聚类分析学习(二)DBSCAN算法学习
一.DBSCAN算法简介
1.DBSCAN算法是一个比较有代表性的基于密度的聚类算法。
2.与划分和层次聚类方法不同,它将簇定义为密度相连的点的最大集合,能够把具有足够高密度的区域划分为簇,并可在噪声的空间数据库中发现任意形状的聚类。
3.基于密度的聚类算法的优点
(1)可以发现任意形状的簇。
划分方法和层次方法旨在发现球状簇,它们很难发现任意形状的簇。为了发现任意形状的簇,我们把簇看作数据空间中被稀疏区域分开的稠密区域,即基于密度的聚类算法可发现任意形状的簇,这对于有噪声点的数据有重要作用。
(2)可以处理噪声点。 (对噪声数据不敏感)
(3)一次扫描。
(4)需要密度参数作为终止条件。
4.基于密度的聚类算法的依据是数据集在空间上的稠密程度,无需事先设定簇的数量。因此特别适合对于未知内容的数据集进行聚类。
5.传统基于中心的密度定义
数据集中特定点的密度通过该点E半径内点的个数估计。显然,密度依赖于半径E。
二.算法中的定义
1.Ε邻域:给定对象半径为Ε内的区域称为该对象的Ε邻域。
2.核心对象:如果给定对象Ε邻域内的样本点数大于等于MinPts,则称该对象为核心对象。
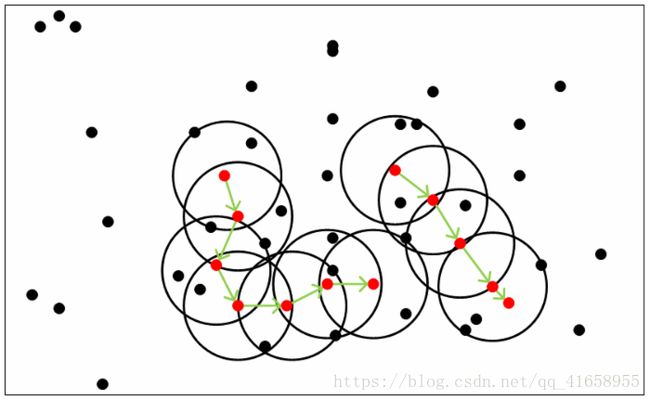
3.直接密度可达:对于样本集合D,如果样本点q在p的Ε邻域内,并且p为核心对象,那么对象q从对象p直接密度可达。
4.密度可达:对于样本集合D,给定一串样本点p1,p2….pn,p= p1,q= pn,假如对象pi从pi-1直接密度可达,那么对象q从对象p密度可达。
5. 密度相连:存在样本集合D中的一点o,如果对象o到对象p和对象q都是密度可达的,那么p和q密度相连。
6.密度可达是直接密度可达的传递闭包,并且这种关系是非对称的。密度相连是对称关系。
DBSCAN目的是找到密度相连对象的最大集合。
(关于floyd和传递闭包的概念理解参见博客:https://blog.csdn.net/qq_41658955/article/details/81558339)
(1)传递闭包:设R是X上的二元关系,如果另一个关系R1满足:R1是传递的,R是R1的子集,对于任何可传递关系R11如果有R是R11的子集,就有R1是R11的子集。则称R1是R的传递闭包。即对于一个关系的一个最小的传递关系。
(2)现在我们来根据(1)中传递闭包的概念推理证明一下:密度可达是不是直接密度可达的传递闭包。(结论A)
假设R1=对象q到p密度可达;R=对于一系列样本点p1,p2,...,pn,pi到pi-1直接密度可达,p=p1,q=pn。那么我们假设要证明的结论A成立。根据(1)必然满足:
(a)q到p密度可达关系是传递的。(满足)
(b)直接密度可达是密度可达的子集。(满足)
(c)对于任何可传递关系A,有pi到pi-1 直接密度可达是A的子集,则有q到p密度可达是A的子集。
【密度可达非对称的含义是:假设两个对象p和q并且p到q密度可达,但是不一定满足q到p也密度可达,称为非对称关系。
密度相连对称的含义:假设两个对象p和q并且p到q密度相连,一定满足q到p也密度相连,称为对称关系。】
7.噪声:一个基于密度的簇是基于密度可达性的最大的密度相连对象的集合,不包含在任何簇中的对象被称为噪声。
8.边界点:该点不是核心对象,但是落在核心对象的某个邻域内,被称为边界点。【根据这个定义,噪声即不是核心对象也不是和核心点的对象】
三.算法指导思想和步骤
(1)指导思想
密度聚类算法的指导思想是:只要一个区域中点的密度超过某个域值,就把它加到与之相邻的聚类中去。
对于簇中的每个对象,在给定半径E的邻域中至少要包含最小数目(minPts)个对象。
(2)算法的输入输出:
1.输入:输入包含n个对象的数据库D,扫描半径eps和最小包含点数minPts。
2.输出:所有生成的簇,达到密度要求。
(3)DBSCAN需要二个参数: 扫描半径 (eps)和最小包含点数(minPts)。
任选一个未被访问(unvisited)的点开始,找出与其距离在eps之内(包括eps)的所有附近点。
1.如果 附近点的数量 ≥ minPts,则当前点与其附近点形成一个簇,并且出发点被标记为已访问(visited)。 然后递归,以相同的方法处理该簇内所有未被标记为已访问(visited)的点,从而对簇进行扩展。
2.如果 附近点的数量 < minPts,则该点暂时被标记作为噪声点。
3.如果簇充分地被扩展,即簇内的所有点被标记为已访问,然后用同样的算法去处理未被访问的点。
四.具体算法描述
(1)检测数据库中尚未检查过的对象p,如果p未被处理(归为某个簇或者标记为噪声),则检查其邻域,若包含的对象数不小于minPts,建立新簇C,将其中的所有点加入候选集N;
(2)对候选集N 中所有尚未被处理的对象q,检查其邻域,若至少包含minPts个对象,则将这些对象加入N;如果q 未归入任何一个簇,则将q 加入C;
(3)重复步骤2),继续检查N 中未处理的对象,当前候选集N为空;
(4)重复步骤1)~3),直到所有对象都归入了某个簇或标记为噪声。
五.算法复杂度分析
1.时间复杂度:算法要对每个对象邻域进行检查,因此时间性能较低。
(1)基本时间复杂度为O(n*t)【t是找出eps邻域中的点需要的时间】
(2)最坏情况下时间复杂度为O(n^2)
(3)在低维空间数据中,一些数据结构如KD树,可以有效检索特定点给定距离内的所有点。从而可以使时间复杂度降低到O(n*logn)
