视觉SLAM中的李群与李代数
写在前面
首先声明,这篇博客只是高博的《视觉SLAM十四讲》的学习笔记,稍加一些自己的领悟和思考。如果想系统和详细的学习李群与李代数,强烈建议移步。
为什么要使用李群和李代数
三维世界中刚体运动的描述方式,包括旋转矩阵、旋转向量、欧拉角、四元数等若干种方式。在SLAM 中,除了旋转表示之外,还要对它们进行估计和优化。因为在SLAM 中位姿是未知的,而我们需要解决什么样的相机位姿最符合当前观测数据这样的问题。一种典型的方式是把它构建成一个优化问题,求解最优的 R , t R,t R,t,使得误差最小化。
而旋转矩阵自身是带有约束的(正交且行列式为1)。它们作为优化变量时,会引入额外的约束,使优化变得困难。通过李群——李代数间的转换关系,我们希望把位姿估计变成无约束的优化问题,简化求解方式。
群
三维旋转矩阵构成了特殊正交群 S O ( 3 ) SO(3) SO(3)
S O ( 3 ) = { R ∈ R 3 × 3 ∣ R R T = I , d e t ( R ) = 1 } SO(3) = \{R\in\R^{3×3}|RR^T = I,det(R) = 1 \} SO(3)={R∈R3×3∣RRT=I,det(R)=1}
三维变换矩阵构成了特殊欧式群 S E ( 3 ) SE(3) SE(3)
S O ( 3 ) = { T = [ R t 0 1 ] ∈ R 4 × 4 ∣ R ∈ S O ( 3 ) , t ∈ R 3 } SO(3) = \{T=\left[ \begin{matrix} R & t \\ 0 & 1 \end{matrix} \right] \in\R^{4×4}|R\in SO(3),t\in\R^3 \} SO(3)={T=[R0t1]∈R4×4∣R∈SO(3),t∈R3}
注:由于对Latex不熟,编这两个公式就摸索了一段时间,所以后面的公式就直接截图了。有时间最好还是要学学Latex。
指数映射和对数映射的转换关系
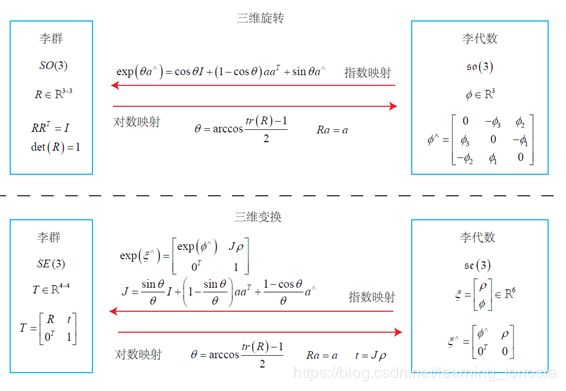
根据上图,就能清晰地看出李群与李代数间的转换关系。
对于指数映射和对射映射的推导,BCH公式近似,李代数求导和扰动模型等内容,就不在此赘述,直接看《视觉SLAM十四讲》就好。
实践
一个较好的李代数库是Strasdat 维护的Sophus 库,安装方法:
git clone https://github.com/strasdat/Sophus.git
cd Sophus
git checkout a621ff
mkdir build
cmake ..
make
演示Sophus 库中的 S O ( 3 ) SO(3) SO(3)和 S E ( 3 ) SE(3) SE(3)运算:
#include 该演示程序为分两部分。前半部分介绍SO(3) 上的操作,后半部分则为SE(3)。演示了如何构造 S O ( 3 ) SO(3) SO(3)和 S E ( 3 ) SE(3) SE(3)对象,对它们进行指数、对数映射,以及当知道更新量后,如何对李群元素进行更新。
为了编译它,请在CMakeLists.txt里添加以下几行:
cmake_minimum_required( VERSION 2.8 )
project( useSophus )
# 为使用 sophus,您需要使用find_package命令找到它
find_package( Sophus REQUIRED )
include_directories( ${Sophus_INCLUDE_DIRS} )
add_executable( useSophus useSophus.cpp )
target_link_libraries( useSophus ${Sophus_LIBRARIES} )
注意:我这里为了方便,直接copy的高博Github上的代码,对于初学者,强烈建议自己手敲一遍代码,并完整的操作一下,不能眼高手低,有些坑是必须要踩的,踩的多了也就成所谓的大佬了。即:无他,唯手熟尔。
总结
李群与李代数,前前后后,学了很多次,每次都有不同的理解。
犹记得第一次接触时,看不动,看不懂。
看的多了,每次重复都能加深理解,关键是不看也不用就忘了,所以在此水一篇,求大佬们轻拍。