【VIO笔记(学习VINS的必备基础)】第五讲(1/2) 手写VIO后端
文章目录
- 非线性最小二乘问题求解:solver
- 单目BA代码部分
系列教程来自某学院,侵权删除。
学习完这一系列课程再去看VINS才能做到不吃力,不然直接撸网上的各种VINS解析完全云里雾里-_-!
非线性最小二乘问题求解:solver
回忆上一讲的内容,最小二乘的系统可以表示为:
其中 ξ \xi ξ是状态量,r表示残差, Σ i \Sigma_i Σi表示协方差。求解这个最小二乘实际上最后会落到迭代求下面这个正定方程:
在上一讲里我们把它写成了连加形式,便于理解:

而要求解这个方程,直接取H的逆计算量大,上一讲提到使用舒尔补来求逆,具体来说,考虑纯视觉的BA问题,我们可以把 H Δ x = b \mathbf H\Delta x=b HΔx=b写成:
其中,下标p表示pose,下标l表示landmark,那么求 Δ x \Delta x Δx的问题可以看成分别求 Δ x p ∗ \Delta x_p^* Δxp∗和 Δ x l ∗ \Delta x_l^* Δxl∗,再拼接起来。例如我们先求 Δ x p ∗ \Delta x_p^* Δxp∗,利用舒尔补把H矩阵化为下三角:
[ H p p ′ 0 X X ] [ Δ x p ∗ Δ x l ∗ ] = [ − b p ′ − b l ′ ] \begin{bmatrix} H_{pp}' & 0 \\ X & X \end{bmatrix}\begin{bmatrix} \Delta x_p^* \\ \Delta x_l^* \end{bmatrix}=\begin{bmatrix} -b_p' \\ -b_l' \end{bmatrix} [Hpp′X0X][Δxp∗Δxl∗]=[−bp′−bl′]
对应的等式右边b也会发生变化,在这里等式左边H矩阵下面两项X的值不重要,使用第一行乘 Δ x \Delta x Δx可以得到变化后的b’,如下:
![]()
那么 Δ x p ∗ \Delta x_p^* Δxp∗可以表示为左边矩阵的逆乘等式右边,而这个矩阵的维度与之前的H相比降低了很多,方便求解,因为原H矩阵用图表示为下:
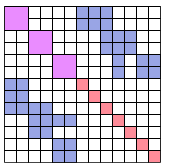
左上角是相机姿态,一个滑动窗口内只有十几个,而路标点往往会达到几百个,所以可以减少整个的计算量,得到了 Δ x p ∗ \Delta x_p^* Δxp∗后,通过原始的式子可以计算出 Δ x l ∗ \Delta x_l^* Δxl∗:
![]()
这样就计算出了整个 Δ x \Delta x Δx,那么接下来我们回顾一下求解器的整体流程图:
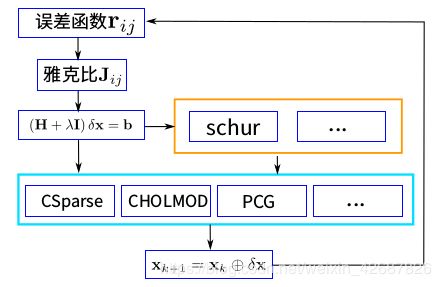
首先我们要确定误差函数r以及它的雅克比矩阵J,这个在第三讲里面已经讨论过了,之后我们利用最小二乘法求状态量的最佳估计,可以使用舒尔补等方法来进行计算,对于不是slam的问题会使用蓝色框里的一些方法来迭代求解,最后进行不断的迭代直到得到 x ∗ x^* x∗。
最后我们要说一下求解过程中的一些问题,我们知道H矩阵通常不满秩,求解时无法直接求逆,所以我们使用LM法时,由于要添加一个阻尼因子,可以使得H矩阵满秩,然而由于相机都是相对的估计,所以会出现零空间变化的问题,通俗的说其优化后的轨迹的零点可能不是真实空间中的零点,为了解决这个问题,有以下几种方法:
1、添加先验。假设第一帧的x为零点,为了使其不会变化,我们给第一个pose的信息矩阵H加上一个单位阵I,即 H [ 11 ] + = I \mathbf H_{[11]}+=\mathbf I H[11]+=I,这样一来在展开的时候就有 I Δ x = 0 \mathbf I\Delta x=0 IΔx=0,这样这一个 Δ x \Delta x Δx就只能为零了。
2、设定对应雅克比矩阵为 0,意味着残差等于 0. 求解方程为(0 + λI) Δ x \Delta x Δx = 0,只能 Δ x \Delta x Δx = 0。
下面进入代码时间:
单目BA代码部分
这里的程序已经在github上开源:VINS-Course
首先我们手写一个后端来解决一个单目BA问题,代码的框架与g2o类似,可以分为顶点(vertex)、边(edge)、求解器(solver)三部分,顶点代表各个状态量,边代表残差、雅克比的计算、对应顶点的保存等等,求解器则负责计算正定方程等等。
整个代码的结构如下:
app放置应用问题的函数,例如这里是slam的BA问题,backend里涵盖后端的相应库函数,我们先来看BA问题:
/*
* Frame : 保存每帧的姿态和观测
*/
struct Frame {
Frame(Eigen::Matrix3d R, Eigen::Vector3d t) : Rwc(R), qwc(R), twc(t) {};
Eigen::Matrix3d Rwc;
Eigen::Quaterniond qwc;
Eigen::Vector3d twc;
unordered_map<int, Eigen::Vector3d> featurePerId; // 该帧观测到的特征以及特征id
};
/*
* 产生世界坐标系下的虚拟数据: 相机姿态, 特征点, 以及每帧观测
*/
void GetSimDataInWordFrame(vector<Frame> &cameraPoses, vector<Eigen::Vector3d> &points) {
int featureNums = 20; // 特征数目,假设每帧都能观测到所有的特征
int poseNums = 3; // 相机数目
double radius = 8;
for (int n = 0; n < poseNums; ++n) {
