ceres学习笔记(一)
参考教程:http://www.ceres-solver.org/nnls_tutorial.html
Non-linear Least Squares(非线性最小二乘法)
Introduction
Ceres可以解决边界约束非线性最小二乘问题
这种形式的问题出现在科学和工程的广泛领域 - 从统计学中的曲线拟合到从计算机视觉中的三维重建。
在本章中,我们将学习如何使用Ceres Solver解决(1)。 可以在示例目录中找到本章中描述的所有示例的完整工程代码。
表达式 p i ( ∣ ∣ f i ( x i 1 , . . . , x i k ) ∣ ∣ 2 ) p_i(||f_i(x_{i1},...,x_{ik})||^2) pi(∣∣fi(xi1,...,xik)∣∣2)被认为残差块(ResidualBlock, f i ( . ) f_i(.) fi(.)叫做代价函数(CostFunction)。代价函数依赖于一系列参数 [ x i 1 , . . . , x i k ] [x_{i1},...,x_{ik}] [xi1,...,xik],在大多数优化问题中,小组标量一起出现。例如,平移向量的三个分量和四元数的四个分量定义摄像机的位姿。这一系列参数(均为标量)称为参数块(parameterBlock),当然参数块中可以只是一个参数, l j l_j lj和 u j u_j uj作为参数块 x j x_j xj的边界。
p i p_i pi是损失函数(lossFunction),损失函数作为一个标量函数被用来减小异常值(Outliers)对非线性最小二乘问题的解的影响。
一个特殊情况是,当 p i ( x ) = x p_i(x)=x pi(x)=x,并且范围为 l j = − ∞ l_j=-\infty lj=−∞和 u j = ∞ u_j=\infty uj=∞,我们可以得到最熟悉的非线性最小二乘问题。
1 2 ∑ ∣ ∣ f i ( x i 1 , . . . , x i k ) ∣ ∣ 2 \frac{1}{2}\sum{||f_i(x_{i1},...,x_{ik})||^2} 21∑∣∣fi(xi1,...,xik)∣∣2
Hello World!
一开始,先考虑一个找到最小值函数的问题 1 2 ( 10 − x ) 2 \frac{1}{2}(10-x)^2 21(10−x)2,这是一个很简单的问题,最小值位于x=10附近,但是这是一个很好用来解释基础的问题用ceres求解。
第一步编写一个函数,函数为 f ( x ) = 10 − x f(x)=10-x f(x)=10−x
struct CostFunctor {
template
bool operator()(const T* const x, T* residual) const {
residual[0] = T(10.0) - x[0];
return true;
}
};
这里需要注意最重要的一点是operator()是一个模板,假设所有的输入和输出都是某种类型T,.这里使用模板允许Ceres调用CostFunctor :: operator (), 当需要残差值时,T = double,当需要雅可比矩阵时,使用特殊类型T = Jet。这一部分在后续教程还有更详细的介绍。
一旦我们有了计算残差函数的方法,现在是时候用它来构造一个非线性最小二乘问题并让Ceres解决它。
int main(int argc, char** argv)
{
google::InitGoogleLogging(argv[0]);
// The variable to solve for with its initial value.
// 用初始值求解的变量
double initial_x = 5.0;
double x = initial_x;
// Build the problem.
// 建立问题
Problem problem;
// Set up the only cost function (also known as residual). This uses
// auto-differentiation to obtain the derivative (jacobian).
//设置唯一的成本函数(也称为残差)。
//这用自动微分以获得导数(雅可比)。
CostFunction* cost_function =
new AutoDiffCostFunction(new CostFunctor);
problem.AddResidualBlock(cost_function, NULL, &x);
// 进行求解
Solver::Options options;
options.linear_solver_type = ceres::DENSE_QR;
options.minimizer_progress_to_stdout = true;
Solver::Summary summary;
Solve(options, &problem, &summary);
std::cout << summary.BriefReport() << "\n";
std::cout << "x : " << initial_x
<< " -> " << x << "\n";
return 0;
}
AutoDiffCostFunction将CostFunctor作为输入,自动区分它并为其提供CostFunction接口。
运行程序
// Ceres Solver - A fast non-linear least squares minimizer
// Copyright 2015 Google Inc. All rights reserved.
