Ubuntu16.04上配置安装ceres
这篇博客主要介绍如何配置ceres库并通过使用ceres库拟合一条曲线来介绍ceres库的简单使用
参考了以下博客:
https://blog.csdn.net/weixin_39373577/article/details/81285420
一、安装依赖项
sudo apt-get install liblapack-dev
sudo apt-get install libsuitesparse-dev
sudo apt-get install libcxsparse3.1.2
sudo apt-get install libgflags-dev
sudo apt-get install libgoogle-glog-dev libgtest-dev
做以下说明:
- 在Ubuntu16.04上应该没有cxsparse3.1.2这个包,应该安装cxsparse3.1.4
- 安装速度可能会非常的慢,这里来个小插曲,说一下如何修改软件源为中科大的源,速度非常快
- 修改/etc/apt/sources.list中的内容为(修改前最好先把该文件复制一份):
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-security main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-updates main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-proposed main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-security main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-updates main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-proposed main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse
- 更新sudo apt-get update
二、编译ceres
下载地址:https://github.com/ceres-solver/ceres-solver
- 解压,并cd到ceres根目录下
mkdir build
cd build
cmake ..
sudo make install
- 安装完成后,ceres头文件目录为/usr/local/include/ceres、库文件为/usr/local/lib/libceres.a,可以自己检查一下
三、使用ceres拟合一条二次曲线
这里简单的介绍一下思路,下一篇博客会详细的介绍一下两种梯度下降方法。
假设有一条曲线满足如下方程: y = e x p ( a x 2 + b x + c ) + w y=exp(ax^2+bx+c)+w y=exp(ax2+bx+c)+w
其中, a , b , c a,b,c a,b,c为曲线的参数, w w w为高斯噪声。
如果我们有N对点(x, y),我们要根据这些点求出曲线的参数,那么问题可以转换为下面的优化问题: m i n a , b , c 1 2 ∑ i = 1 N ∥ y i − e x p ( a x i 2 + b x i + c ) ∥ 2 min_{a,b,c}\frac{1}{2}\sum_{i=1}^{N}\begin{Vmatrix}y_i-exp(ax_i^2+bx_i+c)\end{Vmatrix}^2 mina,b,c21i=1∑N∥∥yi−exp(axi2+bxi+c)∥∥2在上式中,待估计的变量是 a , b , c a,b,c a,b,c。
程序:
#include CMakeLists.txt的内容如下:
cmake_minimum_required( VERSION 2.8 )
project( ceres_curve_fitting )
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" )
# 寻找Ceres库并添加它的头文件
find_package( Ceres REQUIRED )
include_directories( ${CERES_INCLUDE_DIRS} )
# OpenCV
find_package( OpenCV REQUIRED )
include_directories( ${OpenCV_DIRS} )
add_executable( curve_fitting main.cpp )
# 与Ceres和OpenCV链接
target_link_libraries( curve_fitting ${CERES_LIBRARIES} ${OpenCV_LIBS} )
然后编译链接很简单,就不说了。运行结果如下:
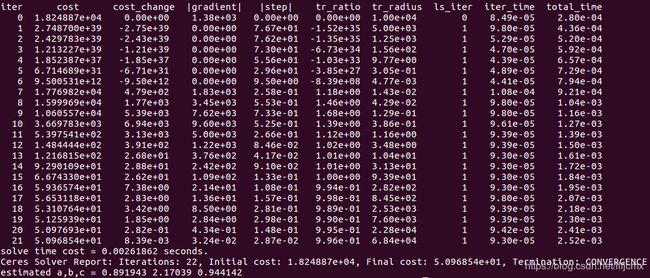
有兴趣的,可以自己把曲线画出来,形象的看一下拟合结果。