从零手写VIO(二)
在这里对从零手写VIO的第二次作业进行总结:IMU代码仿真,使用使用Allen方差工具标定IMU imu_utils或kalibr_allan
这是我总结的一份从零写VIO第二讲的思维导图从零写VIO(二)
文章目录
- 1仿真代码解析
- 1.1编译vio_data_simulation-master
- 1.2仿真思路
- 1.3运动模型
- 1.4添加噪声
- 1.5运动模型的离散积分
- 1.5.1欧拉积分
- 1.5.2中值积分
- 2ROS版的IMU仿真代码
- 2.1 下载编译
- 2.2 生成imu.bag
- 3使用Allan方差工具标定
- 3.1 使用imu_utils标定
- 3.1.1 安装imu_utils
- 3.1.2 标定
- 3.1.3 结果分析
- 3.2 使用kalibr_allan标定
- 3.2.1 安装kalibr_allan
- 3.2.2 bag文件转换成mat
- 3.2.3 生成曲线参数文件并标定
- 3.2.4结果分析
- 4 扩展阅读
- 5 总结
作业题目:
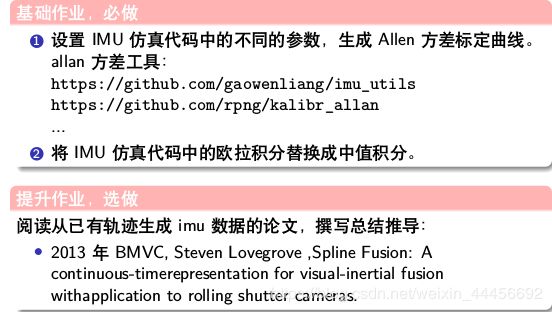
1仿真代码解析
仿真代码地址:https://github.com/HeYijia/vio_data_simulation
该github仓库中除了提供了普通版本的仿真代码外,还提供了ROS版本的仿真代码,用于生成img.bag,以供后面使用Allan方差工具进行标定。
1.1编译vio_data_simulation-master
首先是编译这个普通版本的仿真代码,就是按编译的常规套路来:
git clone https://github.com/HeYijia/vio_data_simulation
cd vio_data_simulation
mkdir build
cd build
camke ..
make
cd ../bin
./data_gen
这样就生成我们所需的:
imu_pose_noise.txt ,imu_pose.txt ,imu_int_pose_noise.txt, imu_int_pose.txt
等数据。
使用python-tool下的Python脚本,可以绘制处点,IMU轨迹等
cd ../python_tool
python draw_trajctory.py
1.2仿真思路
指定轨迹方程,求一阶导得到速度, 角速度,求二阶导得到加速度。对加速度角速度添加高斯白噪声和bias 的随机游走噪声,得到仿真数据。
1.3运动模型
在该仿真代码中,在imu.cpp中定义了IMU的运动模型:
MotionData IMU::MotionModel(double t)
{
MotionData data;
// param
float ellipse_x = 15;
float ellipse_y = 20;
float z = 1; // z轴做sin运动
float K1 = 10; // z轴的正弦频率是x,y的k1倍
float K = M_PI/ 10; // 20 * K = 2pi 由于我们采取的是时间是20s, 系数K控制yaw正好旋转一圈,运动一周
// translation world系下 因为IMU的position就是body系在world系下的坐标
// twb: body frame in world frame
Eigen::Vector3d position( ellipse_x * cos( K * t) + 5, ellipse_y * sin( K * t) + 5, z * sin( K1 * K * t ) + 5);
Eigen::Vector3d dp(- K * ellipse_x * sin(K*t), K * ellipse_y * cos(K*t), z*K1*K * cos(K1 * K * t)); // position导数 in world frame
double K2 = K*K;
Eigen::Vector3d ddp( -K2 * ellipse_x * cos(K*t), -K2 * ellipse_y * sin(K*t), -z*K1*K1*K2 * sin(K1 * K * t)); // position二阶导数
// Rotation
double k_roll = 0.1;
double k_pitch = 0.2;
// body系下的角度
Eigen::Vector3d eulerAngles(k_roll * cos(t) , k_pitch * sin(t) , K*t ); // roll ~ [-0.2, 0.2], pitch ~ [-0.3, 0.3], yaw ~ [0,2pi]
// 对欧拉角进行求导,得到world系下的欧拉角速度
Eigen::Vector3d eulerAnglesRates(-k_roll * sin(t) , k_pitch * cos(t) , K); // euler angles 的导数
