VIN1.视觉前端
VIN1.视觉前端
- 0.引言
- 1.流程
- 1.1.readImage()函数
- 2.主要视觉函数
- 2.1.包含的视觉算法
- 2.2.图像显示
- 3.数据结构
- 4.接入后端的数据结构
- 4.1.IMU
- 4.2.Image
- 5.疑问
0.引言
搬运工+自己阅读代码理解。
- 参考说明
pipeline如图:
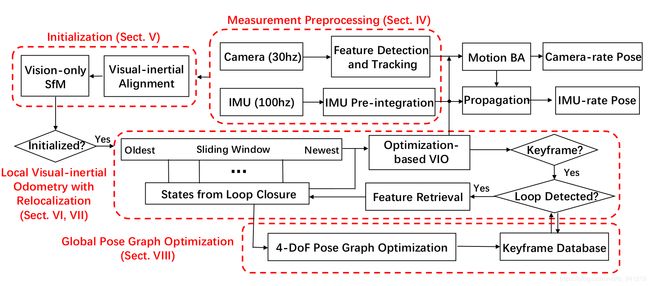
本节则是阅读总结Camera(30hz)-->Feature Detection and Tracking部分。主程序入口:feature_tracker_node.cpp;视觉跟踪:feature_tracker.cpp.
1.流程
每个相机都有一个FeatureTracker实例,即TrackeData[i],然后调用每个相机实例中的readImage()函数提取和跟踪特征点,然后将所有相机的特征点融合到feature_points(sensor_msgs::PointCloudPtr)中发布。FeatureTracker 类中最主要的成员函数是 readImage(),这里涉及到图像的3个img: prev_img 、cur_img、forw_img。cur_img 和 forw_img 分别是光流跟踪的前后两帧,forw_img 才是真正的当前帧,cur_img 实际上是上一帧,prev_img 是上一次发布的帧。prev_img 的用处是:光流跟踪后用 prev_img 和 forw_img 根据 Fundamental Matrix 做 RANSAC 剔除 outlier,也就是rejectWithF()函数。代码中NUM_OF_CAM为单双目标志,NUM_OF_CAM=1单目。
. 首先用cv::goodFeaturesToTrack在第一帧图像上面找最强的MAX_CNT=150个特征点,非极大值抑制半径为MIN_DIST=30。新的特征点都有自己的新的对应的id。然后在下一帧过来时,对这些特征点用光流法进行跟踪,在下一帧上找匹配点。然后对前后帧中这些匹配点进行校正。先对特征点进行畸变校正,再投影到以原点为球心,半径为1的球面上,再延伸到深度归一化平面上,获得最终校正后的位置。对于每对匹配点,基于校正后的位置,用F矩阵加ransac来筛选。然后再在匹配上的特征点之外的区域,用cv::goodFeaturesToTrack搜索最强的新的特征点,把特征点数量补上150个。
最后,把剩下的这些特征点,把图像点投影回深度归一化平面上liftProjective()(对于这个函数我也没弄明白,查了一下,参考,目前还没去细看),再畸变校正,再投影到球面上,再延伸到深度归一化平面上,得到校正后的位置。把校正后的位置发送出去(feature_points)。
特征点跟踪和匹配,就是前一帧到这一帧的,一帧帧继承下去。或者生成新的特征点。
1.1.readImage()函数
readImage()的作用是对新来的图像使用光流法进行特征点跟踪,处理流程为:
1.若控制参数 EQUALIZE 为真,则调用
cv::creatCLAHE()对输入图像做自适应直方图均衡;否则,不做处理。
2.调用
cv::calcOpticalFlowPyrLK()进行光流跟踪,跟踪前一帧的特征点 cur_pts 得到 forw_pts,根据 status 把跟踪失败的点剔除(注意 prev, cur, forw, ids, track_cnt都要剔除),而且还需要将跟踪到图像边界外的点剔除。
3.如果不需要发布当前帧的数据,那么直接把当前帧 forw 的数据赋给上一帧 cur,然后在这一步就结束。
4.如果需要发布当前帧的数据,先调用 rejectWithF()对 prev_pts 和 forw_pts 做RANSAC 剔除 outlier (调用 cv::findFundamentalMat()函数)。然后所有剩下的特征点的 track_cnt 加 1。
5.在跟踪过程中,为了保持跟踪到的特征点在当前帧图像中均匀分布(避免特征点扎堆的现象),会调用 FeatureTracker 类中的
FeatureTracker:;setMask()函数,先对跟踪到的特征点 forw_pts 按照跟踪次数降序排列(认为特征点被跟踪到的次数越多越好),然后遍历这个降序排列,对于遍历的每一个特征点,在 mask中将该点周围半径为MIN_DIST(30,30个像素周围内不再提取特征点)区域设置为 0,在后续的遍历过程中,不再选择该区域内的点。
6.由于跟踪过程中,上一帧特征点由于各种原因无法被跟踪,而且为了保证特征点均匀分布而剔除了一些特征点,如果不补充新的特征点,那么每一帧中特征点的数量会越来越少。所以,当前帧除了跟踪前一帧中的特征点,还会调用cv::goodFeaturesToTrack()在 mask 中不为 0 的区域提取新的特征点:
cv::goodFeaturesToTrack(forw_img, n_pts, MAX_CNT - forw_pts.size(), 0.01, MIN_DIST, mask);新提取特征点个数设置为MAX_CNT - forw_pts.size()个,MAX_CNT为150即每帧提取150个特征点。新提取的特征点通过 FeatureTracker::addPoints()函数 push 到 forw_pts 中,id 初始化为-1,track_cnt 初始化为 1。
借个图:


2.主要视觉函数
前端很多都是直接调用的opencv库函数。
2.1.包含的视觉算法
(1)CLAHE(Contrast Limited Adaptive Histogram Equalization)
cv::Ptr clahe = cv::createCLAHE(3.0, cv::Size(8, 8));
(2)Optical Flow(光流追踪)参考1;参考2
cv::calcOpticalFlowPyrLK(cur_img, forw_img, cur_pts, forw_pts, status, err, cv::Size(21, 21), 3);
(3)根据匹配点计算Fundamental Matrix, 然后用Ransac剔除不符合Fundamental Matrix的外点
cv::findFundamentalMat(un_prev_pts, un_forw_pts, cv::FM_RANSAC, F_THRESHOLD, 0.99, status);
(4)特征点检测:goodFeaturesToTrack, 使用Shi-Tomasi的改进版Harris corner
cv::goodFeaturesToTrack(forw_img, n_pts, MAX_CNT - forw_pts.size(), 0.1, MIN_DIST, mask);
(5)特征点排序:sort(),对光流跟踪到的特征点forw_pts,按照被跟踪到的次数从大到小排序
sort(cnt_pts_id.begin(), cnt_pts_id.end(), [](const pair> &a, const pair> &b)
{
return a.first > b.first; //xxx.first为track_cnt[i]跟踪次数
});
//遍历cnt_pts_id,构造mask,对关键点周围的点不再提取关键点
for (auto &it : cnt_pts_id)
{
if (mask.at(it.second.first) == 255)
{
//当前特征点位置对应的mask值为255,则保留当前特征点,将对应的特征点位置,id,被追踪次数分别存入forw_pts, ids, track_cnt
forw_pts.push_back(it.second.first);
ids.push_back(it.second.second);
track_cnt.push_back(it.first);
//在mask中将当前特征点周围半径为MIN_DIST的区域设置为0,后面不再选取该区域内的点
cv::circle(mask, it.second.first, MIN_DIST, 0, -1);
}
}
(6) liftProjective()函数
根据不同的相机模型将二维坐标转换到三维坐标:
对于CATA(卡特鱼眼相机)将像素坐标投影到单位圆内,这里涉及了鱼眼相机模型;
而对于PINHOLE(针孔相机)将像素坐标直接转换到归一化平面(z=1)并采用逆畸变模型(k1,k2,p1,p2)去畸变等。
特征点之间保证了最小距离30个像素,跟踪成功的特征点需要经过rotation-compensated旋转补偿的视差计算,视差在30个像素以上的特征点才会去参与三角化和后续的优化,保证了所有的特征点质量都是比较高的,同时降低了计算量。
2.2.图像显示
cv::Mat show_img;
cv::cvtColor(img, show_img, CV_GRAY2RGB);
if (SHOW_TRACK)
{
for (unsigned int j = 0; j < trackerData[0].cur_pts.size(); j++)
{
// 点为按照跟踪次数的排序,WINDOW_SIZE=10,(255 0 0)红色代表跟踪次数少于十次的(大多数),
//(0 0 255)蓝色代表跟踪次数大于十次的点
double len = min(1.0, 1.0 * trackerData[0].track_cnt[j] / WINDOW_SIZE);
cv::circle(show_img, trackerData[0].cur_pts[j], 2, cv::Scalar(255 * (1 - len), 0, 255 * len), 2);
