【空心杯四旋翼TinyLeaf】四旋翼基础
目录
四旋翼构型
简单力学分析
什么是欧拉角
几个自由度
螺旋桨
空心杯电机
脉冲宽度调制(PWM)技术
控制初探
Visio,CAD和Solidworks画图是在太累了,接下来我会主要使用手绘来配图,大家理解一下哈~
-
四旋翼构型
四旋翼飞行器有很多种构型,在本文中只介绍最常见的X构型四旋翼,这种构型的四旋翼飞行器俯视图具体结构如下图所示:
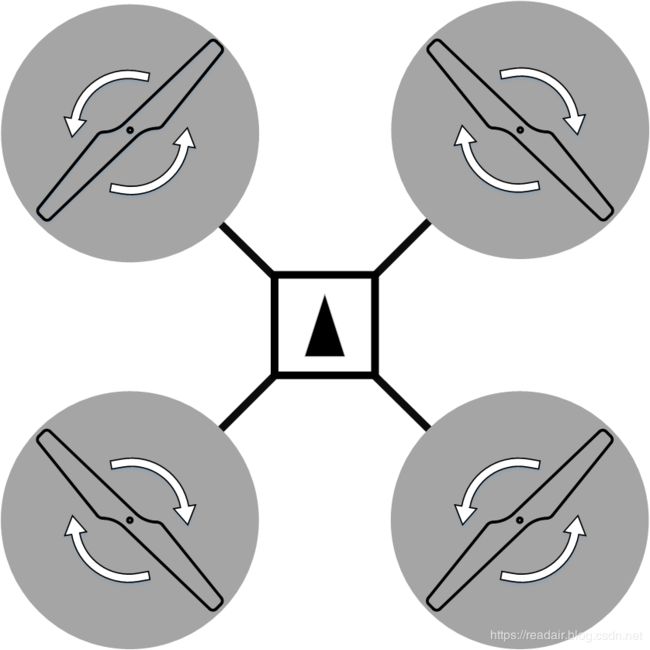 X构型四旋翼俯视图
X构型四旋翼俯视图
黑色三角所指的方向即为飞行器的"头",四个旋翼的旋向已在图中标出。
-
简单力学分析
每个旋翼在旋转时会产生推力,推力在飞行器垂直方向上的合力大于飞行器整体重力时,飞机就飞起来啦

作用在同一刚体两个位置上的力,可以等效为一个合力和一个同源的力矩(机械原理课程中称力偶矩)

四旋翼的姿态控制,简单的来说,就是调节四个旋翼电机转速来调节升力,继而通过四个点的升力产生的力与力矩来实现这一系列的控制目标的。
什么是欧拉角
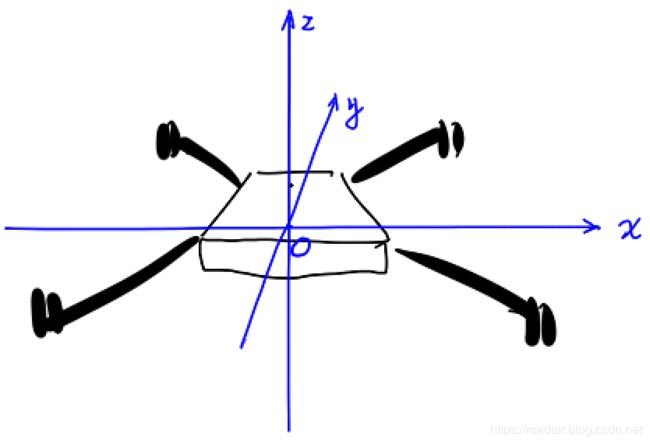
欧拉角指的是在空间直角坐标系o-xyz下的三轴转角pitch,roll,yaw,分别代表俯仰角,横滚角和航向角,注意这只是一种说法,在航模中比较普遍,在船模中会有其他的叫法。
如何简单记住呢?假设你的视线指向就是飞机的机头朝向,那么
点头==俯仰
摇头==航向
左右摆头==横滚

