Pixhawk 添加光流
http://copter.ardupilot.com/wiki/common-px4flow-overview/
3、Connect to the Pixhawk
将Optical Flow Sensor连接到Pixhawk的4-Pin的IIC接口
4、Mounting to the Frame 安装到框架
使传感器垂直向下,X轴向前、Y轴向右。安装的过程中,应做好减振防护,以免角振动干扰图像。
5、Setup through the Mission Planner
将Pixhawk板子连接到Mission Planner,然后使能Initial Setup | Optional Hardware | Optical Flow菜单下的控制按钮,启动光流传感器。
另外通过将全局参数列表中的FLOW_ENABLE参数置1,也可以启动。当板子重启的时候,传感器就会初始化进入工作状态。
6、Testing the sensor
一些artificial光源的纹波会降低传感器的性能。自然光和高能白炽光源效果会好一些。
warning:当把光流传感器通过USB连接到电脑时,需要断开传感器和飞控板的连接,否则传感器会给飞控板供电,使得传感器不能达到有效的工作电压。3、重新连接IIC总线到飞控板,设置FLOW_ENABLE = 1、LOG_BITMASK = 131071,以便使能光流传感器,打开pre-arm(配对;锁定) logging用以帮助诊断错误。
4、通过USB线给飞控板供电,开始日志存储,保证光流传感器指向下方的同时,转动vehicle (设备)。
5、下载dataflash logs,将”Qual”,flowX,flowY,bodyX,bodyY的值,用图形显示。quality 的读数应该大于0,并且需要注意flow和body的变化速率。
6、通过电池给设备上电,重复步骤4和5。如果电池供电不工作,但是USB供电时,设备正常工作,那就先用USB供电。
DisarmedLogging 非锁定 disarm:解除;缴械
7、Flow Sensor Calibration(校准)
1、寻找一个纹理明显、照明良好(自然光或白炽灯光)的地方
2、转动Propellers (螺旋桨)
3、给设备上电,将设备抬起,使传感器与眼睛在一个平面
4、在横滚角方向在1秒的时间内,从-15到+15度的范围内转动设备,来回重复10次。通过闭上一只眼睛,你就可以保证在转动的过程中,让传感器的中心和地面的相对位置保持不变。
5、在俯仰角方向重复步骤4的动作。
6、下载data flash logs,像下图一样用曲线表示OF.flowX, OF.bodyX 和IMU.GyrX 数据
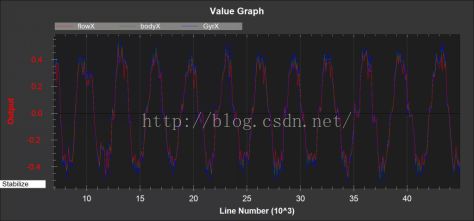
7、如果OF.flowX比OF.bodyX大或者小,那么可以通过修改FLOW_FXSCALER参数,进行调整。
8、如果OF.bodyX与IMU.GyrX的数据不相关或者符号相反,那么FLOW_ORIENT_YAW的参数设置可能错误或者没有让光流传感器指向地面。
9、像下图一样用曲线表示OF.flowY, OF.bodyYband和IMU.GyrY 数据
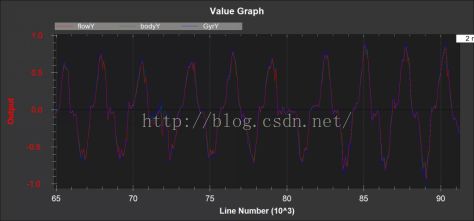
10、如果OF.flowY比OF.bodyY大或者小,那么可以通过修改FLOW_FYSCALER参数,进行调整。
11、如果OF.bodyY与IMU.GyrY的数据不相关或者符号相反,那么FLOW_ORIENT_YAW的参数设置可能错误或者没有让光流传感器指向地面。
8、Range Sensor Check超声传感器检查
检查flow sensor calibration测试flashlog中的EKF5.mesRng信息。Check the following:
1、有连续的range(范围)测试数据。
It outputs a range on the ground that is 10cm of the expected value (remember that measured range will increase when you roll or pitch the vehicle because the laser is then measuring on a slant)传感器输出范围在10cm的预期范围附近(当你在俯仰或横滚方向转动设备的时候,超声传感器在倾斜方向测试距离)
10、Pre-Arm checks
To allow arming and taking off in Loiter without a GPS the GPS arming check should be turned off as shown below. Unchecking “All” and “GPS” and leave all other options checked.

因为光流设备需要精准的超声距离数据,因此需要进行额外的pre-arm check。设备在disarmed (非配对、非锁定)的情况下,我们需要将设备垂直抬高到至少50cm但是小于2米的位置。
The error message when arming fails this check is “PreArm: check range finder”当这项检测失败时,会输出“PreArm: check range finder”的信息。通过取消勾选“Parameter/Sonar” 可以跳过这项检测。
11、First Flight (Copter Only)
1、设置参数EKF_GPS_TYPE为0(意味着光流数据不进行扩展卡尔曼滤波),在50厘米到3米的高度内进行小倾斜角的稳定悬停测试。
2、下载flash log,将以下数据绘制在mission planner中。
3、EKF5.meaRng应该与设备高度的变化相关联。
4、OF.flowX和OF.flowY应该时刻变化。
5、OF.bodyX、OF.bodyY应该和IMU.GyrX、IMU.GyrY相一致。
12、Second Flight (Copter only)
1、设置EKF_GPS_TYPE参数为3,使得EKF使用光流的数据取代GPS数据。warning:Do not switch from any non-gps mode, eg STABILIZE(手控模式), ALT_HOLD(定高模式,通过增减油门,仍然可以调控高度) or ACRO to a GPS mode, eg LOITER(当松手控制机时,定点悬停) when flying with EKF_GPS_TYPE set to 3.
2、在控制器上设置LOITER模式和STABILIZE模式开关
3、在loiter模式下起飞,让设备悬停在1m左右的高度。
warning:Do not take-off in STABILIZE and switch to LOITER
4、如果飞行器加速漂离或者紊乱的俯仰、横滚运动,将飞行器设置到stabilise模式,然后降落。下载日志文件,寻找问题。
5、如果飞行器能够保持悬停,就可以体验在LOITER模式下的定点测量If it holds location then congratulations, you have succeeded and can now start experimenting with height changes and moving it around in LOITER