}
cv::namedWindow("IMAGE", CV_WINDOW_AUTOSIZE);
cv::imshow("IMAGE", show_img);
cv::waitKey(1);//现实图像窗口
}
(255 0 0)红色点代表跟踪次数少于十次的(大多数),(0 0 255)蓝色代表跟踪次数大于十次的点,显然一般处于图像边缘部分。
3.数据结构
Frame 1: goodFeaturesToTrack 检测 MAX_CNT 个特征点,设置 forw_pts 如下:
第一帧的特征点:
| ids | forw_pts | track_cnt |
|---|---|---|
| 4 | [600,400] | 1 |
| 3 | [500,300] | 1 |
| 2 | [400,200] | 1 |
| 1 | [300,100] | 1 |
| 0 | [100,50] | 1 |
ids为根据跟踪次数排序后的序号;对应的点和上一帧一一匹配,forw_pts当前帧特征点坐标;track_cnt统计该点被跟踪的次数。
第二帧的特征点:
Frame 2: calcOpticalFlowPyrLK 跟踪,将跟踪失败的点删除,跟踪成功的点track_cnt跟踪计数+1,并调用 goodFeaturesToTrack 检测出 MAX_CNT - forw_pts.size()个特征点补全每帧的特征点个数,新检测的点ids赋值为-1,同时添加到forw_pts 中,并调用 updateID 更新 ids排序,最后得到的 forw_pts 如下:
| ids | forw_pts | track_cnt |
|---|---|---|
| 6 |
[200,150] |
1 |
| 5 |
[100,100] |
1 |
| 4 | [580,400] | 2 |
| 1 | [280,100] | 2 |
| 0 | [700,50] | 2 |
. 其中,ids为0、1、4的为成功跟踪的特征点,track_cnt计数相应+1,ids为2、3的特征点跟丢(将status为0的点,即使跟踪失败的点删除);ids为5、6的特征点为新检测加入的点track_cnt计数相应置1.代码 FeatureTracker::undistortedPoints()中 cur_un_pts 为归一化相机坐标系下的坐标,pts_velocity 为当前帧相对前一帧特征点沿 x,y 方向的像素移动速度。
4.接入后端的数据结构
4.1.IMU
imu_msg->header = dStampSec; //时间戳
imu_msg->linear_acceleration = vAcc;
imu_msg->angular_velocity = vGyr;
~ ~ ~
imu_buf.push(imu_msg); //IMU数据入栈!
4.2.Image
feature_points->header = dStampSec; //时间戳
~ ~ ~
if (trackerData[i].track_cnt[j] > 1)//有匹配的点才入栈!!!!
{
~ ~ ~
feature_points->points.push_back(Vector3d(x, y, z));
feature_points->id_of_point.push_back(p_id * NUM_OF_CAM + i);
feature_points->u_of_point.push_back(cur_pts[j].x);
feature_points->v_of_point.push_back(cur_pts[j].y);
feature_points->velocity_x_of_point.push_back(pts_velocity[j].x);
feature_points->velocity_y_of_point.push_back(pts_velocity[j].y);
}
~ ~ ~
feature_buf.push(feature_points); //Image数据处理后入栈!
其他数据结构参考.
5.疑问
进入后端后初步做一个IMU和Image对齐:getMeasurements()函数,使td个IMU数据与一个Image数据对齐,td的值是多少不是固定的,具体在哪儿实例化的没查到。
ImgConstPtr img_msg = feature_buf.front();
feature_buf.pop();
vector IMUs;
while (imu_buf.front()->header < img_msg->header + estimator.td) //td取值的策略????
{
IMUs.emplace_back(imu_buf.front());
imu_buf.pop();
}
真正封装至后端的数据结构:vector。