double theta = n * 2 * M_PI / (poseNums * 4); // 1/4 圆弧
// 绕 z轴 旋转
Eigen::Matrix3d R;
R = Eigen::AngleAxisd(theta, Eigen::Vector3d::UnitZ());
Eigen::Vector3d t = Eigen::Vector3d(radius * cos(theta) - radius, radius * sin(theta), 1 * sin(2 * theta));
cameraPoses.push_back(Frame(R, t));
}
// 随机数生成三维特征点
std::default_random_engine generator;
std::normal_distribution<double> noise_pdf(0., 1. / 1000.); // 2pixel / focal
for (int j = 0; j < featureNums; ++j) {
std::uniform_real_distribution<double> xy_rand(-4, 4.0);
std::uniform_real_distribution<double> z_rand(4., 8.);
Eigen::Vector3d Pw(xy_rand(generator), xy_rand(generator), z_rand(generator));
points.push_back(Pw);
// 在每一帧上的观测量
for (int i = 0; i < poseNums; ++i) {
Eigen::Vector3d Pc = cameraPoses[i].Rwc.transpose() * (Pw - cameraPoses[i].twc);
Pc = Pc / Pc.z(); // 归一化图像平面
Pc[0] += noise_pdf(generator);
Pc[1] += noise_pdf(generator);
cameraPoses[i].featurePerId.insert(make_pair(j, Pc));
}
}
}
首先定义了fram结构体和生成数据的函数GetSimDataInWordFrame,这部分比较简单,噪声用正态分布去模拟的。主函数:
int main() {
// 准备数据
vector<Frame> cameras;
vector<Eigen::Vector3d> points;
GetSimDataInWordFrame(cameras, points);
Eigen::Quaterniond qic(1, 0, 0, 0);
Eigen::Vector3d tic(0, 0, 0);
// 构建 problem
Problem problem(Problem::ProblemType::SLAM_PROBLEM);
// 所有 Pose
vector<shared_ptr<VertexPose> > vertexCams_vec;
for (size_t i = 0; i < cameras.size(); ++i) {
shared_ptr<VertexPose> vertexCam(new VertexPose());
Eigen::VectorXd pose(7);
pose << cameras[i].twc, cameras[i].qwc.x(), cameras[i].qwc.y(), cameras[i].qwc.z(), cameras[i].qwc.w();
vertexCam->SetParameters(pose);
// if(i < 2)
// vertexCam->SetFixed();
problem.AddVertex(vertexCam);
vertexCams_vec.push_back(vertexCam);
}
// 所有 Point 及 edge
std::default_random_engine generator;
std::normal_distribution<double> noise_pdf(0, 1.);
double noise = 0;
vector<double> noise_invd;
vector<shared_ptr<VertexInverseDepth> > allPoints;
for (size_t i = 0; i < points.size(); ++i) {
//假设所有特征点的起始帧为第0帧, 逆深度容易得到
Eigen::Vector3d Pw = points[i];
Eigen::Vector3d Pc = cameras[0].Rwc.transpose() * (Pw - cameras[0].twc);
noise = noise_pdf(generator);
double inverse_depth = 1. / (Pc.z() + noise);
// double inverse_depth = 1. / Pc.z();
noise_invd.push_back(inverse_depth);
// 初始化特征 vertex
shared_ptr<VertexInverseDepth> verterxPoint(new VertexInverseDepth());
VecX inv_d(1);
inv_d << inverse_depth;
verterxPoint->SetParameters(inv_d);
problem.AddVertex(verterxPoint);
allPoints.push_back(verterxPoint);
// 每个特征对应的投影误差, 第 0 帧为起始帧
