数字图像处理笔记(十):形态学图像处理
1 - 引言
数学形态学的语言是集合论,利用集合论知识我们可以实现图像
- 腐蚀、膨胀
- 开操作、笔操作
下面就让我们学习一下这些基于形态学的图像处理
2 - 腐蚀和膨胀
膨胀与腐蚀能实现多种多样的功能,主要如下:
- 消除噪声
- 分割(isolate)出独立的图像元素,在图像中连接(join)相邻的元素。
- 寻找图像中的明显的极大值区域或极小值区域
- 求出图像的梯度
在进行腐蚀和膨胀的讲解之前,首先需要注意: 腐蚀和膨胀是对白色部分(高亮部分)而言的,不是黑色部分。 膨胀就是图像中的高亮部分进行膨胀,“邻域扩张”,效果图拥有比原图更大的高亮区域。腐蚀就是原图中高亮部分被腐蚀,“邻域被蚕食”,效果图拥有比原图更小的高亮区域。
2.1 - 图像的腐蚀操作
再来看一下腐蚀,,大家应该知道,膨胀和腐蚀是一对好基友,是相反的一对操作,所以腐蚀就是求局部最小值的操作,我们一般都会把腐蚀和膨胀对应起来理解和学习。下文就可以看到,两者的函数原型也是基本上一样的。
原理图: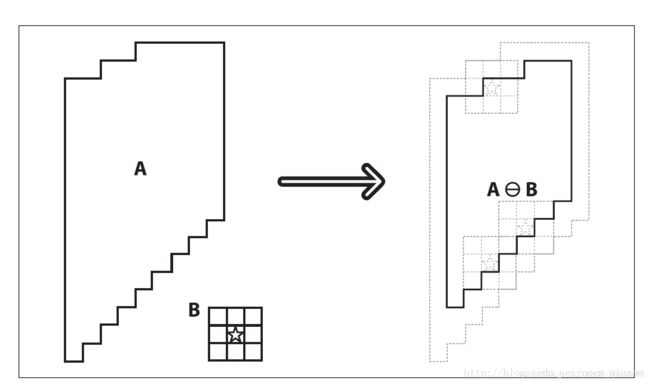
数学表达式:
d s t ( x , y ) = m i n ( x ′ , y ′ ) s r c ( x + x ′ , y + y ′ ) dst(x,y)=min_{(x^{'},y^{'})}src(x+x^{'},y+y^{'}) dst(x,y)=min(x′,y′)src(x+x′,y+y′)
python实现:
#coding=utf-8
import cv2
import numpy as np
img = cv2.imread('images/4.jpg',0)
#OpenCV定义的结构元素
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(3, 3))
#腐蚀图像
eroded = cv2.erode(img,kernel)
#显示腐蚀后的图像
cv2.imshow("Eroded Image",eroded);
cv2.imshow("Origin", img)
cv2.waitKey(0)
cv2.destroyAllWindows()

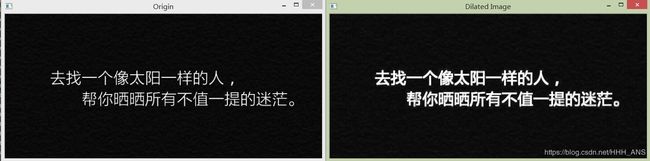
2.2 - 图像的膨胀操作
其实,膨胀就是求局部最大值的操作。
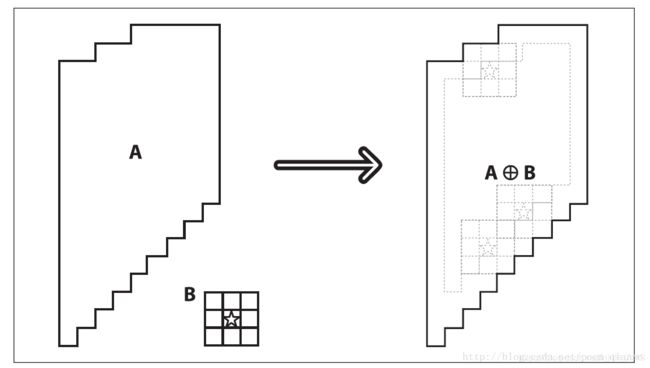
按数学方面来说,膨胀或者腐蚀操作就是将图像(或图像的一部分区域,我们称之为A)与核(我们称之为B)进行卷积。
核可以是任何的形状和大小,它拥有一个单独定义出来的参考点,我们称其为锚点(anchorpoint)。多数情况下,核是一个小的中间带有参考点和实心正方形或者圆盘,其实,我们可以把核视为模板或者掩码。
而膨胀就是求局部最大值的操作,核B与图形卷积,即计算核B覆盖的区域的像素点的最大值,并把这个最大值赋值给参考点指定的像素。这样就会使图像中的高亮区域逐渐增长。如下图所示,这就是膨胀操作的初衷
#coding=utf-8
import cv2
import numpy as np
img = cv2.imread('images/4.jpg',0)
#OpenCV定义的结构元素
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(3, 3))
#膨胀图像
dilated = cv2.dilate(img,kernel)
#显示膨胀后的图像
cv2.imshow("Dilated Image",dilated);
#原图像
cv2.imshow("Origin", img)
cv2.waitKey(0)
cv2.destroyAllWindows()
3 - 开运算和闭运算
开运算
先进性腐蚀再进行膨胀就叫做开运算,它被用来去除噪声
闭运算
先膨胀再腐蚀。它经常被用来填充前景物体中的小洞,或者前景物体上的小黑点。
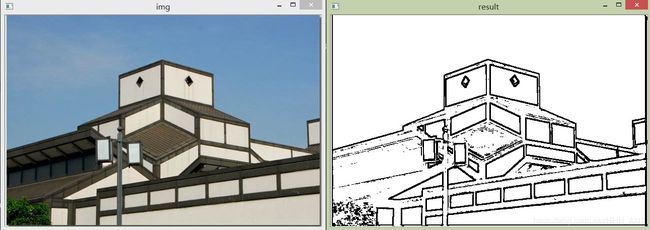
我们可以使用开、闭运算来检测边缘
形态学检测边缘的原理很简单,在膨胀时,图像中的物体会想周围“扩张”;腐蚀时,图像中的物体会“收缩”。比较这两幅图像,由于其变化的区域只发生在边缘。所以这时将两幅图像相减,得到的就是图像中物体的边缘。
#coding=utf-8
import cv2
import numpy
img = cv2.imread('images/17.jpg')
image = cv2.imread("images/17.jpg",0)
#构造一个3×3的结构元素
element = cv2.getStructuringElement(cv2.MORPH_RECT,(3, 3))
dilate = cv2.dilate(image, element)
erode = cv2.erode(image, element)
#将两幅图像相减获得边,第一个参数是膨胀后的图像,第二个参数是腐蚀后的图像
result = cv2.absdiff(dilate,erode);
#上面得到的结果是灰度图,将其二值化以便更清楚的观察结果
retval, result = cv2.threshold(result, 40, 255, cv2.THRESH_BINARY);
#反色,即对二值图每个像素取反
result = cv2.bitwise_not(result);
#显示图像
cv2.imshow('img',img)
cv2.imshow("result",result);
cv2.waitKey(0)
cv2.destroyAllWindows()