2.空间复杂度:在聚类过程中,DBSCAN一旦找到一个核心对象,就以该核心对象为中心向外扩展,此过程中核心对象将不断增多,没有处理的对象被保存在内存里。若数据库中存在庞大的聚类,将需要很大的内存来储存核心对象的信息,其需求难以预料。
(1)当数据量增大时,将需要庞大的内存支持,I/O消耗也很大。
(2)低维或高维数据中,其空间复杂度都是O(n)
六.DBSCAN算法的缺点
(1)输入参数敏感,确定两个参数E和minPts困难。选取不当易造成聚类质量下降。
(2)在算法中,两个参数E和minPts全局唯一。当空间聚类的密度不均匀,聚类之间距离相差很大时,聚类质量较差。
(3)当数据量大时,计算密度单元的计算复杂度大,需要建立空间索引来降低计算量,如KD树。
(4)对数据维数的伸缩性较差。这类方法需要扫描整个数据库,每个数据对象都可能引起一次查询,因此当数据量大的时候会造成频繁的I/O操作。
七.matlab程序实现
(1)matlab主程序
%% DBSCAN
clear all;
clc;
%% 导入数据集
% data = load('testData.txt');
data = load('testData_2.txt');
% 定义参数Eps和MinPts
MinPts = 5;
Eps = epsilon(data, MinPts);
[m,n] = size(data);%得到数据的大小
x = [(1:m)' data];
[m,n] = size(x);%重新计算数据集的大小
types = zeros(1,m);%用于区分核心点1,边界点0和噪音点-1
dealed = zeros(m,1);%用于判断该点是否处理过,0表示未处理过
dis = calDistance(x(:,2:n));
number = 1;%用于标记类
%% 对每一个点进行处理
for i = 1:m
%找到未处理的点
if dealed(i) == 0
xTemp = x(i,:);
D = dis(i,:);%取得第i个点到其他所有点的距离
ind = find(D<=Eps);%找到半径Eps内的所有点
%% 区分点的类型
%边界点
if length(ind) > 1 && length(ind) < MinPts+1
types(i) = 0;
class(i) = 0;
end
%噪音点
if length(ind) == 1
types(i) = -1;
class(i) = -1;
dealed(i) = 1;
end
%核心点(此处是关键步骤)
if length(ind) >= MinPts+1
types(xTemp(1,1)) = 1;
class(ind) = number;
% 判断核心点是否密度可达
while ~isempty(ind)
yTemp = x(ind(1),:);
dealed(ind(1)) = 1;
ind(1) = [];
D = dis(yTemp(1,1),:);%找到与ind(1)之间的距离
ind_1 = find(D<=Eps);
if length(ind_1)>1%处理非噪音点
class(ind_1) = number;
if length(ind_1) >= MinPts+1
types(yTemp(1,1)) = 1;
else
types(yTemp(1,1)) = 0;
end
for j=1:length(ind_1)
if dealed(ind_1(j)) == 0
dealed(ind_1(j)) = 1;
ind=[ind ind_1(j)];
class(ind_1(j))=number;
end
end
end
end
number = number + 1;
end
end
end
% 最后处理所有未分类的点为噪音点
ind_2 = find(class==0);
class(ind_2) = -1;
types(ind_2) = -1;
%% 画出最终的聚类图
hold on
for i = 1:m
if class(i) == -1
plot(data(i,1),data(i,2),'.r');
elseif class(i) == 1
if types(i) == 1
plot(data(i,1),data(i,2),'+b');
else
plot(data(i,1),data(i,2),'.b');
end
elseif class(i) == 2
if types(i) == 1
plot(data(i,1),data(i,2),'+g');
else
plot(data(i,1),data(i,2),'.g');
end
elseif class(i) == 3
if types(i) == 1
plot(data(i,1),data(i,2),'+c');
else
plot(data(i,1),data(i,2),'.c');
end
else
if types(i) == 1
plot(data(i,1),data(i,2),'+k');
else
plot(data(i,1),data(i,2),'.k');
end
end
end
hold off
(2)距离计算函数
%% 计算矩阵中点与点之间的距离
function [ dis ] = calDistance( x )
[m,n] = size(x);