for (size_t j = 1; j < cameras.size(); ++j) {
Eigen::Vector3d pt_i = cameras[0].featurePerId.find(i)->second;
Eigen::Vector3d pt_j = cameras[j].featurePerId.find(i)->second;
shared_ptr<EdgeReprojection> edge(new EdgeReprojection(pt_i, pt_j));
edge->SetTranslationImuFromCamera(qic, tic);
std::vector<std::shared_ptr<Vertex> > edge_vertex;
edge_vertex.push_back(verterxPoint);
edge_vertex.push_back(vertexCams_vec[0]);
edge_vertex.push_back(vertexCams_vec[j]);
edge->SetVertex(edge_vertex);
problem.AddEdge(edge);
}
}
problem.Solve(5);
std::cout << "\nCompare MonoBA results after opt..." << std::endl;
for (size_t k = 0; k < allPoints.size(); k+=1) {
std::cout << "after opt, point " << k << " : gt " << 1. / points[k].z() << " ,noise "
<< noise_invd[k] << " ,opt " << allPoints[k]->Parameters() << std::endl;
}
std::cout<<"------------ pose translation ----------------"<<std::endl;
for (int i = 0; i < vertexCams_vec.size(); ++i) {
std::cout<<"translation after opt: "<< i <<" :"<< vertexCams_vec[i]->Parameters().head(3).transpose() << " || gt: "<<cameras[i].twc.transpose()<<std::endl;
}
/// 优化完成后,第一帧相机的 pose 平移(x,y,z)不再是原点 0,0,0. 说明向零空间发生了漂移。
/// 解决办法: fix 第一帧和第二帧,固定 7 自由度。 或者加上非常大的先验值。
problem.TestMarginalize();
return 0;
}
可以看到这里的顶点有vertexpose和vertexcam两种,
后端的部分:
之前说到的顶点、边、求解器这里都有对应的文件,所有顶点对应的父类为vertex,它有一个VecX来表示它的值,然后还要指定其维度。以姿态的顶点VertexPose为例:
class VertexPose : public Vertex {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
VertexPose() : Vertex(7, 6) {}
/// 加法,可重定义
/// 默认是向量加
virtual void Plus(const VecX &delta) override;
std::string TypeInfo() const {
return "VertexPose";
}
};
构造函数的两项参数为其变量的维数和实际自由度,比如姿态有6个自由度但是由于使用了四元数表示所以一共7维,这里就是7和6。同时对加法进行了override:
void VertexPose::Plus(const VecX &delta) {
VecX ¶meters = Parameters();
parameters.head<3>() += delta.head<3>();
Qd q(parameters[6], parameters[3], parameters[4], parameters[5]);
q = q * Sophus::SO3d::exp(Vec3(delta[3], delta[4], delta[5])).unit_quaternion(); // right multiplication with so3
q.normalized();
parameters[3] = q.x();
parameters[4] = q.y();
parameters[5] = q.z();
parameters[6] = q.w();
}
平移部分直接相加,旋转部分需要先将四元数的虚部转换为SO3下的更新量,再右乘原来的四元数,得到更新后的四元数,之后对四元数进行了归一化。
对于边来说,边负责计算残差,残差是(预测-观测),维度在构造函数中定义代价函数是 (残差×信息×残差),是一个数值,由后端求和后最小化。edge类的构造函数如下:
/**
* 构造函数,会自动化配雅可比的空间
* @param residual_dimension 残差维度
* @param num_verticies 顶点数量
* @param verticies_types 顶点类型名称,可以不给,不给的话check中不会检查
*/
explicit Edge(int residual_dimension, int num_verticies,
const std::vector<std::string> &verticies_types = std::vector<std::string>());