// Eigen::Vector3d eulerAngles(0.0,0.0, K*t ); // roll ~ 0, pitch ~ 0, yaw ~ [0,2pi]
// Eigen::Vector3d eulerAnglesRates(0.,0. , K); // euler angles 的导数
Eigen::Matrix3d Rwb = euler2Rotation(eulerAngles); // body frame to world frame
Eigen::Vector3d imu_gyro = eulerRates2bodyRates(eulerAngles) * eulerAnglesRates; // euler rates trans to body gyro
Eigen::Vector3d gn (0,0,-9.81); // gravity in navigation frame(ENU) ENU (0,0,-9.81) NED(0,0,9,81)
Eigen::Vector3d imu_acc = Rwb.transpose() * ( ddp - gn ); // Rbw * Rwn * gn = gs
data.imu_gyro = imu_gyro; // body系下的角速度
data.imu_acc = imu_acc; // body系下的加速度
data.Rwb = Rwb; //IMU的位姿数据使用Twb进行存储
data.twb = position;
data.imu_velocity = dp; // IMU的速度 world系
data.timestamp = t; // 时间戳
return data;
}
可以看到,指定的IMU轨迹方程Position比较简单,大致能想出它的样子,大概是一个“王冠”的样子它在xy面投影为圆心(-5,-5)的圆。同时IMU也在以自身坐标系下做旋转运动,以欧拉角表示其旋转,该旋转也是一个随时间变化的函数。
对Position进行一阶导和二阶导,分别得到IMU在世界坐标系下的速度和加速度。对Rotation进行一阶导,得到IMU在body系下的角速度。利用这些值,我们最终得到了IMU的MotionData:
data.imu_gyro = imu_gyro; // body系下的角速度
data.imu_acc = imu_acc; // body系下的加速度
data.Rwb = Rwb; //IMU的位姿数据使用Twb进行存储
data.twb = position;
data.imu_velocity = dp; // IMU的速度 world系
data.timestamp = t; // 时间戳
1.4添加噪声
设定,加速度的高斯白噪声设定为 0.019, 陀螺仪的高斯白噪声为 0.015. 加速度 bias 的随机游走噪声设定为 5e−4 ,陀螺仪的 bias 随机游走噪声设定为 5e−5 。
void IMU::addIMUnoise(MotionData& data)
{
std::random_device rd;
std::default_random_engine generator_(rd());
std::normal_distribution<double> noise(0.0, 1.0);
// gyro
Eigen::Vector3d noise_gyro(noise(generator_),noise(generator_),noise(generator_));// 生成一个高斯白噪声
Eigen::Matrix3d gyro_sqrt_cov = param_.gyro_noise_sigma * Eigen::Matrix3d::Identity(); // 感觉这里可有可无
// w = w + ng + bg, 其中ng = σd*n, n~N(0,1),σd = σ/sqrt(Δt) ,bg会在下面单独更新
data.imu_gyro = data.imu_gyro + gyro_sqrt_cov * noise_gyro / sqrt( param_.imu_timestep ) + gyro_bias_;
// acc
Eigen::Vector3d noise_acc(noise(generator_),noise(generator_),noise(generator_));
Eigen::Matrix3d acc_sqrt_cov = param_.acc_noise_sigma * Eigen::Matrix3d::Identity();//
// a = a + na + ba, 其中na = σd*n, n~N(0,1),σd = σ/sqrt(Δt) ,ba会在下面单独更新
