此,误差应该是有正有负,全部累加到一起,正负抵消,剩下的得到的是总误差值。
让当前温度+总误差(或者给定系数),让当前温度趋向于设定温度。
变频空调的D控制

D算法主要是记录当前误差和最近一次的误差,
两次误差比较结果为0,说明已经到达设置水平。
两次误差比较结果绝对值大,说明往反方向走,温度没有趋向于设置的值,反而还在背离。
让当前温度+两次误差比较结果(给定系数),可以收敛误差,让温度值更趋向于设定温度。
krqt_Plot使用
rosrun rqt_plot rqt_plot
运行plot可视化界面。
设置侦听的topic地址,接收绘制。
小乌龟的PID实现
P控制逻辑
//计算当前距离目标点的距离
double linearDistance = calcDistance(srcX, srcY, distX, distY);
//计算剩下了的平均速度
double linearTargetVel = linearDistance / time;
//计算速度误差
double linearError = linearTargetVel - linearVel;
Kp值为0.1时,速度的趋势

Kp值为0.4时,速度的趋势

Kp值为0.7时,速度的趋势

I控制逻辑
linearTotalError += linearError;
D控制逻辑
double linearDeltaError = linearError - linearLastError;
linearLastError = linearError;
PID口诀
参数整定找最佳,从小到[大顺序查 先是比例后积分,最后再把微分加 曲线振荡很频繁,比例度盘要放大 曲线漂浮绕大湾,比例度盘往小扳 曲线偏离回复慢,积分时间往下降 曲线波动周期长,积分时间再加长 曲线振荡频率快,先把微分降下来 动差大来波动慢。微分时间应加长 理想曲线两个波,前高后低4比1 一看二调多分析,调节质量不会低.