以在BA里使用的重投影误差的边EdgeReprojection为例说明:
/**
* 此边是视觉重投影误差,此边为三元边,与之相连的顶点有:
* 路标点的逆深度InveseDepth、第一次观测到该路标点的source Camera的位姿T_World_From_Body1,
* 和观测到该路标点的mearsurement Camera位姿T_World_From_Body2。
* 注意:verticies_顶点顺序必须为InveseDepth、T_World_From_Body1、T_World_From_Body2。
*/
class EdgeReprojection : public Edge {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
EdgeReprojection(const Vec3 &pts_i, const Vec3 &pts_j)
: Edge(2, 3, std::vector<std::string>{"VertexInverseDepth", "VertexPose", "VertexPose"}) {
pts_i_ = pts_i;
pts_j_ = pts_j;
}
/// 返回边的类型信息
virtual std::string TypeInfo() const override { return "EdgeReprojection"; }
/// 计算残差
virtual void ComputeResidual() override;
/// 计算雅可比
virtual void ComputeJacobians() override;
void SetTranslationImuFromCamera(Eigen::Quaterniond &qic_, Vec3 &tic_);
private:
//Translation imu from camera
Qd qic;
Vec3 tic;
//measurements
Vec3 pts_i_, pts_j_;
};
这里传入的pts_i和pts_j,分别是当前观测和上一帧观测的重投影的像素坐标,并且在归一化平面上,即z=1。前面说到edge要负责计算出顶点残差和其对应的雅克比,这部分的函数如下,在cpp文件中:
/* std::vector> verticies_; // 该边对应的顶点
VecX residual_; // 残差
std::vector jacobians_; // 雅可比,每个雅可比维度是 residual x vertex[i]
MatXX information_; // 信息矩阵
VecX observation_; // 观测信息
*/
void EdgeReprojection::ComputeResidual() {
double inv_dep_i = verticies_[0]->Parameters()[0];
VecX param_i = verticies_[1]->Parameters();
Qd Qi(param_i[6], param_i[3], param_i[4], param_i[5]);
Vec3 Pi = param_i.head<3>();
VecX param_j = verticies_[2]->Parameters();
Qd Qj(param_j[6], param_j[3], param_j[4], param_j[5]);
Vec3 Pj = param_j.head<3>();
Vec3 pts_camera_i = pts_i_ / inv_dep_i;
Vec3 pts_imu_i = qic * pts_camera_i + tic;
Vec3 pts_w = Qi * pts_imu_i + Pi;
Vec3 pts_imu_j = Qj.inverse() * (pts_w - Pj);
Vec3 pts_camera_j = qic.inverse() * (pts_imu_j - tic);
double dep_j = pts_camera_j.z();
residual_ = (pts_camera_j / dep_j).head<2>() - pts_j_.head<2>(); /// J^t * J * delta_x = - J^t * r
}
首先计算残差,这里的残差是按照第三讲中的视觉重投影误差计算的,首先取得i帧下的逆深度,然后获得两帧相机的姿态,之后通过坐标系的转换将i帧下的像素点坐标pts_i_转换到j帧的坐标系下,最后将转换过来的像素坐标(pts_camera_j / dep_j)和j帧下的测量值取差得到残差。
void EdgeReprojection::ComputeJacobians() {
double inv_dep_i = verticies_[0]->Parameters()[0];
VecX param_i = verticies_[1]->Parameters();
Qd Qi(param_i[6], param_i[3], param_i[4], param_i[5]);
Vec3 Pi = param_i.head<3>();
VecX param_j = verticies_[2]->Parameters();
Qd Qj(param_j[6], param_j[3], param_j[4], param_j[5]);
Vec3 Pj = param_j.head<3>();
Vec3 pts_camera_i = pts_i_ / inv_dep_i;
Vec3 pts_imu_i = qic * pts_camera_i + tic;
Vec3 pts_w = Qi * pts_imu_i + Pi;
Vec3 pts_imu_j = Qj.inverse() * (pts_w - Pj);
