树莓派&ROS:安装系统 Raspbian、ROS2GO和ROS Kinectic
树莓派&ROS:安装系统 Raspbian、ROS2GO和ROS Kinectic
【目录】
- 1、树莓派硬件组装
- 1.1 采购树莓派开发板
- 1.2 采购树莓派外壳与电源
- 1.3 组装树莓派成品如下
- 2、树莓派安装官方Raspbian系统与调试
- 2.1 TF卡格式化与安装系统镜像
- 2.2 Raspbian系统调试与优化
- 3、ROS2GO系统
- 3.1 系统介绍
- 3.2 进入系统
- 3.2 测试ROS,让小海龟跑起来
- 4、树莓派安装ROS Kinectic系统
- 4.1 解压并烧录系统镜像
- 4.2 在树莓派系统上测试ROS
树莓派买回来,至少还是想尝试一下官方的Raspbian系统,然后再装ROS系统。一个TF卡(8G足够)可以装Raspbian系统,一个16G的TF卡安装ROS系统。
在PC机上无论是安装双系统,还是虚拟机装Ubuntu都有很多坑,所以花钱买方便买了一个ROS2GO系统的U盘。
最后,在树莓派上安装ROS Kinetic镜像,将小海龟跑起来~~
1、树莓派硬件组装
1.1 采购树莓派开发板
(1)在这家淘宝店购买开发板和TF卡
https://item.taobao.com/item.htm?spm=a1z09.2.0.0.25932e8duhOGWS&id=535894042489
收到货后,TF卡已安装Raspbian系统,直接可以使用,不过不是最新的,没有视频播放器。
送的资料很多,只是入门有点摸不着头绪
(2)可以考虑第二家,有个“黑科技U盘系统套餐” https://item.taobao.com/item.htm?spm=a1z2k.11010449.931864.360.52dd509dS64YOE&scm=1007.13982.82927.0&id=527630316715
另:TF卡插开发板上,来回插拔不方便,可以考虑U盘启动系统
抛弃SD卡,使用U盘启动树梅派3
来自 <https://www.jianshu.com/p/9fe7b427ec9a>
1.2 采购树莓派外壳与电源
(1)树莓派外壳
带双风扇的铝合金金属外壳,散热能力充足
https://item.taobao.com/item.htm?spm=a1z09.2.0.0.6f602e8dfK326o&id=568170482667&_u=2efkhaj8a35
(2)电源适配器5V 3A,USB线带开关
树莓派3B+至少需要2A电源,用3A的电源适配器,至少不会电流不够了
https://item.taobao.com/item.htm?spm=a1z09.2.0.0.6f602e8dfK326o&id=564290810815&_u=2efkhajef4e
1.3 组装树莓派成品如下

2、树莓派安装官方Raspbian系统与调试
2.1 TF卡格式化与安装系统镜像
(1)正常安装
需要一个烧录软件用于将系统镜像烧录到 tf 卡上面,我们可以使用 Etcher 来完成操作。
Etcher 官网: https://www.balena.io/etcher/
参考1:树莓派3B 开箱配置
来自 https://www.jianshu.com/p/2c3681cd5569
(2)TF卡格式化:使用SDFormatter4将TF卡格式化
参考2:树莓派3B+折腾记 篇一:入门折腾—系统安装
来自 https://post.smzdm.com/p/738951/
(3)无法格式化时,使用硬盘低级格式化工具(Hard Disk Low Level Format Tool)当使用SDFormatter对TF卡尝试格式化时程序提示“你所选择的存储媒介处于禁止写入状态”
来自 <http://www.voidcn.com/article/p-usdjilpd-bqg.html>
(4)下载并烧录系统镜像
树莓派系统下载
https://www.raspberrypi.org/downloads/raspbian/
我选择的是第一个系统(2018-11-13-raspbian-stretch-full),应该算是Stretch版本吧。
有各种配套软件(包含视频播放器),用Etcher安装到TF卡上。
2.2 Raspbian系统调试与优化
树莓派插上TF卡(已烧录系统镜像),HDMI线连接显示器,连接鼠标与键盘,就可以启动系统了。
基本的日常应用都可以满足,上网看视频,打开U盘文件,还可以编程

使用系统自带的树莓派配置系统来扩展文件系统,
打开命令终端图标,或Ctrl+Alt+t,输入以下命令:sudo raspi-config
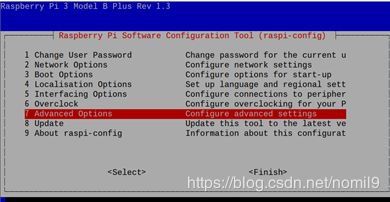
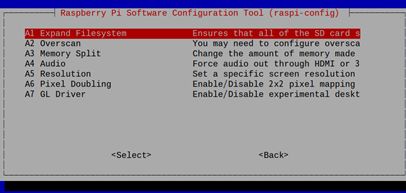
(1)扩展存储空间
将跟分区扩展到整张SD卡(树莓派控制器默认是不使用SD卡的全部空间,有一部分的保留,此项目建议选中,可以释放更多的空间,16G卡释放后大概会有11G左右的剩余空间,如果不进行释放的话,大概只有2.9G的空间)。
(2)打开SSH
进入网络设置,选择SSH ,设置为enable
(3)设置音频输出
进入Advanced Options 高级设置
选择 A6 Audio 选择声音默认输出到模拟口
1 Force 3.5mm ('headphone') jack强制输出到3.5mm模拟口
来自 <http://blog.51cto.com/970076933/1867347>
(4)安装拼音输入法
安装拼音输入法:
sudo apt-get install scim-pinyin
