向量点乘叉乘等理解和应用
1.标量和矢量
2(1,2,3) = (2,4,6)
(2,4,6)/2=(1,2,3)
2.矢量和矢量的加减
三角形定则解决向量加减的方法:将各个向量依次首尾顺次相接,结果为第一个向量的起点指向最后一个向量的终点。
平行四边形定则解决向量加法的方法:将两个向量平移至公共起点,以向量的两条边作平行四边形,
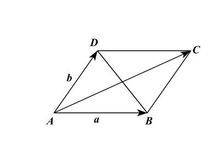
向量的加法
结果为公共起点的对角线。
平行四边形定则解决向量减法的方法:将两个向量平移至公共起点,以向量的两条边作平行四边形,结果由减向量的终点指向被减向量的终点。
(平行四边形定则只适用于两个非零非共线向量的加减。)
坐标系解向量加减法:
在直角坐标系里面,定义原点为向量的起点.两个向量和与差的坐标分别等于这两个向量相应坐标的和与差若向量的表示为(x,y)形式,
A(X1,Y1) B(X2,Y2),则A+B=(X1+X2,Y1+Y2),A-B=(X2-X1,Y2-Y1)
简单地讲:向量的加减就是向量对应分量的加减。类似于物理的正交分解。
(1,2,3) +(2,4,6) = (3,6,9)
(3,6,9)-(2,4,6)=(1,2,3)
A向量-B向量 = 由B指向A 的向量
A 点-B点= B点指向A点的向量
想得到人指向相机的向量 = 相机位置- 人位置 (假设人为原点)
void Start () {
player = GameObject.FindGameObjectWithTag(GameTag.player).transform;
offset = transform.position - player.position;
}
3.向量模 Vector3.magnitude
空间向量(x,y,z),其中x,y,z分别是三轴上的坐标,模长是:
![]()
立方体的体对角线长度
4.向量点乘
代数定义
设二维空间内有两个向量
![]() 和
和![]() ,定义它们的数量积(又叫内积、点积)为以下实数:
,定义它们的数量积(又叫内积、点积)为以下实数:
![]()
更一般地,n维向量的内积定义如下:
![]()
几何定义
设二维空间内有两个向量
![]() 和
和 ![]() ,它们的夹角为
,它们的夹角为![]() ,则内积定义为以下实数:[2]
,则内积定义为以下实数:[2]
![]()
该定义只对二维和三维空间有效。
这个运算可以简单地理解为:在点积运算中,第一个向量投影到第二个向量上(这里,向量的顺序是不重要的,点积运算是可交换的),然后通过除以它们的标量长度来“标准化”。这样,这个分数一定是小于等于1的,可以简单地转化成一个角度值。
点乘又叫向量的内积、数量积,是一个向量和它在另一个向量上的投影的长度的乘积;是标量。
点乘反映着两个向量的“相似度”,两个向量越“相似”,它们的点乘越大。
dot(a,b) a * b = |a| * |b| * cosθ
![]() cosθ 的值 在 0-90度 a * b = |a| * |b| * cosθ >0
cosθ 的值 在 0-90度 a * b = |a| * |b| * cosθ >0
90度 a * b = |a| * |b| * cosθ = 0
90-180度 a * b = |a| * |b| * cosθ < 0

1.图形学中表示光照强度

当a 和e 都是单位向量时 a * b = |a| * |b| * cosθ = cosθ
float3 normalDir = normalize(mul(v.normal,_World2Object)); //模型空间到世界空间 方向转换 矩阵--_World2object
fixed3 lightDir = normalize(_WorldSpaceLightPos0.xyz) ; // ,平行光,对顶点来说,光位置就是光方向
// LightColor0.rgb 平行光颜色 _Diffuse.rgb 自定义颜色 , 标准化的向量点积求出 cosθ ,
//使用 cosθ 表示光强,和法线垂直最亮,平行最暗
float3 diffuse = _LightColor0.rgb*max(dot(normalDir,lightDir),0)*_Diffuse.rgb;
2.位置判断
float c = Vector3.Dot (a, b);
通过点积的计算我们可以简单粗略的判断当前物体是否朝向另外一个物体: 只需要计算当前物体的transform.forward向量与 (otherObj.transform.position – transform.position)的点积即可, 大于0则面对,否则则背对着。
或者,通过点积后的大小判断向量夹角是锐角,钝角,还是直角
5.向量叉乘
a ∧ b = |a| * |b| * sinθ
(a,b,c)×(x,y,z)=(bz-cy,cx-az,ay-bx)
向量积被定义为:
模长:(在这里θ表示两向量之间的夹角(共起点的前提下)(0° ≤ θ ≤ 180°),它位于这两个矢量所定义的平面上。)
方向:a向量与b向量的向量积的方向与这两个向量所在平面垂直,且遵守右手定则。(一个简单的确定满足“右手定则”的结果向量的方向的方法是这样的:若坐标系是满足右手定则的,当右手的四指从a以不超过180度的转角转向b时,竖起的大拇指指向是c的方向。c = a ∧ b)