Vec3 pts_camera_j = qic.inverse() * (pts_imu_j - tic);
double dep_j = pts_camera_j.z();
Mat33 Ri = Qi.toRotationMatrix();
Mat33 Rj = Qj.toRotationMatrix();
Mat33 ric = qic.toRotationMatrix();
Mat23 reduce(2, 3);
reduce << 1. / dep_j, 0, -pts_camera_j(0) / (dep_j * dep_j),
0, 1. / dep_j, -pts_camera_j(1) / (dep_j * dep_j);
// reduce = information_ * reduce;
Eigen::Matrix<double, 2, 6> jacobian_pose_i;
Eigen::Matrix<double, 3, 6> jaco_i;
jaco_i.leftCols<3>() = ric.transpose() * Rj.transpose();
jaco_i.rightCols<3>() = ric.transpose() * Rj.transpose() * Ri * -Sophus::SO3d::hat(pts_imu_i);
jacobian_pose_i.leftCols<6>() = reduce * jaco_i;
Eigen::Matrix<double, 2, 6> jacobian_pose_j;
Eigen::Matrix<double, 3, 6> jaco_j;
jaco_j.leftCols<3>() = ric.transpose() * -Rj.transpose();
jaco_j.rightCols<3>() = ric.transpose() * Sophus::SO3d::hat(pts_imu_j);
jacobian_pose_j.leftCols<6>() = reduce * jaco_j;
Eigen::Vector2d jacobian_feature;
jacobian_feature = reduce * ric.transpose() * Rj.transpose() * Ri * ric * pts_i_ * -1.0 / (inv_dep_i * inv_dep_i);
jacobians_[0] = jacobian_feature;
jacobians_[1] = jacobian_pose_i;
jacobians_[2] = jacobian_pose_j;
}
雅克比的计算同样和第三讲中一样,前面计算逆深度、各个变换矩阵的过程和计算残差的相同,reduce矩阵对应链式计算中的 ∂ r c ∂ f c j \frac{\partial r_c}{\partial f_{c_j}} ∂fcj∂rc,之后分别计算了 f c j f_{c_j} fcj对各个状态量的导数,以对i时刻pose的导数为例:先计算出对位移的导数
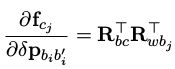
对应jaco_j.leftCols<3>() = ric.transpose() * Rj.transpose();之后是对角度的偏导,hat表示对fbi即程序中的pts_imu_j求反对称矩阵,最后再乘上reduce就得到了残差rc对i时刻pose的偏导。
其他两个状态量j时刻的pose和逆深度的求导,同样根据第三讲推导的公式来就可以了。最后得到整个视觉重投影误差的雅克比矩阵。
到这里edge的结构差不多就清楚了,接下来进入problem类:该类函数较多,我们从主函数用到的顺序来看,Problem problem(Problem::ProblemType::SLAM_PROBLEM);首先构造problem对象,有SLAM和普通两种类型,这里我们用SLAM类,之后向problem中加入了顶点和边:
bool Problem::AddVertex(std::shared_ptr<Vertex> vertex) {
if (verticies_.find(vertex->Id()) != verticies_.end()) {
LOG(WARNING) << "Vertex " << vertex->Id() << " has been added before";
return false;
} else {
verticies_.insert(pair<unsigned long, shared_ptr<Vertex>>(vertex->Id(), vertex));
}
if (problemType_ == ProblemType::SLAM_PROBLEM) {
if (IsPoseVertex(vertex)) {
ResizePoseHessiansWhenAddingPose(vertex);
}
}
return true;
}
以添加顶点为例,函数会给顶点添加一个序号,同时根据顶点是否为pose来生成H矩阵,例如第一个pose在左上角00位置,第二个应该左上角就为66。添加完顶点和边后,主函数直接调用solve方法就结束了,我们来看一下solve函数:
bool Problem::Solve(int iterations) {
if (edges_.size() == 0 || verticies_.size() == 0) {
std::cerr << "\nCannot solve problem without edges or verticies" << std::endl;
return false;
}
TicToc t_solve;