data.imu_acc = data.imu_acc + acc_sqrt_cov * noise_acc / sqrt( param_.imu_timestep ) + acc_bias_;
// gyro_bias update
Eigen::Vector3d noise_gyro_bias(noise(generator_),noise(generator_),noise(generator_));
// bg = σd*n, n~N(0,1), σd = σ*sqrt(Δt)
gyro_bias_ += param_.gyro_bias_sigma * sqrt(param_.imu_timestep ) * noise_gyro_bias;
data.imu_gyro_bias = gyro_bias_;
// acc_bias update
Eigen::Vector3d noise_acc_bias(noise(generator_),noise(generator_),noise(generator_));
// ba = σd*n, n~N(0,1), σd = σ*sqrt(Δt)
acc_bias_ += param_.acc_bias_sigma * sqrt(param_.imu_timestep ) * noise_acc_bias;
data.imu_acc_bias = acc_bias_;
}
在这里我们只考虑了高斯白噪声和 bias 随机游走,需要注意两者的计算:
w = w + ng + bg, 其中ng = σdn, n~N(0,1),σd = σ/sqrt(Δt) , bg = σdn, n~N(0,1), σd = σsqrt(Δt)
a = a + na + ba, 其中na = σdn, n~N(0,1),σd = σ/sqrt(Δt), ba = σdn, n~N(0,1), σd = σsqrt(Δt)
因为IMU获取的数据都是离散数据,注意高斯白噪声方差从连续时间到离散时间需要乘以一个1/sqrt(Δt),随机游走的噪声方差从连续时间到离散之间需要乘以一个sqrt(Δt),Δt为传感器的采样时间。
至此我们获得了IMU的仿真数据,主要是IMU在body系下的位姿数据:
imu_pose_noise.txt
imu_pose.txt
1.5运动模型的离散积分
在实际应用中,因为IMU的频率远远大于相机频率,所以我们往往需要对IMU离散数据进行积分,使IMU数据与相机数据对齐。
这次就利用上面得到的IMU的离散仿真数据,使用欧拉积分和中值积分,比较两种积分的的效果。(通过比较积分后的轨迹imu_int_pose.txt是否和积分前的轨迹imu_pose.txt重合)
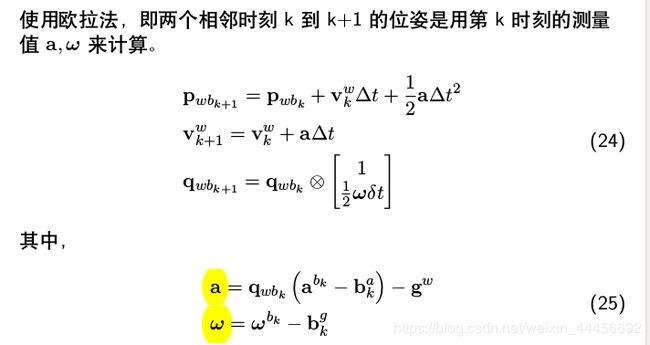
1.5.1欧拉积分
代码:
for (int i = 1; i < imudata.size(); ++i) {
MotionData imupose = imudata[i];
//delta_q = [1 , 1/2 * thetax , 1/2 * theta_y, 1/2 * theta_z]
Eigen::Quaterniond dq;
Eigen::Vector3d dtheta_half = imupose.imu_gyro * dt / 2.0;
dq.w() = 1;
dq.x() = dtheta_half.x();
dq.y() = dtheta_half.y();
dq.z() = dtheta_half.z();
/// imu 动力学模型 欧拉积分
Eigen::Vector3d acc_w = Qwb * (imupose.imu_acc) + gw; // aw = Rwb * ( acc_body - acc_bias ) + gw
Qwb = Qwb * dq;
Pwb = Pwb + Vw * dt + 0.5 * dt * dt * acc_w;
Vw = Vw + acc_w * dt;
// 按着imu postion, imu quaternion , cam postion, cam quaternion 的格式存储,由于没有cam,所以imu存了两次
save_points << imupose.timestamp << " "
<< Qwb.w() << " "
<< Qwb.x() << " "
<< Qwb.y() << " "
<< Qwb.z() << " "
<< Pwb(0) << " "
<< Pwb(1) << " "
<< Pwb(2) << " "
<< Qwb.w() << " "
<< Qwb.x() << " "
<< Qwb.y() << " "
<< Qwb.z() << " "
<< Pwb(0) << " "
<< Pwb(1) << " "
<< Pwb(2) << " "
<< std::endl;
}
效果:

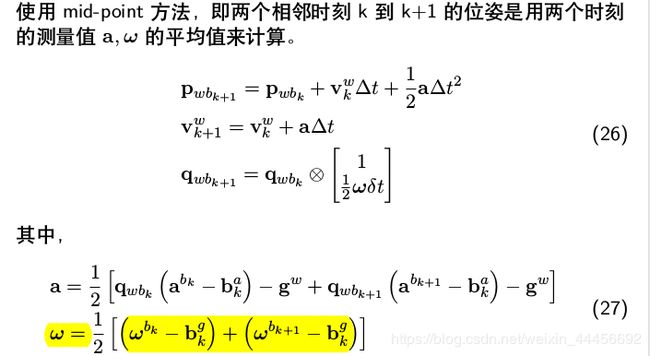