dis = zeros(m,m);
for i = 1:m
for j = i:m
%计算点i和点j之间的欧式距离
tmp =0;
for k = 1:n
tmp = tmp+(x(i,k)-x(j,k)).^2;
end
dis(i,j) = sqrt(tmp);
dis(j,i) = dis(i,j);
end
end
end
(3)epsilon函数
function [Eps]=epsilon(x,k)
% Function: [Eps]=epsilon(x,k)
%
% Aim:
% Analytical way of estimating neighborhood radius for DBSCAN
%
% Input:
% x - data matrix (m,n); m-objects, n-variables
% k - number of objects in a neighborhood of an object
% (minimal number of objects considered as a cluster)
[m,n]=size(x);
Eps=((prod(max(x)-min(x))*k*gamma(.5*n+1))/(m*sqrt(pi.^n))).^(1/n);
八.python程序实现
# scoding=utf-8
import pylab as pl
from collections import defaultdict,Counter
points = [[int(eachpoint.split("#")[0]), int(eachpoint.split("#")[1])] for eachpoint in open("points","r")]
# 计算每个数据点相邻的数据点,邻域定义为以该点为中心以边长为2*EPs的网格
Eps = 10
surroundPoints = defaultdict(list)
for idx1,point1 in enumerate(points):
for idx2,point2 in enumerate(points):
if (idx1 < idx2):
if(abs(point1[0]-point2[0])<=Eps and abs(point1[1]-point2[1])<=Eps):
surroundPoints[idx1].append(idx2)
surroundPoints[idx2].append(idx1)
# 定义邻域内相邻的数据点的个数大于4的为核心点
MinPts = 5
corePointIdx = [pointIdx for pointIdx,surPointIdxs in surroundPoints.iteritems() if len(surPointIdxs)>=MinPts]
# 邻域内包含某个核心点的非核心点,定义为边界点
borderPointIdx = []
for pointIdx,surPointIdxs in surroundPoints.iteritems():
if (pointIdx not in corePointIdx):
for onesurPointIdx in surPointIdxs:
if onesurPointIdx in corePointIdx:
borderPointIdx.append(pointIdx)
break
# 噪音点既不是边界点也不是核心点
noisePointIdx = [pointIdx for pointIdx in range(len(points)) if pointIdx not in corePointIdx and pointIdx not in borderPointIdx]
corePoint = [points[pointIdx] for pointIdx in corePointIdx]
borderPoint = [points[pointIdx] for pointIdx in borderPointIdx]
noisePoint = [points[pointIdx] for pointIdx in noisePointIdx]
# pl.plot([eachpoint[0] for eachpoint in corePoint], [eachpoint[1] for eachpoint in corePoint], 'or')
# pl.plot([eachpoint[0] for eachpoint in borderPoint], [eachpoint[1] for eachpoint in borderPoint], 'oy')
# pl.plot([eachpoint[0] for eachpoint in noisePoint], [eachpoint[1] for eachpoint in noisePoint], 'ok')
groups = [idx for idx in range(len(points))]
# 各个核心点与其邻域内的所有核心点放在同一个簇中
for pointidx,surroundIdxs in surroundPoints.iteritems():
for oneSurroundIdx in surroundIdxs:
if (pointidx in corePointIdx and oneSurroundIdx in corePointIdx and pointidx < oneSurroundIdx):
for idx in range(len(groups)):
if groups[idx] == groups[oneSurroundIdx]:
groups[idx] = groups[pointidx]
# 边界点跟其邻域内的某个核心点放在同一个簇中
for pointidx,surroundIdxs in surroundPoints.iteritems():
for oneSurroundIdx in surroundIdxs:
if (pointidx in borderPointIdx and oneSurroundIdx in corePointIdx):
groups[pointidx] = groups[oneSurroundIdx]
break
# 取簇规模最大的5个簇
wantGroupNum = 3
finalGroup = Counter(groups).most_common(3)
finalGroup = [onecount[0] for onecount in finalGroup]
group1 = [points[idx] for idx in xrange(len(points)) if groups[idx]==finalGroup[0]]
group2 = [points[idx] for idx in xrange(len(points)) if groups[idx]==finalGroup[1]]
group3 = [points[idx] for idx in xrange(len(points)) if groups[idx]==finalGroup[2]]
pl.plot([eachpoint[0] for eachpoint in group1], [eachpoint[1] for eachpoint in group1], 'or')
pl.plot([eachpoint[0] for eachpoint in group2], [eachpoint[1] for eachpoint in group2], 'oy')
pl.plot([eachpoint[0] for eachpoint in group3], [eachpoint[1] for eachpoint in group3], 'og')
# 打印噪音点,黑色
pl.plot([eachpoint[0] for eachpoint in noisePoint], [eachpoint[1] for eachpoint in noisePoint], 'ok')
pl.show()
九.C++程序实现
// DBSCAN.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include
#include
#include
#include
#include
#include
#include
using namespace std;
#define DBPOINTTYPE int
class dbscan
{
public:
enum DBState{ unlabeled, core, border, noise };//数据点当前的状态
struct DBPoint
{
int dim;//数据点的维数
DBState state;
vectordata;
vectornear;//该点直接密度可达的点的集合,以dataset索引方式存储
DBPoint(unsigned int d) :dim(d)
{
state = unlabeled;
}
};
struct DBCluster
{
int label;//该簇的标号
setborder;//该簇边界点的集合,以dataset索引方式存储
setcore;//该簇核心点的集合,以dataset索引方式存储
};
public:
dbscan(int minpts, double rad) :MinPts(minpts), radius(rad)
{
time_t t;
srand(time(&t));
}
~dbscan();
void apply();
void generate_dataset(int datasetsize, int Y, int X);
void showresult(){
for (int i = 0; i < clusters.size(); i++)
{
char string[100];
sprintf(string, "第个%d簇:", i);
cout << string << endl;
cout << "核心:" << endl;
for (et::iterator it = clusters[i]->core.begin(); it != clusters[i]->core.end(); it++)
{
sprintf(string, "编号%d ", *it);
cout << tring << "(" << dataset[*(it)].data[0] << "," << dataset[*(it)].data[1] << ")" << endl;
}
cout << "边界:" << endl;