// 统计优化变量的维数,为构建 H 矩阵做准备
SetOrdering();
// 遍历edge, 构建 H 矩阵
MakeHessian();
// LM 初始化
ComputeLambdaInitLM();
// LM 算法迭代求解
bool stop = false;
int iter = 0;
while (!stop && (iter < iterations)) {
std::cout << "iter: " << iter << " , chi= " << currentChi_ << " , Lambda= " << currentLambda_ << std::endl;
bool oneStepSuccess = false;
int false_cnt = 0;
while (!oneStepSuccess) // 不断尝试 Lambda, 直到成功迭代一步
{
// setLambda
// AddLambdatoHessianLM();
// 第四步,解线性方程
SolveLinearSystem();
//
// RemoveLambdaHessianLM();
// 优化退出条件1: delta_x_ 很小则退出
if (delta_x_.squaredNorm() <= 1e-6 || false_cnt > 10) {
stop = true;
break;
}
// 更新状态量
UpdateStates();
// 判断当前步是否可行以及 LM 的 lambda 怎么更新
oneStepSuccess = IsGoodStepInLM();
// 后续处理,
if (oneStepSuccess) {
// 在新线性化点 构建 hessian
MakeHessian();
// TODO:: 这个判断条件可以丢掉,条件 b_max <= 1e-12 很难达到,这里的阈值条件不应该用绝对值,而是相对值
// double b_max = 0.0;
// for (int i = 0; i < b_.size(); ++i) {
// b_max = max(fabs(b_(i)), b_max);
// }
// // 优化退出条件2: 如果残差 b_max 已经很小了,那就退出
// stop = (b_max <= 1e-12);
false_cnt = 0;
} else {
false_cnt ++;
RollbackStates(); // 误差没下降,回滚
}
}
iter++;
// 优化退出条件3: currentChi_ 跟第一次的chi2相比,下降了 1e6 倍则退出
if (sqrt(currentChi_) <= stopThresholdLM_)
stop = true;
}
std::cout << "problem solve cost: " << t_solve.toc() << " ms" << std::endl;
std::cout << " makeHessian cost: " << t_hessian_cost_ << " ms" << std::endl;
return true;
}
这里用到的是第四讲求解最小二乘的内容,首先通过SetOrdering()函数统计待优化状态量的维度,之后通过MakeHessian()构建H矩阵,也就是我们第四讲说的信息矩阵 Λ \Lambda Λ。这里需要我们补充一些代码:
for (size_t i = 0; i < verticies.size(); ++i) {
auto v_i = verticies[i];
if (v_i->IsFixed()) continue; // Hessian 里不需要添加它的信息,也就是它的雅克比为 0
auto jacobian_i = jacobians[i];
ulong index_i = v_i->OrderingId();
ulong dim_i = v_i->LocalDimension();
MatXX JtW = jacobian_i.transpose() * edge.second->Information();
for (size_t j = i; j < verticies.size(); ++j) {
auto v_j = verticies[j];
if (v_j->IsFixed()) continue;
auto jacobian_j = jacobians[j];
ulong index_j = v_j->OrderingId();
ulong dim_j = v_j->LocalDimension();
assert(v_j->OrderingId() != -1);
MatXX hessian = JtW * jacobian_j;
// 所有的信息矩阵叠加起来
H.block(index_i,index_j, dim_i, dim_j).noalias() += hessian;
if (j != i) {
// 对称的下三角
H.block(index_j,index_i, dim_j, dim_i).noalias() += hessian.transpose();
}
}
b.segment(index_i, dim_i).noalias() -= JtW * edge.second->Residual();
}
这是在遍历所有的edge的代码内部构建H矩阵的过程,对于每一条边都要进行这样两个for循环,分别是遍历方阵H的行和列,第一个i的for循环是行数,当遍历到行列相等,也就是对角的时候,只用放入一次hessian,而其他情况下都要放入关于对角对称的两个hessian,这是由于这两个位置的hessian是转置的关系。而b则在行遍历的时候一行行填入就可以了。
这一讲由于涉及很多程序讲解,为避免篇幅过长,分开为两个博客。