1.5.2中值积分
代码:
for (int i = 1; i < imudata.size(); ++i)
{
MotionData imupose_pre = imudata[i-1];
MotionData imupose_now = imudata[i];
MotionData imupose_mean = imudata[i];
imupose_mean.imu_gyro = (imupose_pre.imu_gyro + imupose_now.imu_gyro) / 2.0;
Eigen::Quaterniond dq;
Eigen::Vector3d dtheta_half = (imupose_mean.imu_gyro) * dt / 2.0;
dq.w() = 1;
dq.x() = dtheta_half.x();
dq.y() = dtheta_half.y();
dq.z() = dtheta_half.z();
// imu 动力学模型 参考svo预积分论文
Eigen::Vector3d acc_w = Qwb * (imupose_pre.imu_acc) + gw; // aw = Rwb * ( acc_body - acc_bias ) + gw
Qwb = Qwb * dq; //获得Qwb_k+1
//Qwb+1
Eigen::Vector3d acc_w1 = Qwb * (imupose_now.imu_acc) + gw; // aw = Rwb * ( acc_body - acc_bias ) + gw
acc_w = (acc_w + acc_w1) / 2.0;
//a update
Vw = Vw + acc_w * dt;
//Pwb update
Pwb = Pwb + Vw * dt + 0.5 * dt * dt * acc_w;
// 按着imu postion, imu quaternion , cam postion, cam quaternion 的格式存储,由于没有cam,所以imu存了两次
save_points << imupose_mean.timestamp << " "
<< Qwb.w() << " "
<< Qwb.x() << " "
<< Qwb.y() << " "
<< Qwb.z() << " "
<< Pwb(0) << " "
<< Pwb(1) << " "
<< Pwb(2) << " "
<< Qwb.w() << " "
<< Qwb.x() << " "
<< Qwb.y() << " "
<< Qwb.z() << " "
<< Pwb(0) << " "
<< Pwb(1) << " "
<< Pwb(2) << " "
<< std::endl;
}
效果:
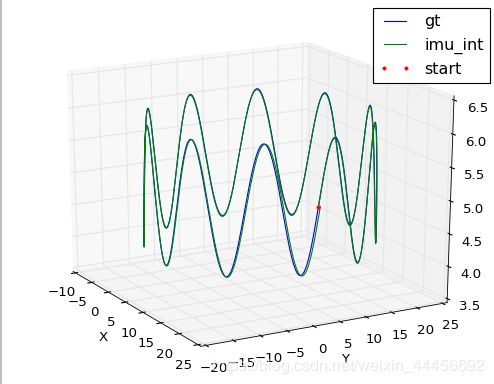
很明显,中值积分的效果要好于欧拉积分,当然,这是显而易见的,根据原理我们就能看出:

2ROS版的IMU仿真代码
2.1 下载编译
下载编译:
mkdir -p vio_sim_ws/src
cd src
git clone https://github.com/HeYijia/vio_data_simulation
git checkout ros_version
catkin_make
2.2 生成imu.bag
首先,打开catkin_ws_vio_data_simulation/src/vio_data_simulation-ros_version/src/gener_alldata.cpp,设置imu.bag的存储路径。
bag.open("/your-path/imu.bag", rosbag::bagmode::Write);
然后,启动节点,生成imu.bag。
source devel/setup.bash
rosrun vio_data_simulation vio_data_simulation_node
至此,我们得到了一个IMU仿真数据的ROS bag包。接下来利用Allan方差工具对其进行标定。
3使用Allan方差工具标定
主要是使用imu_utils和kalibr_allan进行标定。
3.1 使用imu_utils标定
3.1.1 安装imu_utils
首先,安装依赖:
sudo apt-get install libdw-dev
先编译code_utils,然后再编译imu_utils
mkdir -p imu-calibration/src
cd imu-calibration/src
git clone https://github.com/gaowenliang/code_utils.git
cd ..
catkin_make
cd imu-calibration/src
git clone https://github.com/gaowenliang/imu_utils.git
cd ..
