ROS理论与实践(以移动机器人为例)连载(七) ——机器人语音交互
文章目录
- 1. 科大讯飞开放平台使用简介
- ①如何使用科大讯飞开放平台
- ②对SDK中提供的源码进行简要分析
- 2. ROS语音识别与语音输出
- ①语音识别
- - 具体实现
- ②语音输出
- - 具体实现
- ③语音识别和语音合成的匹配
- 3. ROS机器人语音交互
1. 科大讯飞开放平台使用简介
①如何使用科大讯飞开放平台
- 登录/注册 科大讯飞开放平台;
- 打开控制台创建新应用;
- 语音听写和语音合成SDK下载;
- 包含五个文件夹:
- bin: 最后生成的可执行文件
- doc: API的使用文档和说明手册
- include: 头文件
- libs: 语音识别相关的链接库文件
- samples: 例程
- iat_online_record_sample:语音听写的例程包
- tts_online_sample:语音输出,将某个字符串通过语音生成
- 编译iat_online_record_sample
如果报错:
linuxrec.c:12:28: fatal error: alsa/asoundlib.h: No such file or directory
则执行
sudo apt-get install libasound2-dev
- 执行bin文件夹目录下的可执行文件; 选择不提供使用者词库,麦克风输入音频;

- 编译tts_online_sample并执行可执行文件; 会生成一个Wav文件,里面是对科大讯飞的介绍;
②对SDK中提供的源码进行简要分析
我们可以打开iat_online_record_sample文件夹下的iat_online_record_sample.c文件(由于文件300多行这里就不粘贴了),熟悉一下里面核心的API。
大体上main函数里包括这些:
- 对appid的配置;
- 登录用户名;
- 上传用户的words列表;
- 选择语音从哪里来;
- demo_mic函数具体实现识别功能。
demo_mic:
static void demo_mic(const char* session_begin_params)
{
int errcode;
int i = 0;
struct speech_rec iat;
struct speech_rec_notifier recnotifier = {
on_result,
on_speech_begin,
on_speech_end
};
errcode = sr_init(&iat, session_begin_params, SR_MIC, &recnotifier);
if (errcode) {
printf("speech recognizer init failed\n");
return;
}
errcode = sr_start_listening(&iat);
if (errcode) {
printf("start listen failed %d\n", errcode);
}
/* demo 15 seconds recording */
while(i++ < 15)
sleep(1);
errcode = sr_stop_listening(&iat);
if (errcode) {
printf("stop listening failed %d\n", errcode);
}
sr_uninit(&iat);
}
我们需要关注里面的 on_result 的结果是如何发布的:
void on_result(const char *result, char is_last)
{
if (result) {
size_t left = g_buffersize - 1 - strlen(g_result);
size_t size = strlen(result);
if (left < size) {
g_result = (char*)realloc(g_result, g_buffersize + BUFFER_SIZE);
if (g_result)
g_buffersize += BUFFER_SIZE;
else {
printf("mem alloc failed\n");
return;
}
}
strncat(g_result, result, size);
show_result(g_result, is_last);
}
}
从代码中我们猜想只要拿到这里的 g_result 这个全局变量就可以拿到最终的识别结果。
再来看一看tts_online_sample.c中的代码,text_to_speech是语音合成关键的函数:
const char* filename = "tts_sample.wav"; //合成的语音文件名称
const char* text = "亲爱的用户,您好,这是一个语音合成示例,感谢您对科大讯飞语音技术的支持!科大讯飞是亚太地区最大的语音上市公司,股票代码:002230"; //合成文本
ret = text_to_speech(text, filename, session_begin_params);
通过这些代码结合用户登录和函数text_to_speech等,将text内的文字转换成了语音保存到了filename的文件中。
当然,我们可以修改代码,将语音直接输出出来。在文件末173行左右:
printf("合成完毕\n");
popen("play tts_sample.wav","r");
//就是这句话很关键,但是需要提前确认Linux系统可以使用play
所以我们安装play相关的工具:(第一句话因SDK包名而异)