for (se::iterator it = clusters[i]->border.begin(); it != clusters[i]->border.end(); it++)
{
sprintf(string, "编号%d ", *it);
cout << string < *it << "(" << dataset[*(it)].data[0] << "," << dataset[*(it)].data[1] << ")" << endl;
}
cout << endl << endl;
}
}
private:
int MinPts;
double radius;
vectordataset;
vectorclusters;
private:
//bool isdensityconnected(DBCluster&cluster1, DBCluster&cluster2);//密度相连
bool iscore(DBPoint&point);
bool iscore(int k);
double distance(DBPoint&point1, DBPoint&point2)
{
double dis = 0;
for (int i = 0; i < point1.dim; i++)
dis += pow(point1.data[i] - point2.data[i], 2.0);
return sqrt(dis);
}
void expand(int i, DBCluster*clus);
void mergecluster(int k1, int k2);//合并密度相连的两个簇
};
void dbscan::mergecluster(int k1, int k2)
{
clusters[k1]->core.insert(clusters[k2]->core.begin(), clusters[k2]->core.end());
clusters[k1]->border.insert(clusters[k2]->border.begin(), clusters[k2->border.end());
for (int i = k2 + 1; i < clusters.size(); i++)
clusters[i]->label--;
}
void dbscan::generate_dataset(int datasetsize, int Y, int X)
{
for (int i = 0; i < datasetsize; i++)
{
DBPoint point(2);
point.data.resize(2);
point.data[0] = X*double(rand()) / double(RAND_MAX + 1.0);
point.data[1] = Y*double(rand()) / double(RAND_MAX + 1.0);
dataset.push_back(point);
}
}
void dbscan::apply()
{
int k = 0;
while (k < dataset.size() - 1)
{
for (int i = k + 1; i < dataset.size(); i++)
{
double dis = distance(dataset[k], dataset[i]);
if (dis < radius)
{
dataset[k].near.push_back(i);
dataset[i].near.push_back(k);
}
}
k++;
}
for (int i = 0; i < dataset.size(); i++) {
if (iscore(dataset[i]) && dataset[i].state == unlabeled)
{
DBCluster*clus = new DBCluster;
clus->label = clusters.size();
expand(i, clus);
clusters.push_back(clus);
}
}
for (int i = 0; i < dataset.size(); i++)
{
if (dataset[i].state == unlabeled)
dataset[i].state = noise;
}
/*k = 0;
while (k < clusters.size() - 1)//合并密度相连的集合
{
for (int i = k + 1; i < clusters.size(); i++)
{
if (!clusters[i]->core.empty() && !clusters[k]->core.empty())
{
setaa;
//insert_iterator > >res_ins(aa, aa.begin());
set_union(clusters[i]->border.begin(), clusters[i]->border.end(),//求并集
clusters[k]->border.begin(), clusters[k]->border.end(), inserter(aa, aa.begin()));
if (aa.size() != clusters[i]->border.size() + clusters[k]->border.size())//密度连
mergecluster(k, i);
}
}
}