catkin_make
中间出现的问题:
错误1:找不到Eigen
我们一般通过以下命令安装Eigen:
sudo apt-get install libeigen3-dev
这样Eigen就默认安装在/usr/include/eigen3,需要在/home/jlg/imu-calibration/src/code_utils/CMakeLists.txt中注释掉find_package(Eigen3 REQUIRED),然后添加:
include_directories(/usr/include/eigen3)
错误2:找不到backward.hpp
atal error: backward.hpp: No such file or directory
把文件code_utils/src/sumpixel_test.cpp中的#include "backward.hpp"改成#include "code_utils/backward.hpp"即可。
错误3:std::ofstream未定义
/home/***/imu-calibration/src/imu_utils/src/imu_an.cpp:69:19: error:
aggregate ‘std::ofstream out_t’ has incomplete type and cannot be
defined
打开文件imu_utils/src/imu_an.cpp,添加:
#include 这里参考了:https://blog.csdn.net/learning_tortosie/article/details/102415313
事实上,可能是运气好,我没有碰到这些问题,但是还是记录一下,以防万一。
3.1.2 标定
- 采集IMU数据
这里的IMU数据就使用我们上面生成的imu.bag。当然作者也提供了几个包,可以先测试一下。
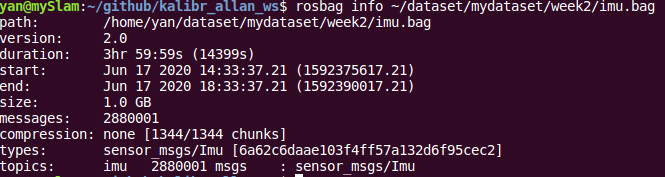
可以看到,我们之前生成的img.bag,topic为imu, 大概四个小时的时长。 - 写launch文件
可以参考launch文件夹下作者写的几个launch文件,根据自己imu的topic和name进行修改:
>
>
>
>
>
>
>
>
>
比如我这里就修改了imu_topic所对应的value:/imu,imu_name所对应的value:mems,另外要记得把launch文件名改成imu_name,我这里就是mems.launch。
- 生成Allan方差数据
启动刚才的launch文件
cd imu-calibration
source ./devel/setup.bash
roslaunch imu_utils mems.launch
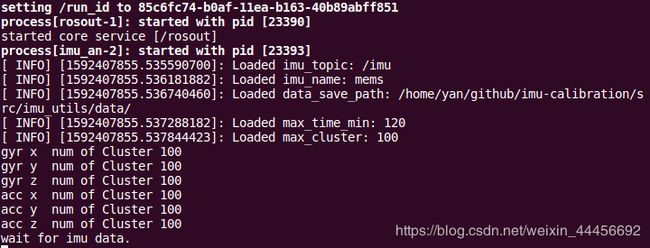
新打开一个terminal窗口,以200倍速播放imu.bag
rosbag play -r 200 imu.bag
要注意,这里 img.bag要带上你存放的路径:yourpath/imu.bag
过一段时间(15s左右?),就会在data文件夹下生成一些数据:
以及一个mems_imu_param.yaml:
%YAML:1.0
---
type: IMU
name: mems
Gyr:
unit: " rad/s"
avg-axis:
gyr_n: 2.1221203233760574e-01
gyr_w: 8.9467924142534435e-04
x-axis:
gyr_n: 2.1046384179740413e-01
gyr_w: 8.0473827758366584e-04
y-axis:
gyr_n: 2.1360563530391058e-01
gyr_w: 9.2214122848867288e-04
z-axis:
gyr_n: 2.1256661991150250e-01
gyr_w: 9.5715821820369432e-04
Acc:
unit: " m/s^2"
avg-axis:
acc_n: 2.6764053623067113e-01
acc_w: 3.6174135533268148e-03
x-axis:
acc_n: 2.6811296473220231e-01
acc_w: 3.6652237104732588e-03
y-axis:
acc_n: 2.6789918945541225e-01
acc_w: 3.7987720199202969e-03
z-axis:
acc_n: 2.6690945450439874e-01
acc_w: 3.3882449295868896e-03
感觉标定的不是很准啊,也不知道是怎么回事。
4. 绘制Allan方差图
修改 draw_allan.m中文件路径
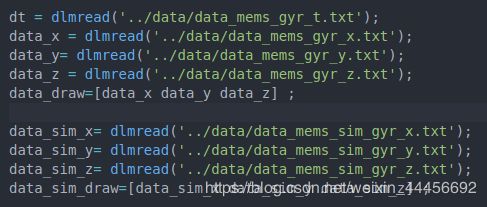