安装拼音输入后,输入法候选框出现黑框,原因为Fcitx安装的BUG
按以下方法解决:用 sudo apt remove fcitx-module-kimpanel 命令
把fcitx-module-kimpanel删掉,重启即可。
参考:Ubuntu安装Fcitx以及Fcitx输入中文不显示候选词框的解决办法http://blog.csdn.net/qq_21397217/article/details/52447263
3、ROS2GO系统
3.1 系统介绍
ROS2GO系统是个装在U盘(64G,高速U盘通过认证的)里面的Ubuntu系统,已集成ROS和开发常用的软件,不用在电脑上装系统,避免各种装驱动的问题。
当然也不便宜,原价600,优惠100也要500,淘宝店铺地址:
https://item.taobao.com/item.htm?spm=a1z09.2.0.0.3ab62e8dMd8tlb&id=581432149596&_u=2efkhajaecf
先管账户ROS小课堂领取优惠券,再去淘宝购买。
我选择的是ROS小课堂版本,资料偏向于无人车方向,古月老师的偏向于机械臂,张瑞雷老师版本的不清楚。
参考:ROS2GO系统简介
来自 <http://www.corvin.cn/990.html>
预装软件:Ubuntu16.04 + ROS Kinetic
启动方式: Tianbot ROS2GO HDD支持UEFI
3.2 进入系统
快速步骤:
第一步:保持PC关闭并将ros2go闪存驱动器插入USB3.0端口。
第二步:启动PC并将启动设备更改为UEFI:TIANBOT ROS2GO 1.00
第三步:在Grub中选择第一个选项Ubuntu,回车!
第四步:进入桌面,打开《ROS2GO使用文档》,开始ROS!
(最后一步坑了我好久,找半天没找到这个文档,最后发现是在浏览器里面)
来自 <https://github.com/tianbot/ros2go/blob/master/01_%E4%BA%A7%E5%93%81%E4%BB%8B%E7%BB%8D_introduction.md>
3.2 测试ROS,让小海龟跑起来
按照下文的方法《开始使用ROS》:
https://github.com/tianbot/ros2go/blob/master/10_%E5%BC%80%E5%A7%8BROS_start_with_ros.md
4、树莓派安装ROS Kinectic系统
现在手上有了一个树莓派Raspbian系统和一个U盘安装的Ubuntu系统,
下面可以安装ROS Kinectic镜像。
我选择的是基于 Raspbian Stretch系统的ROS Kinetic版,
当然还有基于Raspbian Jessie系统的ROS Indigo版。
17年中,树莓派官方从Jessie系统升级到了Stretch系统。
主要参考以下文档:
【发布v1.0版本基于Stretch的ROS Kinetic完整版树莓派3B+镜像】
http://www.corvin.cn/948.html
其它选择:
发布v1.2版本基于Jessie的ROS Indigo完整版树莓派3B镜像
http://www.corvin.cn/490.html
4.1 解压并烧录系统镜像
百度网盘,下载镜像压缩文件: https://pan.baidu.com/s/1nIankz8xg6xLrqIhGdWZLA
由于镜像文件是被压缩的,插入ROS2GO的U盘进入Ubuntu系统,
找到文件,右键点击properties找到文件目录
/media/tianbot/资料/image/
Ctrl+Alt+t打开终端,输入以下命令解压文件:
xz -dkv /media/tianbot/资料/image/stretch_ros_kinetic_desktop_full_v1_0.img.xz
ROS小课堂中的挂载SD卡太麻烦,直接回到Windows系统,继续用Etcher软件,将解压的IMG文件烧录到TF卡(16G)中.
中文拼音输入有问题,参考前面的解决方法。
4.2、使用VNC远程连接树莓派
系统默认的用户名是corvin,默认的密码也是corvin。
对于root用户的密码也是corvin。
系统已经默认开启了ssh-server和vnc-server,方便进行ssh终端连接和vnc远程桌面连接了。
使用VNC远程连接树莓派,vnc分辨率设置
https://blog.csdn.net/MENGHUANBEIKE/article/details/78065391
4.3、在树莓派系统上测试ROS
好不容易把小海龟跑起来,鼓掌~~
主要参考以下文档:Ubuntu16.04安装ROS ---(小白篇)
来自 <https://blog.csdn.net/WY_star1/article/details/81564319>
打开terminal,来敲命令:
1)启动ROS MASTER:
roscore
显示 started core service [/rosout]顺利进行下一步
要是没有,再重新来一次
2)重新打开一个terminal,启动小海龟仿真器:
rosrun turtlesim turtlesim_node
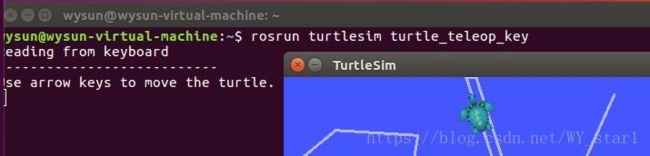
3)重新打开一个终端哦,开启控制节点:
rosrun turtlesim turtle_teleop_key
选中我们的控制窗口,按方向键就可以指挥小海龟
(4)打开一个界面,看一下ROS的图形化界面,展示一下结点关系:
rosrun rqt_graph rqt_graph
(5)测试OK,ROS安装没有问题