【CCF BDCI 2023】多模态多方对话场景下的发言人识别 Baseline 0.71 Slover 部分
【CCF BDCI 2023】多模态多方对话场景下的发言人识别 Baseline 0.71 Slover 部分
- 概述
- Solver 在多模态发言人识别中的作用
-
- Solver 在多模态发言人识别中的重要性
- Solver 的工作原理
- 二次规划
-
- 二次规划的基本形式
- 二次规划的特点
- 二次规划在多模态发言中的应用 (我的理解)
- 代码详解
-
- 数据转化
- 目标函数和约束设定
- 约束条件的设定
- CVXPY 和 Gurobi 求解
-
- CVXPY
- Gurobi
- CVXPY 和 Gurobi 求解优化问题
- Citation
概述
现今技术日新月异, Artificial Intelligence 的发展正在迅速的改变我们的生活和工作方式. 尤其是在自然语言处理 (Natural Linguistic Processing) 和计算机视觉 (Computer Vision) 等领域.
传统的多模态对话研究主要集中在单一用户与系统之间的交互, 而忽视了多用户场景的复杂性. 视觉信息 (Visual Info) 往往会被边缘化, 仅作为维嘉信息而非对话的核心部分. 在实际应用中, 算法需要 “观察” 并与多个用户的交互, 这些用户有可能不是当前的发言人.
【CCF BDCI 2023】多模态多方对话场景下的发言人识别, 核心思想是通过多轮连续对话的内容和每轮对应的帧, 以及对应的人脸 bbox 和 name label, 从每轮对话中识别出发言人 (speaker).
Baseline 的代码分为三个文件, 分别为convex_optimization.py, dialog_roberta-constrasive.py, finetune_cnn-multiturn.py. 下面小白我就来带大家详解一下 Solver 部分.
Solver 在多模态发言人识别中的作用
求解器 (Solver) 在多模态发言人识别中的作用是整合和分析来自不同模态的数据, 如食品中的视觉信息和剧本中的文本信息. Slover 的任务是从这些复杂的数据中提取有用的信息, 并最终确定每个对话中的发言人 (Speaker).
Solver 在多模态发言人识别中的重要性
求解器的三大要点:
- 整合多模态数据: Solver 能够处理来自不同源的数据, 在这个赛题中为 CNN 和 NLP 的输出, 为识别提供不同的视角
- 优化决策过程: 通过应用数学和统计的方法, Solver 能够在众多潜在的发言人 (Potential) 中找到最优解
- 提高准确性:相比单一模态分析 (CNN or NLP or Audio, Solver 可以综合考虑多种信息, 先出提高发言人识别的准确率 (可以理解为类似 Bagging 算法)
Solver 的工作原理
Solver 通常采用数字优化技术, 如这次用到的二次规划 (Quadratic Programming), 来解决发言人识别问题. 首先将两个模型的输出转化为数学问题中的参数, 然后用过优化算法寻找这些参数的最优组合, 从而确定发言人 (Speaker).
二次规划
首先声明一下, 小白我是小学毕业, 数学水平停留在2x + 1 = 5的阶段, 下面的内容是基于网上内容 + 我的粗浅理解, 有不对的地方希望大家指正.
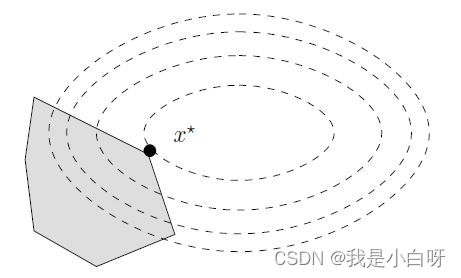
二次规划 (Quadratic Programming). 是一种特殊类型的数学优化问题, 涉及到一个二次目标函数和一系列线性约束.
二次规划的基本形式
二次规划问题可以形式化为下面的数学模型:
- 目标函数: f ( x ) = 1 2 x T Q x + c T x f(x) = \frac{1}{2} x^T Q x + c^T x f(x)=21xTQx+cTx
- 约束条件: A x ≤ b Ax \leq b Ax≤b
其中, x x x 是需要优化的变量向量, Q Q Q 是一个堆成矩阵, c c c 是一个向量, A A A 是一个矩阵, b b b 是一个向量. 目标是找到 x x x 的值, 使得目标函数 f ( x ) f(x) f(x)最大或最小化, 同时满足所有的线性约束条件.
二次规划的特点
二次规划的特点:
- 目标函数的二次性: 二次规划的核心特点是其目标函数是变量的二次函数. 这意味着目标函数可以有一个独特的最大值或最小值, 取决于矩阵 Q 的性质.
- 线性约束: 尽管目标函数是二次的, 但所有的约束都是线性的. 这些约束定义了一个可行域, 优化必须在这个域内
- 凸性: 如果矩阵 Q Q Q 是半正定的, 哪儿二次规划问题是凸的. 凸二次规划保证了全局最优解的存在
二次规划在多模态发言中的应用 (我的理解)
在多模态发言人识别 (MMSI) 的上下文中, 二次规划 (Quadratic Programming) 用于整合来自不同模型 (CNN & Roberta) 的信息, 并找到最佳的发言人分配方案.
这里的目标函数通常包括两部分:
- 基于视觉信息, CNN 输出
- 基于文本信息, Roberta 输出
通过优化这个组合目标函数, Solver 能够在满足一定约束条件的情况下, 分配最可能的发言人 (Speaker).