// http://ceres-solver.org/
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions are met:
//
// * Redistributions of source code must retain the above copyright notice,
// this list of conditions and the following disclaimer.
// * Redistributions in binary form must reproduce the above copyright notice,
// this list of conditions and the following disclaimer in the documentation
// and/or other materials provided with the distribution.
// * Neither the name of Google Inc. nor the names of its contributors may be
// used to endorse or promote products derived from this software without
// specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
// AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
// IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
// ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
// LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
// CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
// SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
// INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
// CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
// ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
// POSSIBILITY OF SUCH DAMAGE.
//
// Author: [email protected] (Keir Mierle)
//
// A simple example of using the Ceres minimizer.
//
// Minimize 0.5 (10 - x)^2 using jacobian matrix computed using
// automatic differentiation.
#include "ceres/ceres.h"
#include "glog/logging.h"
using ceres::AutoDiffCostFunction;
using ceres::CostFunction;
using ceres::Problem;
using ceres::Solver;
using ceres::Solve;
// A templated cost functor that implements the residual r = 10 -
// x. The method operator() is templated so that we can then use an
// automatic differentiation wrapper around it to generate its
// derivatives.
struct CostFunctor {
template bool operator()(const T* const x, T* residual) const {
residual[0] = 10.0 - x[0];
return true;
}
};
int main(int argc, char** argv) {
google::InitGoogleLogging(argv[0]);
// The variable to solve for with its initial value. It will be
// mutated in place by the solver.
double x = 0.5;
const double initial_x = x;
// Build the problem.
Problem problem;
// Set up the only cost function (also known as residual). This uses
// auto-differentiation to obtain the derivative (jacobian).
CostFunction* cost_function =
new AutoDiffCostFunction(new CostFunctor);
problem.AddResidualBlock(cost_function, NULL, &x);
// Run the solver!
Solver::Options options;
options.minimizer_progress_to_stdout = true;
Solver::Summary summary;
Solve(options, &problem, &summary);
std::cout << summary.BriefReport() << "\n";
std::cout << "x : " << initial_x
<< " -> " << x << "\n";
return 0;
}
运行程序的环境 ubuntu16.04+clion
CmakeLists.txt
cmake_minimum_required(VERSION 3.5)
project(ceress)
set(CMAKE_CXX_STANDARD 11)
# 添加cmake模块以使用ceres库
list( APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules )
find_package(Ceres REQUIRED)
include_directories( ${CERES_INCLUDE_DIRS} )
add_executable(ceress main.cpp)
target_link_libraries(ceress ${CERES_LIBRARIES} )
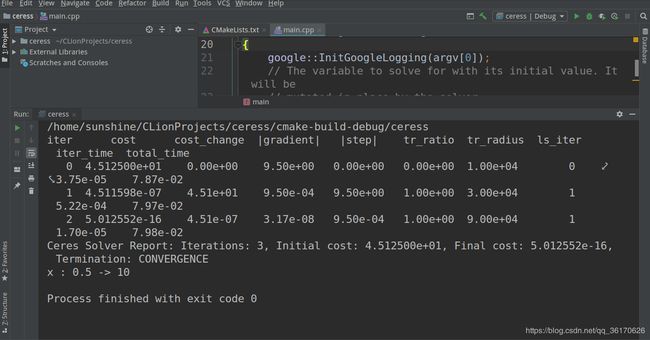
从x = 5开始,两次迭代中的求解器变为10 [2]。 细心的读者会注意到这是一个线性问题,一个线性求解应该足以得到最优值。 求解器的默认配置针对非线性问题,为简单起见,我们在此示例中未对其进行更改。 确实可以在一次迭代中使用Ceres获得该问题的解决方案。 还要注意,求解器在第一次迭代中确实非常接近0的最佳函数值。 当我们讨论Ceres的收敛和参数设置时,我们将更详细地讨论这些问题。