将这几个路径都改为刚刚生成的数据的路径,然后运行drawn_allan.m
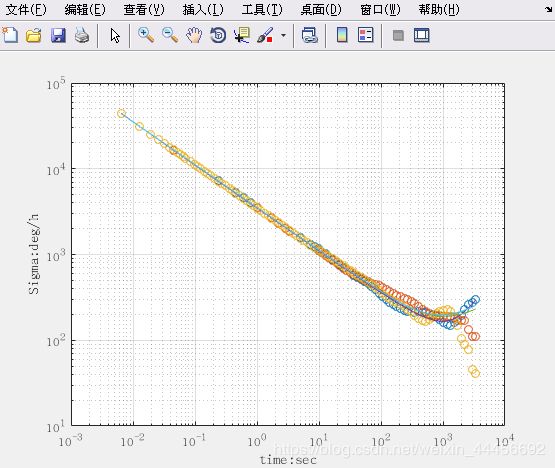
需要注意的是,纵坐标的单位是deg/h。
对该图的理解,可以参考:
https://www.cl.cam.ac.uk/techreports/UCAM-CL-TR-696.pdf
https://www.vectornav.com/support/library/gyroscope
部分解释:

对图进行分析即可得到加速度和角速度的高斯白噪声和游走Bias误差
t =1 的时候索对应的纵坐标值就是高斯白噪声
t=3的时候对应的纵坐标就是游走Bias误差。
有关Allan方差技术的完整描述,请参阅:
IEEE Std 962-1997 (R2003) Standard Specification Format Guide and Test Procedure for Single-Axis Interferometric Fiber Optic Gyros, Annex C.IEEE, 2003
或参考博客:https://blog.csdn.net/baidu_41931307/article/details/102971466
3.1.3 结果分析
在上面我们经过标定得到了一个mems_imu_param.yaml文件,其中就是标定结果,我们只看avg的结果
%YAML:1.0
---
type: IMU
name: mems
Gyr:
unit: " rad/s"
avg-axis:
gyr_n: 2.1221203233760574e-01
gyr_w: 8.9467924142534435e-04
Acc:
unit: " m/s^2"
avg-axis:
acc_n: 2.6764053623067113e-01
acc_w: 3.6174135533268148e-03
在之前生成IMU仿真数据的时候,我们有如下设定:
设定加速度的高斯白噪声设定为 0.019, 陀螺仪的高斯白噪声为 0.015. 加速度 bias 的随机游走噪声设定为 5e−4 ,陀螺仪的 bias 随机游走噪声设定为 5e−5 。
// time
int imu_frequency = 200;
int cam_frequency = 30;
double imu_timestep = 1./imu_frequency;
double cam_timestep = 1./cam_frequency;
∆t=1/200=0.005s
这里对标定结果连续化采用的公式是
高斯白噪声:
σ = σ d ⋅ △ t σ=σ_d \cdot {\sqrt{\triangle t}} σ=σd⋅△t
bias随机游走:
σ b = σ b d 1 △ t σ_b = σ_{bd}\frac{1}{ \sqrt{\triangle t}} σb=σbd△t1
来看看标定结果和我们设置的是否相同
列表格看起来更清晰一点:
陀螺仪:
| 陀螺仪高斯白噪声大小 | 实际大小 | 标定结果 | 标定结果连续化后结果 |
|---|---|---|---|
| PPT默认噪声 | 0.015 | 2.1221203233760574e-01 | 0.015005656711529994 |
![]()
| 陀螺仪Bias随机游走大小 | 实际大小 | 标定结果 | 标定结果连续化后结果 |
|---|---|---|---|
| PPT默认噪声 | 5e−5 | 8.9467924142534435e-04 | 0.012652675171973946 |
![]()
加速度计:
| 加速度计高斯白噪声大小 | 实际大小 | 标定结果 | 标定结果连续化后结果 |
|---|---|---|---|
| PPT默认噪声 | 0.019 | 2.6764053623067113e-01 | 0.018925043808911142 |
![]()
| 加速度计Bias随机游走大小 | 实际大小 | 标定结果 | 标定结果连续化后结果 |
|---|---|---|---|
| PPT默认噪声 | 5e-4 | 3.6174135533268148e-03 | 0.051157953078270306 |
![]()
从以上结果可以看出,加速度计和陀螺仪的高斯白噪声估计是较为准确的,但是Bias随机游走的大小却差了几个数量级。
改变噪声大小后,可以比较一下标定结果,具体可参考博客:https://blog.csdn.net/weixin_44580210/article/details/92846020
3.2 使用kalibr_allan标定
3.2.1 安装kalibr_allan
mkdir -p ~/catkin_ws/src
git clone https://github.com/rpng/kalibr_allan.git
cd ..
