视觉SLAM——边缘检测 线段检测 Harris角点检测
前言
本博客为主要学习《计算机视觉——算法与应用》第4章 特征检测与匹配,《OpenCV计算机视觉编程攻略》以及相关知识点的总结与整理。这部分在视觉SLAM十四讲并没有提到,但是很多特征点选取的基础,同时在SLAM算法中也可能会有应用。
主要内容包括:
1、边缘检测算法,常用边缘检测算子
2、直线检测,Hough变换
3、Harris角点检测
边缘检测
边缘定义为亮度剧烈变化的位置。将一幅图像想象为一个高度域,在这样的表面,边缘出现在陡峭斜率上。从数学角度定义一个表面的斜率和方向是通过其梯度实现的:
J ( x ) = Δ I ( x ) = ( ∂ I ∂ x , ∂ I ∂ y ) ( x ) J(x)=\Delta I(x)=(\frac {\partial I}{\partial x},\frac {\partial I}{\partial y})(x) J(x)=ΔI(x)=(∂x∂I,∂y∂I)(x)
求图像的导数强调了高频部分因而放大了噪声,因此在计算梯度前需要使用低通滤波器进行平滑基础,其中高斯函数是唯一可分离的圆对称滤波器。同时,平滑图像和计算图像梯度是可以合并的:不采取对平滑化的结果求导,而是先对内核求导数,然后与图像卷积:
J σ ( x ) = Δ [ G σ ( x ) ∗ I ( x ) ] = [ Δ G σ ( x ) ] ∗ I ( x ) J_{\sigma}(x)=\Delta[G_{\sigma}(x)*I(x)]=[\Delta G_{\sigma}(x)]*I(x) Jσ(x)=Δ[Gσ(x)∗I(x)]=[ΔGσ(x)]∗I(x)
常用的边缘检测算子
1)Roberts:
交叉微分算子(i+1/2,j+1/2):边缘定位较准,对噪声敏感。适用于边缘明显且噪声较少的图像分割,会在图像边缘附近的区域内产生较宽的响应,因此边缘定位不是很准确。
![]()
2)Sobel:
引入了类似局部平均的运算,因此对噪声具有平滑作用,对灰度渐变和噪声较多的图像处理效果较好,但是对边缘定位比较准确,当精度要求不是很高时是一种常用的方法。
3)Prewitt
对噪声相对不敏感,有抑制噪声作用。但是像素平均相当于对图像的低通滤波,所以对边缘的定位不如Roberts算子。

4)Kirsch:
对灰度渐变和噪声较多的图像处理效果较好。
5)Canny:
通常基于Sobel算子,使用两种不同的阈值分别检测强边缘和弱边缘,在低阈值边缘分布图上只保留有连续路径的边缘点,然后把这些边缘点连接到属于高阈值分布图的边缘上。不易受噪声干扰,能够检测到真正的弱边缘。
6)Laplacian:
一种二阶导数算子,对图像中的阶跃性边缘点定位准确,对噪声比较敏感,常用来判断边缘像素视为与图像的明区还是暗区。在边缘处产生一个陡峭的零交叉,是各向同性的,能对任何走向的界线和线条进行锐化。

直线检测
这里主要介绍基于Hough变换的直线检测方法,此外还存在基于逐次近似拟合、基于RANSAC的直线检测方法等。
霍夫线变换
直线可以使用Hesse法线式进行表示: r = x c o s θ + y s i n θ r=xcosθ+ysinθ r=xcosθ+ysinθ
其中r是原点到直线上最近点的距离,θ是x轴与连接原点和最近点直线之间的夹角,如图1所示。

这个表达式可以将图像中每一条直线与一对参数(r,θ)相关联,这个参数平面被称为霍夫空间。经过霍夫变换,将图像空间中的一个点映射到霍夫空间中,将得到一条正弦曲线。那么多个点形成的直线将产生在(r,θ)处交叉的一组正弦曲线。

具体实现:通过将霍夫参数空间量化为有限间隔的累加器来实现。随着算法的运行,每个算法都把 ( x i , y i ) (x_i,y_i) (xi,yi)转换为一个离散化的 ( r , θ ) (r,θ) (r,θ)曲线,并且沿着这条曲线的累加器单元被递增。当图像空间中所有的像素都经过霍夫变换后,对累加器阵列进行检查,计数值最大的网格(或超过阈值的网格),其坐标值(ρ0, θ0)就对应图像空间中所求的直线。