几个自由度
自由度(Degree of Freedom,DoF)是一个在机器人控制中常见的名词,它在很多场合下有不同的意义,在运动控制中,可以描述一个被控对象的可控维度。在三维空间中,刚体的姿态有6个自由度,他们分别是三轴自旋(就是欧拉角)和三轴直线运动(X,Y,Z轴)
那么,一架普通的四旋翼,我们直接控制的是几个自由度呢?6个吗?其实只有4个
这4个是Z轴直线运动(高度)和三轴转动(欧拉角),四轴明明可以在水平面移动,为什么X轴,Y轴是不能直接控制的呢?那是因为水平面的动力是通过飞机倾斜情况下 旋翼的升力和重力的合力来实现的

螺旋桨
大家可以看一下本文开头“四旋翼构型”一小节中的配图,螺旋桨是有正反桨的,正桨和反桨镜面对称。正桨是指顺时针旋转时产生向上升力的螺旋桨,反桨是指逆时针旋转时产生向上升力的螺旋桨(也有相反的说法),螺旋桨的升力来自于伯努利效应(流体的流速越大,压强越小;流体的流速越小,压强越大。)导致叶片上下侧压强差产生的压力。这个力是垂直于叶片表面的,所以我们可以发现,螺旋桨在产生轴向升力的时候,还会产生一个扭矩,这个扭矩可以加以利用用来控制四旋翼的航向,同时也使得我们必须采用正反桨的设计来抑制飞行器的自旋。

空心杯电机
空心杯电机种类很多,我们主要在航模上主要使用的是620/720/820/8520/1020型号的直流有刷电机,关于型号,720就是指电机直径7mm,轴向长度20mm的空心杯。具体形状如图:
这种类型的空心杯电机特点是转速快,扭矩大(相对同体积的其他常规电机,比如玩具四驱车的小马达),一般只有两根接线,电压越大,转速越快(实际这是不准确的,转速和扭矩和负载转矩相关,而扭矩和电流大小成正比,具体请参考电机学教材,我们只需知道,在其他条件不变的情况下,电压越高,转速越快)。
这种空心杯的轻载工作电流就在500mA以上,在正常工作情况下可以达到2A左右,如果不幸堵转,瞬时电流可能会超过5A。对于这种电机的供电,一般直接接在电池(动力电)上,用Mos管控制开关。一般的空心杯四旋翼没有需要旋翼正反转的需求,所以只需要一个Mos管控制电路通断即可。
脉冲宽度调制(PWM)技术
上一小节我们讲到电机的转速和加载在电机两线之间的电压正相关,电池的电压短期内是近似不变的,那我们如何来调节加载在电机两端之间的电压呢,这就需要用到PWM技术(Pulse Width Modulation)

如果我希望一个只能打开和关闭的小灯发出50%的光,就可以用PWM技术实现(如下图):

在数字电路中,“1”就是高电平,“0”就是低电平,高电平“1”占整个周期T的比率就叫做占空比,调节占空比,就可以调节电机两端电压,进而控制螺旋桨转速,进而控制电机组的升力。
控制初探
看完上面的介绍,我们就可以开始探讨四个电机转速与姿态的关系了。通过调节四个旋翼的转速,可以控制四旋翼的四个自由度:
- 垂直升力(这个力和四个旋翼的轴向一直,不是垂直于地面哦)
- 航向扭力矩
- 俯仰扭力矩
- 横滚扭力矩

首先,我们看最简单的升力从哪来:借用模拟电子电路课程中的概念,

升力和四个电机升力的共模量成正比,根据在简单力学分析一章中讲的,其实升力的大小就是四个旋翼升力的和,升力的作用点在飞行器的质心;
俯仰扭力矩和横滚扭力矩的控制非常类似,这两种力矩的来源是转轴两侧旋翼升力的差模量
航向扭力矩的产生比较特殊,还记得在螺旋桨一章中提到的“螺旋桨在产生轴向升力的时候,还会产生一个扭矩”,我们就是利用了这个扭矩实现的航向的控制,航向扭力矩和正桨共模量与反桨共模量的差模量成正比,有点拗口是不是,在下一篇博文中我会用线性代数的方式来解释这个扭力矩。
我用一个简单的图示来描述一下这四个自由度的控制:

笔者能力有限,错漏之处在所难免,如有错误,可在下方评论指出,也可邮箱交流:[email protected]。
码字不易,给个赞可好?