$ cd cd Linux_iat1227_tts_online1227_5e9199eb/libs/x64
$ sudo cp libmsc.so /usr/lib/
$ sudo apt install sox
$ sudo apt install libsox-fmt-all
科大讯飞的SDK带有ID号,每个人每次下载后的ID都不相同,更换SDK之后需要修改代码中的APPID。APPID可以在SDK包的名字后几位可以看到。
2. ROS语音识别与语音输出
①语音识别
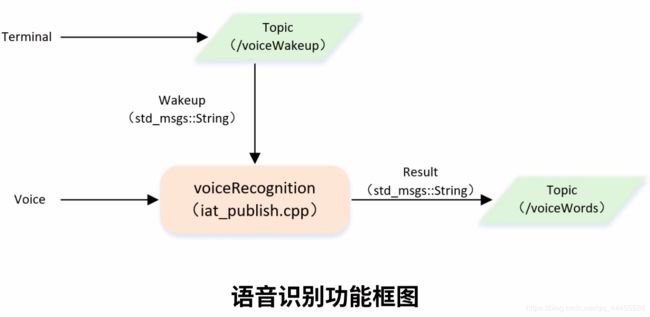
通过修改上面提供的SDK源码文件,改成可以在ROS环境下使用的功能包,达成语音识别的目的。这个功能框图,描述了我们将通过一个唤醒词,就像“Hi Siri”一样,这里通过一个std_msgs::String的话题消息唤醒语音识别的功能,而不是执行一次./iat_online_record_sample识别一次;随后通过Result将识别后的文字包装成话题发布出去,可供其他操作者调用。
- 具体实现
- subscriber:接收唤醒信号,将wakeupFlag变量置位;
- publisher:主循环中调用SDK的语音识别功能,识别成功后置位resultFlag变量,将识别出来的字符串发布。
步骤:
- 创建功能包;
- 将SDK内的头文件复制粘贴在新创建的功能包内,包括include文件夹内的和samples/iat_online_record_sample文件夹下的.h文件;
- 将samples/iat_online_record_sample文件夹下的iat_online_record_sample.c,linuxrec.c和speech_recognizer.c文件放入新建功能包的src文件夹目录下,并把iat_online_record_sample.c文件扩展名改为cpp,因为我们将用到C++的语法;并创建launch文件夹;
- 修改iat_online_record_sample.cpp文件,这里我们可以发现ROS可以通过其他不同平台的已经实现功能的代码,经过修改达成ROS机器人使用的目的。
这里我把iat_publish.cpp全部代码都粘贴到了页面上,大家可以对比下载下来的SDK中iat_online_record_sample.c文件。多数代码都是讯飞提供的SDK的内容,我会解读其中修改的重要的部分:(解读的部分都由注释放置到对应的位置)
/*
* 语音听写(iFly Auto Transform)技术能够实时地将语音转换成对应的文字。
*/
#include 好了,那我们现在开始配置编译文件CMakeLists.txt。我们需要开启c++11和头文件包含
add_definitions(-std=c++11)
include_directories(
${catkin_INCLUDE_DIRS}
include
)
并对三个c/c++文件添加可执行文件和链接库依赖
add_executable(iat_publish
src/iat_publish.cpp
src/speech_recognizer.c
src/linuxrec.c)
target_link_libraries(
iat_publish
${catkin_LIBRARIES}
libmsc.so -ldl -lpthread -lm - lrt -lasound
)
这里需要注意需要把speech_recognizer.c和linuxrec.c中的包含的头文件(在robot_voice/include/robot_voice目录下的那几个),修改为include “robot_voice/{文件名}”。
②语音输出

- 具体实现
- subscriber: 订阅voiceWords话题,接收输入的字符串;
- voiceWordsCallback: 使用SDK接口将字符串转换成中文语音。
步骤:
- 将tts_online_sample.c文件复制粘贴到/robot_voice/src目录下,改名为tts_publish.cpp;
- 修改该文件。头文件我们都是已经放置好了。
文件我也全部粘贴到了这里,同样和SDK中的原文件进行比对。重要的部分同样在代码中指定位置注释:(和上个例子相似的地方就不做解释了)
/*
* 语音合成(Text To Speech,TTS)技术能够自动将任意文字实时转换为连续的
* 自然语音,是一种能够在任何时间、任何地点,向任何人提供语音信息服务的
* 高效便捷手段,非常符合信息时代海量数据、动态更新和个性化查询的需求。
*/
#include 代码无法直接使用的原因是APPIP没有修改,按照上面提示的APPIP的修改方式改一下就好了。
需要对该文件进行编译,编译文件这样改:
add_executable(tts_subscribe src/tts_subscribe.cpp)
target_link_libraries(
tts_subscribe
${catkin_LIBRARIES}
libmsc.so -ldl -pthread
)
emmm…效果图都是语音就没法发GIF了。
③语音识别和语音合成的匹配
即我说一句,机器人说一句。

由于我们上述的两段代码都是使用的统一话题名,即voiceWords,有语音识别发布,语音合成订阅,所以我们可以写一个launch文件将两个功能都包含进去。
<launch>
<node name="iat_publish" pkg="robot_voice" type="iat_publish" output="screen"/>
<node name="tts_subscribe" pkg="robot_voice" type="tts_subscribe" output="screen"/>