霍夫变换的优点:
使用基于投票的方法,抗干扰能力强。对图像中直线的殘缺部分、噪声等不敏感。
霍夫变换的缺点:
1)时间复杂度和空间复杂度都很高,当霍夫空间由2维拓展到3维空间或者更高的维度时,计算复杂度几何增长。
2)霍夫参数空间离散化的颗粒度(分辨率)与累加器的阈值(最小投票数)选取困难。
3)在检测过程中只能确定直线方向,丢失了线段的长度信息。
概率霍夫变换对基本算法做了一些修正:首先概率霍夫变换在二值分布图上随机选择像素点,而不是逐行扫描图像。一旦累加器某个入口达到预设最小值,就沿着直线扫描图像,并移除这条直线上的所有像素点,这个扫描过程还可以检测接受的线段长度。
霍夫圆变换
圆的参数方程为 ( x − a ) 2 + ( y − b ) 2 = r 2 (x-a)^2+(y-b)^2=r^2 (x−a)2+(y−b)2=r2,该方程包含三个参数,传统霍夫变换需要使用三维累加器。
其中OpenCV中采用了霍夫梯度法:先是使用二维累加器找圆心位置,再确定半径。
检测圆心的原理是圆心是其所在圆周所有法线的交点,对每个像素点来说,累加器只对沿着梯度方向的入口增加计数,(根据预先定义的最大和最小半径);一旦检测到圆心,建立半径值范围的一维直方图,这个直方图的尖峰值就是被检测圆的半径。
角点检测
角点,即拥有至少两个不同方向梯度的图像块,适合作为特征在其他图像中被匹配与跟踪。如果将一个局部的小窗口在各个方向上进行移动,窗口中区域的灰度发生较大变化,则认为是角点。
可以使用加权差的平方和来比较一个图像块与其移动后 ( Δ x , Δ y ) (\Delta x,\Delta y) (Δx,Δy)的变化,即自相关函数:
c ( x , y , Δ x , Δ y ) = ∑ ( u , v ) ∈ W ( x , y ) w ( u , v ) ( I ( u , v ) − I ( u + Δ x , v + Δ y ) ) 2 c(x,y,\Delta x,\Delta y) = \sum_{(u,v)\in W(x,y)}w(u,v)(I(u,v)-I(u+\Delta x,v+\Delta y))^2 c(x,y,Δx,Δy)=(u,v)∈W(x,y)∑w(u,v)(I(u,v)−I(u+Δx,v+Δy))2
其中, W ( x , y ) W(x,y) W(x,y)是以点(x,y)为中心的窗口, w ( u , v ) w(u,v) w(u,v)是高斯加权函数。根据泰勒展开有:
I ( u + Δ x , v + Δ y ) = I ( u , v ) + I x ( u , v ) Δ x + I y ( u , v ) Δ y + O ( Δ x 2 , Δ y 2 ) I(u+\Delta x,v+\Delta y) = I(u,v)+I_x(u,v)\Delta x + I_y(u,v) \Delta y+O(\Delta x^2,\Delta y^2) I(u+Δx,v+Δy)=I(u,v)+Ix(u,v)Δx+Iy(u,v)Δy+O(Δx2,Δy2)
其中 I x , I y I_x,I_y Ix,Iy为图像 I ( x , y ) I(x,y) I(x,y)的偏导数,自相关函数可简化为:
c ( x , y , Δ x , Δ y ) = ∑ w w ( u , v ) ( I x ( u , v ) Δ x + I y ( u , v ) Δ y ) 2 = [ Δ x , Δ y ] M ( x , y ) [ Δ x Δ y ] c(x,y,\Delta x,\Delta y) = \sum_{w}w(u,v)(I_x(u,v)\Delta x + I_y(u,v) \Delta y)^2 = [\Delta x,\Delta y]M(x,y)\begin{bmatrix} \Delta x\\ \Delta y \end{bmatrix} c(x,y,Δx,Δy)=w∑w(u,v)(Ix(u,v)Δx+Iy(u,v)Δy)2=[Δx,Δy]M(x,y)[ΔxΔy]