for (int i = 0; i < clusters.size(); i++)
{
if (clusters[i]->core.empty())
{
delete clusters[i];
clusters.erase(clusters.begin() + i, clusters.begin() + i + 1);
}
}*/
//下面验证一下结果
int sum = 0;
for (int i = 0; i < clusters.size(); i++)
{
sum += clusters[i]->border.size() + clusters[i]->core.size();
}
for (int i = 0; i < dataset.size(); i++)
{
if (dataset[i].state == noise)
sum++;
}
_ASSERTE(sum == dataset.size());
}
bool dbscan::iscore(DBPoint&point)
{
return point.near.size() >= MinPts;
}
bool dbscan::iscore(int k)
{
return dataset[k].near.size() >= MinPts;
}
/*void dbscan::expand(int k, DBCluster*clus)
{
if (clus->core.find(k) == clus->core.end())
{
clus->core.insert(k);//直接密度可达或者密度可达
dataset[k].state = core;
for (int i = 0; i < dataset[k].near.size(); i++)
{
if (!iscore(dataset[k].near[i]) && clus->border.find(i) == clus->border.end())
{
clus->border.insert(dataset[k].near[i]);//直接密度可达
dataset[i].state = border;
}
if (iscore(dataset[k].near[i]))
expand(dataset[k].near[i], clus);
}
}
}*/
void dbscan::expand(int k, DBCluster*clus)
{
vectoraa, bb;
aa.push_back(k);
while (!aa.empty())
{
int gg = aa.back();
aa.pop_back();
if (iscore(dataset[gg]) && clus->core.find(gg) == clus->core.end())
{
clus->core.insert(gg);
dataset[gg].state = core;
for (int i = 0; i < dataset[gg].near.size(); i++)//只有核心对象可以扩展
{
if (dataset[dataset[gg].near[i]].state == unlabeled)
aa.insert(aa.end(), dataset[gg].near[i]);
}
}
else if (!iscore(dataset[gg]) && clus->border.find(gg) ==clus->border.end())
{
clus->border.insert(gg);
dataset[gg].state = border;
}
}
}
dbscan::~dbscan()
{
for (int i = 0; i < clusters.size(); i++)
delete clusters[i];
}
int _tmain(int argc, _TCHAR* argv[])
{
/*setaa;
aa.insert(10);
aa.insert(25);
aa.insert(35); aa.insert(5);
setbb;
bb.insert(10);
bb.insert(25);
bb.insert(35); bb.insert(99);
setcc;
set_union(aa.begin(), aa.end(), bb.begin(), bb.end(), inserter(cc, cc.begin()));
vectordd;
dd.push_back(24);
dd.insert(dd.begin(), aa.begin(), aa.end());
setee;
ee.insert(10);
ee.insert(250);
aa.insert(ee.begin(), ee.end());
set::iterator it;
for (it = aa.begin(); it != aa.end(); it++)
cout << *it << endl;*/
dbscan db(4, 10);
db.generate_dataset(100, 100, 100);
db.apply();
db.showresult();
system("pause");
return 0;
}
十.推荐博客学习(替大佬打一波广告)
https://blog.csdn.net/u014688145/article/details/53388649