代码详解
主要步骤:
- 数据转化: 用与将 CNN 和 Roberta / Deberta 的模型输出转化为优化问题所需的格式
- 目标函数和约束的设定
- 优化问题的求解: 通过 Gurobi 求解器求解
- 优化过程: 确保只有一个发言人被选中
- 获取结果
数据转化
def convert_cnn_preds_to_matrix(frame_names_list, cnn_scores, label='pred'):
matrix_list, mappings_list = [], []
for frame_names in frame_names_list:
scores = [cnn_scores.get(frame_name, {}) for frame_name in frame_names]
speakers = set(sum([list(i.keys()) for i in scores], list()))
speaker_id_mappings = {speaker: i for i, speaker in enumerate(speakers)}
matrix = np.zeros((len(frame_names), len(speakers)))
for i, score_dict in enumerate(scores):
for speaker, score in score_dict.items():
matrix[i][speaker_id_mappings[speaker]] = score[label]
matrix_list.append(matrix)
mappings_list.append(speaker_id_mappings)
return matrix_list, mappings_list
- 输入: frame_names_list (帧名) 和 cnn_scores (CNN 预测分数)
- 映射: 将每个帧中出现的发言人分配一个索引, 映射到
speaker_id_mappings - 构建矩阵: 对于每个对话, 初始化一个全 0 矩阵, 行等于帧数, 列等于发言人数量. 遍历每个帧的 score, 根据映射将 speaker 对应的分数放到矩阵对应的位置
- 输出:
- 矩阵列表: 每个对话准话后的矩阵
- 映射列表: 每个对话 speaker 到索引的映射
目标函数和约束设定
def solve(cnn_scores, roberta_scores):
'''
cnn_scores: matrix of shape [n, m]
roberta_scores: matrix of shape [n, n]
where m = num_speakers, n = num_sents
'''
n, m = cnn_scores.shape
x = cp.Variable(np.prod(cnn_scores.shape), boolean=True)
constraints = []
for i in range(n):
constraints.append(cp.sum(x[i*m: i*m+m]) == 1)
cnn_objective = cnn_scores.reshape(-1).T @ x.T
new_roberta_scores = np.zeros((n*m, n*m))
for i in range(n):
for j in range(n):
for k in range(m):
new_roberta_scores[i*m+k, j*m+k] += roberta_scores[i, j]
roberta_objecive = cp.quad_form(x, new_roberta_scores) * (1/2)
objective = cnn_objective + roberta_objecive
problem = cp.Problem(cp.Maximize(objective), constraints)
problem.solve(solver='GUROBI')
return x.value.reshape(n, m), problem.status
- 变量定义: 定义决策变量
x, 是一个布尔型变量的数组, 其余长度等于cnn_scores矩阵的元素总数. 这个变量代表了每个句子选择每个发言人的决策 - CNN 目标函数:
cnn_objective是通过将cnn_scores矩阵展平鱼决策变量x的专职相乘得到的. 这部分代表了选择特定发言人的奖励 - Roberta 目标函数:
new_roberta_scores: n ∗ m × n ∗ m n*m \times n*m n∗m×n∗m, 该矩阵是对roberta_scores的扩展, 用于表示不同句子之间的相似度roberta_objective是通过对决策变量x应用二次形式得到的, 代表了选择相同发言人的奖励
- 总目标函数: 最终的目标函数
objective是和cnn_objective和roberta_objextive的和. 这个函数代表了在满足约束条件的前提下, 我们希望最大化的总奖励
约束条件的设定
constraints = []
for i in range(n):
constraints.append(cp.sum(x[i*m: i*m+m]) == 1)
约束定义: 对于每个句子 (共n个), 添加一个约束条件, 确保每个句子只能选择一个发言人. 具体实现为:
- 初始化约束李彪: 创建一个空列表
constraints, 用于存储所有的约束条件 - 循环添加约束: 对于每个句子
for i in range(n), 执行以下操作:x[i*m: i*m+m]: 是对决策变量x的一个切片操作, 选取与第i个句子相关的部分. 由于x是一个一维数组, 这个切片实际上选取了第i. 即每个句子只能选择一个发言人
- 添加到约束列表: 将每个句子的约束条件添加到
constraints列表中
CVXPY 和 Gurobi 求解
CVXPY
CVXPY 是 Python 的一个库, 用于构建和求解凸优化问题. 在多模态发言人识别的求解器中, CVXPY 被用来定义二次规划问题. 包括构建目标函数 (RNN 输出 + Roberta 输出), 以及定义约束条件 (一个发言人).

Gurobi
Gurobi 是一个强大的数学优化求解器, 广泛应用于工业和学术界和学术界. Gurobi 能够高效的求解各种类型的优化问题. 包括线性规划, 整数规划, 二次规划等. 在我们的 Solver 中, Gurobi 被用作 CVXPY 的后端求解器. 一单优化问题在 CVXPY 中被定义, Gurobi 就被用来实际求解这个问题, 找到最优解.

CVXPY 和 Gurobi 求解优化问题
定义决策变量:
x = cp.Variable(np.prod(cnn_scores.shape), boolean=True)
构建目标函数和约束:
- 上面说过了
创建优化问题:
problem = cp.Problem(cp.Maximize(objective), constraints)
求解优化问题:
problem.solve(solver='GUROBI')
处理求解结果:
return x.value.reshape(n, m), problem.status
Citation
Beasley, J. E. (1998). Heuristic algorithms for the unconstrained binary quadratic programming problem. ResearchGate. Retrieved from https://www.researchgate.net/publication/2661228
Vanderbei, R. J. (1999). LOQO: An interior point code for quadratic programming. Optimization Methods and Software, 11(1-4), 451-484. https://doi.org/10.1080/10556789908805759
Axehill, D. (2008). Integer quadratic programming for control and communication. DIVA. Retrieved from https://www.diva-portal.org/smash/record.jsf?pid=diva2:17358