其中
M ( x , y ) = ∑ w w ( u , v ) [ I x ( x , y ) 2 I x ( x , y ) I y ( x , y ) I x ( x , y ) I y ( x , y ) I y ( x , y ) 2 ] = w ∗ [ I x 2 I x I y I x I y I y 2 ] M(x,y) = \sum_{w}w(u,v) \begin{bmatrix} I_x(x,y)^2 & I_x(x,y)I_y(x,y)\\I_x(x,y)I_y(x,y) & I_y(x,y)^2 \end{bmatrix} = w*\begin{bmatrix} I_x^2 & I_xI_y\\I_xI_y & I_y^2 \end{bmatrix} M(x,y)=w∑w(u,v)[Ix(x,y)2Ix(x,y)Iy(x,y)Ix(x,y)Iy(x,y)Iy(x,y)2]=w∗[Ix2IxIyIxIyIy2]
可以使用加权核w进行离散卷积来替换其中的加权求和。这里可以看到图像 I ( x , y ) I(x,y) I(x,y)在点(x,y)的自相关函数可以近似为二次项函数:
c ( x , y , Δ x , Δ y ) ≈ A Δ x 2 + 2 C Δ x Δ y + B Δ y 2 c(x,y,\Delta x,\Delta y) \approx A\Delta x^2+2C\Delta x \Delta y+B\Delta y^2 c(x,y,Δx,Δy)≈AΔx2+2CΔxΔy+BΔy2
其中
A = w ∗ I x 2 , B = w ∗ I x I y , C = w ∗ I y 2 A = w*I_x^2,B=w*I_xI_y,C=w*I_y^2 A=w∗Ix2,B=w∗IxIy,C=w∗Iy2
对 M ( x , y ) M(x,y) M(x,y)进行特征值分析,可以产生两个特征值 ( λ 1 , λ 2 ) (λ_1,λ_2) (λ1,λ2)及对应的特征向量,其中较大的不确定度取决于较小的特征值,因此通过寻找较小特征值的最大值可以用于寻找特征。
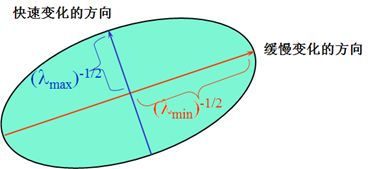
对于不确定性椭圆与图像中的角点、直线与平面有以下三种情况:
1)直线:一个特征值大,一个特征值小,说明自相关函数值在某一方向大,其他方向小;
2)平面:两个特征值都小,且近似相对,说明自相关函数在各个方向都小;
3)角点:两个特征值都大,且近似相等,说明自相关函数在所有方向都大。
其中Harris给出的角点检测方法不需要具体计算特征值,而是计算一个角点相应值R来判断角点:
R = d e t ( M ) − α t r a c e ( M ) 2 = λ 1 ∗ λ 2 − α ( λ 1 + λ 2 ) 2 R = det(M)-\alpha trace(M)^2=λ_1*λ_2- \alpha (λ_1+λ_2)^2 R=det(M)−αtrace(M)2=λ1∗λ2−α(λ1+λ2)2
其中
d e t ( M ) = λ 1 ∗ λ 2 = A C − B 2 , t r a c e ( M ) = λ 1 + λ 2 = A + C , α 一 般 可 取 0.05 det(M) = λ_1*λ_2 = AC-B^2,trace(M) = λ_1+λ_2 = A+C,\alpha 一般可取0.05 det(M)=λ1∗λ2=AC−B2,trace(M)=λ1+λ2=A+C,α一般可取0.05
最后需在3×3或5×5的邻域内进行非最大值抑制,局部最大值点即为图像中的角点。
Harris角点的特点:对亮度和对比度变化不敏感,具有旋转不变性,不具有尺度不变性。