kd-tree
参考:http://baike.baidu.com/link?url=Tz-F9IskzojgG85Wd72QvZdasPSSc5S6OomxGOn5V_uHh4w9mVuytAZrIQmnqmxt7YcGt3wNWWsTh802bYwwR_
k-d树 k-dimensional树的简称),是一种分割k维数据空间的数据结构。主要应用于多维空间关键数据的搜索(如:范围搜索和最近邻搜索)。K-D树是二进制空间分割树的特殊的情况。
1.背景。
SIFT算法中做特征点匹配的时候就会利用到k-d树。而特征点匹配实际上就是一个通过距离函数在高维矢量之间进行相似性检索的问题。
高维空间索引结构和近似查询的算法..
索引结构中相似性查询有两种基本的方式:
一种是范围查询(range searches),范围查询就是给定查询点和查询距离的阈值,从数据集中找出所有与查询点距离小于阈值的数据;
另一种是K近邻查询(K-neighbor searches)。K近邻查询是给定查询点及正整数K,从数据集中找到距离查询点最近的K个数据,当K=1时,就是最近邻查询(nearest neighbor searches)
特征匹配算子大致可以分为两类。
一类是线性扫描法,即将数据集中的点与查询点逐一进行距离比较,也就是穷举,缺点很明显,就是没有利用数据集本身蕴含的任何结构信息,搜索效率较低,
第二类是建立数据索引,然后再进行快速匹配。因为实际数据一般都会呈现出簇状的聚类形态,通过设计有效的索引结构可以大大加快检索的速度。索引树属于第二类,其基本思想就是对搜索空间进行层次划分。根据划分的空间是否有混叠可以分为Clipping和Overlapping两种。前者划分空间没有重叠,其代表就是k-d树;后者划分空间相互有交叠,其代表为R树。
2.例子。
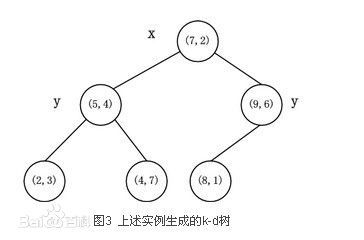
实例来介绍k-d树算法。假设有6个二维数据点{(2,3),(5,4),(9,6),(4,7),(8,1),(7,2)},数据点位于二维空间内。k-d树算法就是要确定图1中这些分割空间的分割线(多维空间即为分割平面,一般为超平面)

|
算法:构建k-d树(createKDTree)
|
|
输入:数据点集Data-set和其所在的空间Range
|
|
输出:Kd,类型为k-d tree
|
|
1.If Data-set为空,则返回空的k-d tree
|
|
2.调用节点生成程序:
(1)确定split域:对于所有描述子数据(特征矢量),统计它们在每个维上的数据方差。以SURF特征为例,描述子为64维,可计算64个方差。挑选出最大值,对应的维就是split域的值。数据方差大表明沿该坐标轴方向上的数据分散得比较开,在这个方向上进行数据分割有较好的分辨率;
(2)确定Node-data域:数据点集Data-set按其第split域的值排序。位于正中间的那个数据点被选为Node-data。此时新的Data-set' = Data-set\Node-data(除去其中Node-data这一点)。
|
|
3.dataleft = {d属于Data-set' && d[split] ≤ Node-data[split]}
Left_Range = {Range && dataleft} dataright = {d属于Data-set' && d[split] > Node-data[split]}
Right_Range = {Range && dataright}
|
|
4.left = 由(dataleft,Left_Range)建立的k-d tree,即递归调用createKDTree(dataleft,Left_
Range)。并设置left的parent域为Kd;
right = 由(dataright,Right_Range)建立的k-d tree,即调用createKDTree(dataright,Right_
Range)。并设置right的parent域为Kd。
|
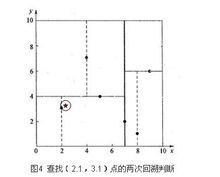
3,查找算法
先root--》叶——》root
-
从root节点开始,DFS搜索直到叶子节点,同时在stack中顺序存储已经访问的节点。
-
如果搜索到叶子节点,当前的叶子节点被设为最近邻节点。
-
然后通过stack回溯:如果当前点的距离比最近邻点距离近,更新最近邻节点.然后检查以最近距离为半径的圆是否和父节点的超平面相交.如果相交,则必须到父节点的另外一侧,用同样的DFS搜索法,开始检查最近邻节点。如果不相交,则继续往上回溯,而父节点的另一侧子节点都被淘汰,不再考虑的范围中.
-
当搜索回到root节点时,搜索完成,得到最近邻节点。
