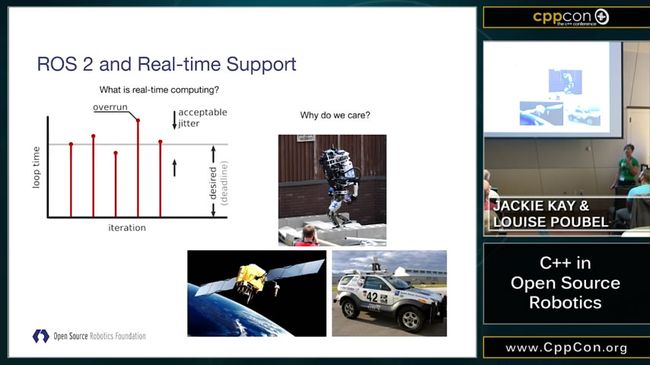
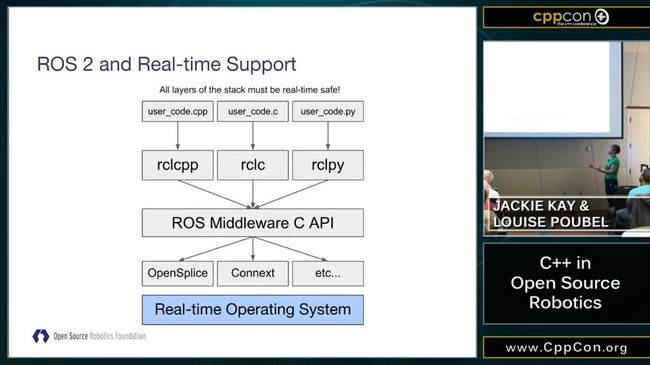
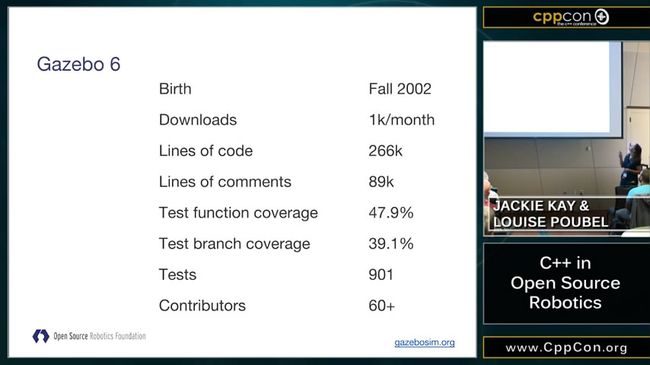
ROS讲座 关于ROS2和Gazebo C++ in Open Source Robotics
分享一个不错的介绍ROS2和Gazebo的视频讲座。
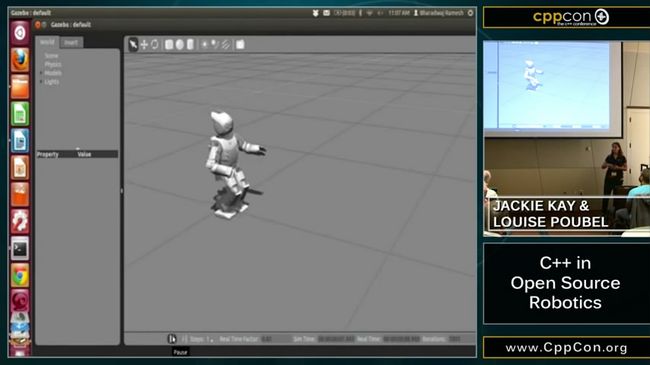
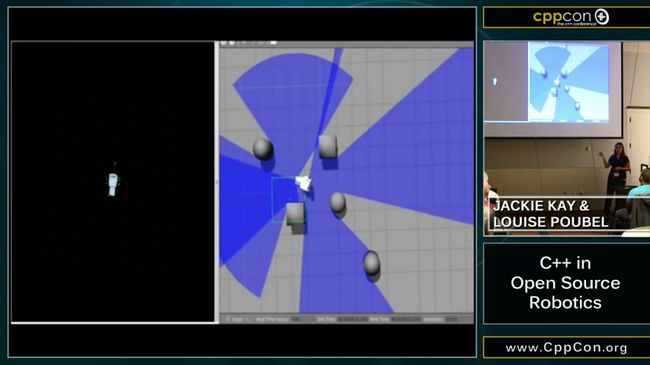
Gazebo中的云彩飘动起来了!!!!