catkin_make
具体安装路径和工程名自己看着改
3.2.2 bag文件转换成mat
参考其官网github上的介绍 ,使用bagconvert将.bag转换成.mat文件:
rosrun bagconvert bagconvert your_data_path/imu.bag imu
your_data_path就是imu.bag的路径,以转换后的文件为img.mat,和imu.bag同路径下。

3.2.3 生成曲线参数文件并标定
修改~/catkin_ws/src/kalibr_allan/matlab文件夹下的SCRIPT_allan_matparallel.m中.mat路径,运行生成参数文件
这个挺耗时间的,视机器性能吧,我的小破笔记本跑了半个多小时
然后就生成了参数文件:
![]()
再改一下SCRIPT_process_results.m中load文件的路径
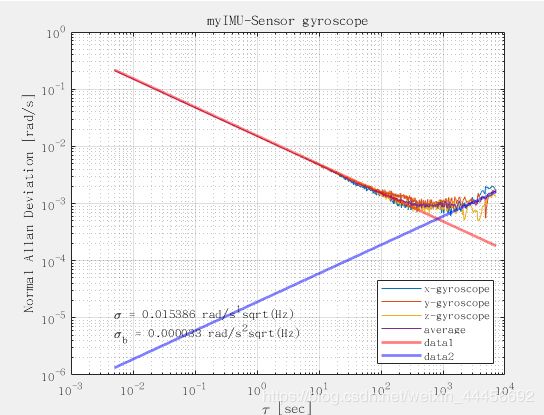
运行SCRIPT_process_results.m,即可对上面生成的参数文件进行处理并展示保存结果:
陀螺仪:
加速度计:
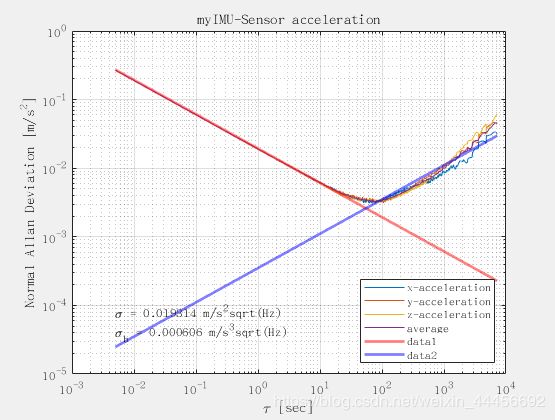
3.2.4结果分析
kalibr_allan直接在图中给出了标定结果:
accelerometer_noise_density = 0.01931403 /设定值0.019
accelerometer_random_walk = 0.00060598 /设定值5e-4
gyroscope_noise_density =0.01538619 / 设定值0.015
gyroscope_random_walk = 0.00003262 / 设定值5-e5
简单对比一下,可以发现kalibr_allan的标定结果要比imu_utils的标定结果要精确不少,而且直接给出了高斯白噪声和bias的随机游走噪声的值,更加方便,所以更推荐使用kalibr_allan进行标定。
4 扩展阅读
参考深蓝学院《从零开始手写VIO》作业二
5 总结
其实也没啥要说的了,也知道作为一个小白,也写不出什么有深度的技术文(心有b数),目前也就是记录一下学习的过程。虽然这篇文章有很多大佬已经总结过了,而且总结的远比我写的好,但是感觉还是要自己动手写一遍,就当是整理思路了吧。
这个作业整整搞了三天,忙于装库,编译,调试,踩坑,PPT翻了一遍又一遍。中间还安装了MATLAB2018,然后导致我的破小笔记本根目录爆满,又到处找扩容根目录的方法,所幸最后还是扩容成功了。虽然过程坎坷,不止一次有想砸电脑的冲动,但是最终还是有所收获。
所有的迷茫都来于知识的匮乏。而探索未知的东西又是前进的动力。愿不断前行,拨开迷雾,寻找那一道光。
终有豁然开朗的那一天的。
参考文章:
《视觉SLAM进阶:从零开始手写VIO》第二讲作业
深蓝学院《从零开始手写VIO》作业二
手写VIO-使用Allen方差工具标定IMU