【VIO笔记(学习VINS的必备基础)】第五讲(2/2) 手写VIO后端
文章目录
- 单目BA程序
- VINS中的滑动窗口算法
- 滑动窗口中的问题
系列教程来自某学院,侵权删除。
学习完这一系列课程再去看VINS才能做到不吃力,不然直接撸网上的各种VINS解析完全云里雾里-_-!
上接第五讲1/2。
单目BA程序
上一讲讲到了H矩阵的构建,之后就要进行LM算法的初始化,ComputeLambdaInitLM()函数用于计算阻尼因子的初始值,在第三讲中说到过,阻尼因子的初始值选取方式为:

其中 τ \tau τ是一个系数,按工程经验取值,程序里这个值取了10^-5double tau = 1e-5;,最后阻尼因子的计算为currentLambda_ = tau * maxDiagonal;maxdiagonal是H矩阵对角线上最大的块。
初始化完成之后就进入LM迭代求解的部分,迭代次数由solve函数的入口参数确定,这是最后的运行结果截图,可以看到迭代了5次,
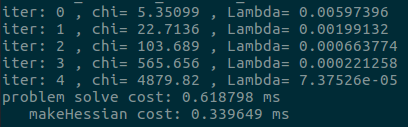
下面我们来看一次迭代中,LM算法是怎么实现的,方便阅读再把程序放上来一次:
while (!stop && (iter < iterations)) {
std::cout << "iter: " << iter << " , chi= " << currentChi_ << " , Lambda= " << currentLambda_ << std::endl;
bool oneStepSuccess = false;
int false_cnt = 0;
while (!oneStepSuccess) // 不断尝试 Lambda, 直到成功迭代一步
{
// 解Hx=b
SolveLinearSystem();
// 优化退出条件1: delta_x_ 很小则退出
if (delta_x_.squaredNorm() <= 1e-6 || false_cnt > 10) {
stop = true;
break;
}
// 更新状态量
UpdateStates();
// 判断当前步是否可行以及 LM 的 lambda 怎么更新
oneStepSuccess = IsGoodStepInLM();
// 后续处理,
if (oneStepSuccess) {
// 在新线性化点 构建 hessian
MakeHessian();
false_cnt = 0;
} else {
false_cnt ++;
RollbackStates(); // 误差没下降,回滚
}
}
iter++;
// 优化退出条件2: currentChi_ 跟第一次的chi2相比,下降了 1e6 倍则退出
if (sqrt(currentChi_) <= stopThresholdLM_)
stop = true;
}
首先使用SolveLinearSystem();来求解 Δ x \Delta x Δx,如果求解后 Δ x \Delta x Δx的值够小则认为迭代成功,令stop = true;退出while循环,否则更新状态量并判断当前步是否可行,可行的话就在当前的状态量下求新的H和b,否则当发现误差没有下降的时候就进行回滚。同时如果当残差下降得够多也可以退出迭代。
求解完problem整个问题BA就结束了,最后主函数里还有一个边缘化的测试函数,对应的是第四讲里的例子,假设有
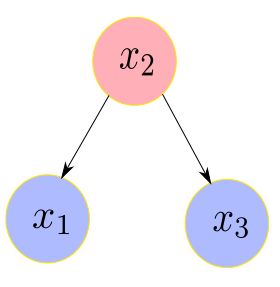

对应的信息矩阵为
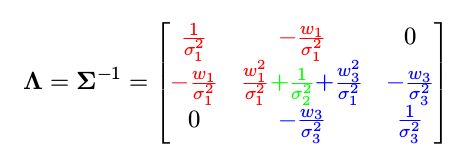
现在要从这个例子中marg掉x2,那么要求之后的信息矩阵。程序如下:
void Problem::TestMarginalize() {
// Add marg test
int idx = 1; // marg 中间那个变量
int dim = 1; // marg 变量的维度
int reserve_size = 3; // 总共变量的维度
double delta1 = 0.1 * 0.1;
double delta2 = 0.2 * 0.2;
double delta3 = 0.3 * 0.3;
int cols = 3;
MatXX H_marg(MatXX::Zero(cols, cols));
H_marg << 1./delta1, -1./delta1, 0,
-1./delta1, 1./delta1 + 1./delta2 + 1./delta3, -1./delta3,
0., -1./delta3, 1/delta3;
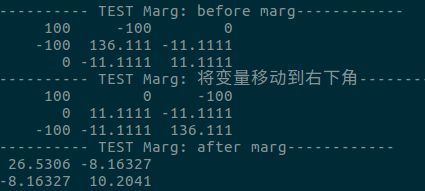
std::cout << "---------- TEST Marg: before marg------------"<< std::endl;
std::cout << H_marg << std::endl;