超清视频分享网址: http://v.youku.com/v_show/id_XMTcyMzY0NzUwOA
源码和重要资料网址:https://github.com/CppCon/CppCon2015
内容非常详尽。
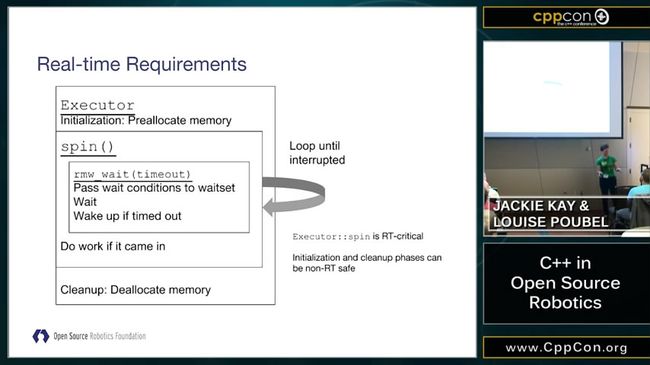
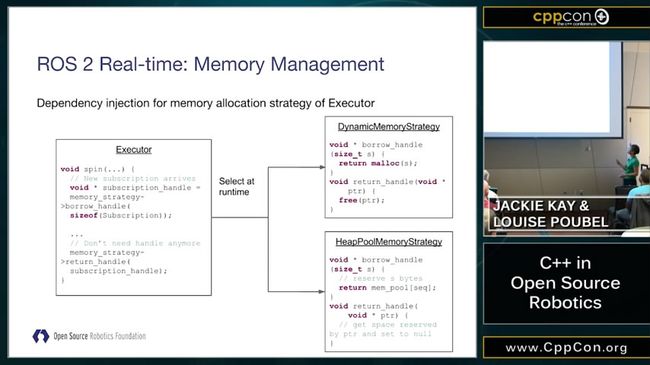
讲座内容:











----














----
CppCon 2015 Presentation Materials
https://github.com/CppCon/CppCon2015 is the canonical location for presentations and code from CppCon 2015.
For Speakers: Submitting Materials
Index of Materials
Keynotes
- Better Code - Data Structures by Sean Parent [.key] [.pdf]
- Ranges for the Standard Library by Eric Niebler
- Writing Good C++14 by Bjarne Stroustrup
- Writing Good C++14 By Default by Herb Sutter
Presentations
- 3D Face Tracking and Reconstruction using Modern C++ by Patrik Huber
- A C++14 Approach to Dates and Times by Howard Hinnant
- A Crash Course in Open Source Licensing by Kevin P. Fleming
- A Few Good Types by Neil MacIntosh
- All Your Tests Are Terrible by Titus Winters and Hyrum Wright
- allocator Is to Allocation what vector Is to Vexation by Andrei Alexandrescu
- Applying functional programming in code design by Michał Dominiak
- Benchmarking C++ Code by Bryce Adelstein Lelbach
- Beyond Sanitizers by Kostya Serebryany
- Boostache Exposed by Michael Caisse
- Bridging Languages Cross-Platform by Andrew Twyman and Jacob Potter
- C++ Coroutines by Gor Nishanov
- C++ for cross-platform VR development by Nicolas Lazareff
- C++ in Open Source Robotics by Jackie Kay, Louise Poubel
- C++ In the Audio Industry by Timur Doumler
- C++ Metaprogramming by Fedor Pikus
- C++ metaprogramming- a paradigm shift by Louis Dionne
- C++ Multi-dimensional Arrays for Computational Physics and Applied Mathematics by Pramod Gupta
- C++ on the Web by JF Bastien
- C++11, 14, 17 Atomics - the Deep Dive by Michael Wong
- CLANG C2 for Windows by Jim Radigan
- Comparison is not simple, but it can be simpler - Lawrence Crowl - CppCon 2015 by Lawrence Crowl [.odp] [.ppt] [more materials]
- Compile-time tools for generic programming in C++ by Abel Sinkovics
- Concurrency TS - Editor’s Report by Artur Laksberg
- constexpr Applications by Scott Schurr
- constexpr Introduction by Scott Schurr
- Contracts for Dependable C++ by Gabriel Dos Reis
- Cross-Platform Mobile App Dev with VC++ by Ankit Asthana and Marc Gregoire
- Declarative Control Flow by Andrei Alexandrescu
- Demystifying Floating Point by John Farrier
- Easy compilation from TouchDevelop to ARM Cortex-M0 using C++11 by Jonathan Protzenko
- Enhancing STL Containers by Viktor Korsun
- Evolving Legacy Code by Rachel Cheng and Michael VanLoon
- Executors for C++ - A Long Story by Detlef Vollmann
- for_each_argument explained and expanded by Vittorio Romeo [more materials]
- From Functional To Parallel - Stochastic Modelling in C++ by Kevin Carpenter
- functional - What's New, And Proper Usage by Stephan T. Lavavej [.pdf] [.pptx]
- Functional Design Explained by David Sankel
- Functional programming - functors and monads by Michał Dominiak
- Haskell Design Pattern by Sherri Shulman
- How I learned to stop worrying and love metaprogramming by Edouard Alligand
- How to make your data structures wait-free for reads by Pedro Ramalhete
- Intro to C++ Object Model by Richard Powell [.key] [.pdf] [more materials]
- Large Scale C++ With Modules by Gabriel Dos Reis
- Lessons in Sustainability by Titus Winters
- Live lock-free or deadlock by Fedor Pikus
- Memory and C++ debugging at EA by Scott Wardle
- Networking and Number Crunching with C++ by Matt P. Dziubinski
- Null Pointers Shouldn't Compile by Jacob Potter
- Organizational Leadership With Modern C++ by Kevin Kostrzewa and John Wyman
- Panel Discussion on C++ Technical Specifications by Marshall Clow, Gor Nishanov, Gabriel Dos Reis, Michael Wong, Michael Caisse, Beman Dawes and Eric Niebler
- Parallelizing the C++ STL by Grant Mercer and Daniel Bourgeois
- Programming with less effort in C++ by Sylvain Jubertie