launch>
还是可以发个哑巴图哈~大概能看出来
3. ROS机器人语音交互

这里的VoiceAssistant会识别你说出的关键词,输出匹配用户询问的回复。我们同样还使用的tts_online_sample.c文件更名为voice_assistant.cpp并对内容进行修改。
这里我们主要更改的是回调函数中的内容,其他内容和语音合成部分的示例代码相同。
更改部分:
std::string to_string(int val)
{
char buf[20];
sprintf(buf, "%d", val); //格式化输出字符,将输出的字符存入buf中
return std::string(buf);
}
void voiceWordsCallback(const std_msgs::String::ConstPtr& msg)
{
char cmd[2000];
const char* text;
int ret = MSP_SUCCESS;
const char* session_begin_params = "voice_name = xiaoyan, text_encoding = utf8, sample_rate = 16000, speed = 50, volume = 50, pitch = 50, rdn = 2";
const char* filename = "tts_sample.wav"; //合成的语音文件名称
std::cout<<"I heard :"<<msg->data.c_str()<<std::endl;
std::string dataString = msg->data;
if(dataString.find("你是谁") != std::string::npos
|| dataString.find("名字") != std::string::npos)
{
char nameString[100] = "我是你的语音小助手,你可以叫我小R";
text = nameString;
std::cout<<text<<std::endl;
}
else if(dataString.find("你几岁了") != std::string::npos
|| dataString.find("年龄") != std::string::npos)
{
char eageString[100] = "我已经四岁了,不再是两三岁的小孩子了";
text = eageString;
std::cout<<text<<std::endl;
}
else if(dataString.find("你可以做什么") != std::string::npos
|| dataString.find("干什么") != std::string::npos)
{
char helpString[100] = "你可以问我现在时间";
text = helpString;
std::cout<<text<<std::endl;
}
else if(dataString.find("时间") != std::string::npos)
{
//获取当前时间
struct tm *ptm;
long ts;
ts = time(NULL);
ptm = localtime(&ts);
std::string string = "现在时间" + to_string(ptm-> tm_hour) + "点" + to_string(ptm-> tm_min) + "分";
char timeString[40] = {0};
string.copy(timeString, sizeof(string), 0);
text = timeString;
std::cout<<text<<std::endl;
}
else
{
text = msg->data.c_str();
}
/* 文本合成 */
printf("开始合成 ...\n");
ret = text_to_speech(text, filename, session_begin_params);
if (MSP_SUCCESS != ret)
{
printf("text_to_speech failed, error code: %d.\n", ret);
}
printf("合成完毕\n");
popen("play tts_sample.wav","r");
sleep(1);
}
这里使用了string::find()函数: 是一个字符或字符串查找函数,该函数有唯一的返回类型,即string::size_type,即一个无符号整形类型,可能是整数也可能是长整数。如果查找成功,返回按照查找规则找到的第一个字符或者子串的位置;如果查找失败,返回string::npos,即-1(当然打印出的结果不是-1,而是一个很大的数值,那是因为它是无符号的)。
然后我们再补充一个launch文件,启动了语音识别和语音助手:
<launch>
<node name="iat_publish" pkg="robot_voice" type="iat_publish" output="screen"/>
<node name="voice_assistant" pkg="robot_voice" type="voice_assistant" output="screen"/>
launch>
切记!使用是需要发布唤醒词,唤醒语音识别!就是在语音识别里subscribe的voiceWakeup这个话题。
其实基于这些就可以和机器人做很多交互了,比如用户说一个指令,机器人做运动,并且还可以回复命令者等等。