// TODO:: home work. 将变量移动到右下角
/// 准备工作: move the marg pose to the Hmm bottown right
// 将 row i 移动矩阵最下面
Eigen::MatrixXd temp_rows = H_marg.block(idx, 0, dim, reserve_size);
Eigen::MatrixXd temp_botRows = H_marg.block(idx + dim, 0, reserve_size - idx - dim, reserve_size);
H_marg.block(idx, 0, dim, reserve_size) = temp_botRows;
H_marg.block(idx + dim, 0, reserve_size - idx - dim, reserve_size) = temp_rows;
// 将 col i 移动矩阵最右边
Eigen::MatrixXd temp_cols = H_marg.block(0, idx, reserve_size, dim);
Eigen::MatrixXd temp_rightCols = H_marg.block(0, idx + dim, reserve_size, reserve_size - idx - dim);
H_marg.block(0, idx, reserve_size, reserve_size - idx - dim) = temp_rightCols;
H_marg.block(0, reserve_size - dim, reserve_size, dim) = temp_cols;
std::cout << "---------- TEST Marg: 将变量移动到右下角------------"<< std::endl;
std::cout<< H_marg <<std::endl;
/// 开始 marg : schur
double eps = 1e-8;
int m2 = dim;
int n2 = reserve_size - dim; // 剩余变量的维度
Eigen::MatrixXd Amm = 0.5 * (H_marg.block(n2, n2, m2, m2) + H_marg.block(n2, n2, m2, m2).transpose());
Eigen::SelfAdjointEigenSolver<Eigen::MatrixXd> saes(Amm);
Eigen::MatrixXd Amm_inv = saes.eigenvectors() * Eigen::VectorXd(
(saes.eigenvalues().array() > eps).select(saes.eigenvalues().array().inverse(), 0)).asDiagonal() *
saes.eigenvectors().transpose();
// TODO:: home work. 完成舒尔补操作
Eigen::MatrixXd Arm = H_marg.block(0,n2,n2,m2);
Eigen::MatrixXd Amr = H_marg.block(n2,0,m2,n2);
Eigen::MatrixXd Arr = H_marg.block(0,0,n2,n2);
Eigen::MatrixXd tempB = Arm * Amm_inv;
Eigen::MatrixXd H_prior = Arr - tempB * Amr;
std::cout << "---------- TEST Marg: after marg------------"<< std::endl;
std::cout << H_prior << std::endl;
}
操作的流程是先将待marg的状态量移动到信息矩阵的右下角,之后将矩阵化为四个矩阵块,根据之前的流程:
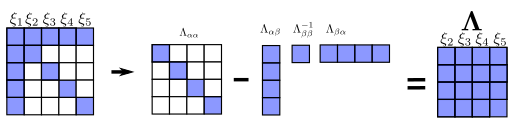
即可得到新的信息矩阵,最后我的运行结果如下:
VINS中的滑动窗口算法
滑动窗口中的问题
1、先验残差
之前第四讲中已经说到先验残差由于已经被marg掉了所以固定不变,那么能不能更新先验残差呢?其实是可以的,虽然先验信息矩阵固定不变,但随着迭代的推进,变量被不断优化,先验残差需要跟随变化。否则,求解系统可能奔溃。
方法:先验残差的变化可以使用一阶泰勒近似。
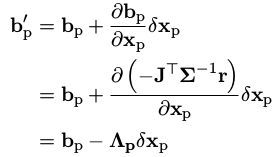
这样就????
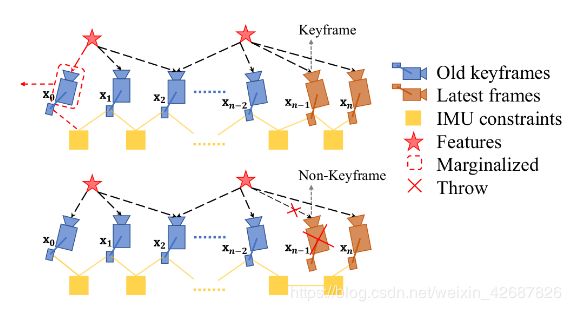
2、marg选取问题
在vins中需要对滑动窗口中下一个marg掉的帧进行选择:
• 当滑动窗口中第二新的图像帧为关键帧,则 marg 最老的帧,以及上面的路标点。
• 当滑动窗口中第二新的图像帧不是关键帧,则丢弃这一帧上的视觉测量信息,IMU 预积分传给下一帧。