- Pruning Error Messages From Your C++ Template Code by Roland Bock
- Qt - modern user interfaces for C++ by Milian Wolff
- Rcpp - Seamless R and C++ Integration by Matt P. Dziubinski
- Reactive Stream Processing Rx4DDS by Sumant Tambe
- Reflection techniques in C++ by Paul Fultz II
- Simple Extensible Pattern Matching With C++14 by John Bandela
- Static Analysis and C++ by Neil Macintosh
- STL Algorithms in Action by Michael VanLoon [.pdf] [.pptx]
- Stop Teaching C by Kate Gregory
- string_view by Marshall Clow
- Testing Battle.net by Ben Deane
- The Birth of Study Group 14 by Nicolas Guillemot, Sean Middleditch, Michael Wong
- The Importance of Being Const by Richard Powell [.key] [.pdf]
- The Sad Story of memory_order_consume by Paul E. McKenney
- Time Programming Fundamentals by Greg Miller
- Transactional Memory in Practice by Brett Hall
- Transducers, from Clojure to C++ by Juan Pedro Bolivar Puente [more materials]
- Type Traits by Marshall Clow
- Unexceptional exceptions by Fedor Pikus
- Value Semantics by John Lakos
- Variable Templates - C++14 compile-time computation by Peter Sommerlad
- Variadic Templates - Guidelines, Examples and Compile-time computation by Peter Sommerlad
- What is Open Source, and Why Should You Care by Kevin P. Fleming
- What's New In VS2015 by Steve Carroll
- Work Stealing by Pablo Halpern
- Writing Great Libraries in 89 Easy Steps by Zach Laine
- Writing my own CMS by Jens Weller
Tutorials
- An Overview on Encryption in C++ by Jens Weller
- Boost Units for Correct Code by Robert Ramey
- cppreference.com - the community wiki by Sergey Zubkov
- Crazy Easy Scripting with ChaiScript by Jason Turner
- Effective C++ Implementation of Class Properties by Viktor Korsun
- Expression Templates What Why When Were by Joel Falcou [more materials]
- Futures from Scratch by Arthur O'Dwyer
- Implementation of a component-based entity system in modern C++ by Vittorio Romeo [more materials]
- Integrating generators EDSL's for Boost.Spirit X3 by Felipe Magno de Almeida
- Kiss Templates by Roland Bock
- Lambdas from First Principles by Arthur O'Dwyer
- Racing the Filesystem by Niall Douglas
- Secure C++ Programming by Gwendolyn Hunt
- The Current State of (Free) Static Analysis by Jason Turner
- Using Spirit x3 To Write Parsers by Michael Caisse
Demos
- Becoming a GDB Power User by Greg Law
- On C++, Javascript and WebSockets by Alex Fabijanic
- Visualizing Template Instantiations - Templator Demo by Peter Sommerlad
Lightning Talks and Lunch Sessions
- A different way to use boost serialization by Jens Weller
- Algorithmic Differentiation - C++ and Extremum Estimation by Matt P. Dziubinski
- Being Smart About Pointers by Michael VanLoon
- C++ devirtualization in clang by Piotr Padlewski
- C++ in the telecom industry by Yani Miguel
- C++ Requests - Curl for People by Huu Nguyen
- C++ WAT by Piotr Padlewski
- completion - Improving the future with monads by Travis Gockel
- Emacs as a C++ IDE by Atila Neves
- Extreme Type Safety with Opaque Typedefs by Kyle Markley
- Give Me 15 Minutes and I'll Change Your View of GDB by Greg Law
- Heaptrack - A Heap Memory Profiler by Milian Wolff
- How to infix your code by Pascal Bormann
- Integrating TinyMCE3 into Qt by Jens Weller
- Introducing Brigand by Edouard Alligand and Joel Falcou
- Practical Move Semantics by Titus Winters
- RapidCheck, property based testing for C++ by Emil Eriksson
- The dangers of C style casts by Joshua Gerrard [.odp] [.pdf]
- Traits Go Mainstream by Leor Zolman
- Unbounded Lock-Free Concurrent Queue by Jaedyn Draper
特别推荐:ROS第三方教程----http://edu.gaitech.hk/




----
其他补充:
rosparam:http://www.ros.org/news/2016/08/new-package-rosparam-handler-package.html
https://github.com/cbandera/rosparam_handler
gaitech: http://www.ros.org/news/2016/09/gaitech-educational-portal-for-ros.html
http://edu.gaitech.hk/
http://www.gaitech.hk/
http://forum.gaitech.hk/
http://www.gaitech.net/
http://ros.gaitech.net/forum.php