叉积的定义:c =a x b 其中a,b,c均为向量。即两个向量的叉积得到的还是向量!
性质1:c⊥a,c⊥b,即向量c垂直与向量a,b所在的平面。
性质2:模长|c|=|a||b|sin
性质3:满足右手法则。从这点我们有axb ≠ bxa,而axb = – bxa。所以我们可以使用叉积的正负值来判断向量a,b的相对位置,即向量b是处于向量a的顺时针方向还是逆时针方向。
在力学里,用叉积表示一个力对 一个定点的矩M=r×F,当F与向径r不垂直时,二者有个夹角θ,那么︱M︱=︱r︱︱F︱sinθ,力 矩M是向量,总之,外积就是,产生一个新向量,其方向垂直于由向量AB,向量CD确定的平面,其方向由右手定则确定。
1 .计算出两个向量的夹角。
下面是示例代码:
[csharp] view plain copy
using UnityEngine;
using System.Collections;
public class MainScript : MonoBehaviour
{ //向量a
private Vector3 a;
//向量b
private Vector3 b;
void Start ()
{
//向量的初始化
a = new Vector3 (1, 2, 1);
b = new Vector3 (5, 6, 0);
}
void OnGUI ()
{
//点积的返回值
float c = Vector3.Dot (a, b);
//向量a,b的夹角,得到的值为弧度,我们将其转换为角度,便于查看!
float angle = Mathf.Acos (Vector3.Dot (a.normalized, b.normalized)) * Mathf.Rad2Deg;
GUILayout.Label ("向量a,b的点积为:" + c);
GUILayout.Label ("向量a,b的夹角为:" + angle);
//叉积的返回值
Vector3 e = Vector3.Cross (a, b);
Vector3 d = Vector3.Cross (b, a);
//向量a,b的夹角,得到的值为弧度,我们将其转换为角度,便于查看!
angle = Mathf.Asin (Vector3.Distance (Vector3.zero, Vector3.Cross (a.normalized, b.normalized))) * Mathf.Rad2Deg;
GUILayout.Label ("向量axb为:" + e);
GUILayout.Label ("向量bxa为:" + d);
GUILayout.Label ("向量a,b的夹角为:" + angle);
}
}
上面的示例中,我们定义了两个向量a和b。分别求出了他们的点积和叉积,并通过点积和叉积来反过来计算他们的夹角。
这里要说明的是:
通过叉积计算度数是通过公式|c|=|a||b|sin
2.用来判断一个向量在另一个向量的左侧还是右侧,通过叉乘后向量的方向判断向量的位置
float GetAngularSpeed()
{
// 求出夹角
float angle = Vector3.Angle(transform.forward, nav.desiredVelocity);
// 求弧度
float result = angle * Mathf.Deg2Rad;
// 期望速度在机器人左侧则弧度为负,否则为正
Vector3 normal = Vector3.Cross(transform.forward, nav.desiredVelocity);
if (normal.y < 0)
{
// 说明在左侧 (A 为Z方向时,B在A的逆时针180度内,此时点积小于0,方向向下,y值小于0 )
result *= -1;
}
//if (nav.desiredVelocity == Vector3.zero)
//{
// result = 0;
//}
return result;
}
6 . 向量求夹角------Vector3.Angle(a, b)
返回的角度是俩个向量中小于180度的角度,是不分左右的,没有负数
1.HTC中把touchPad分为N等分,可以扩展为N个功能键
// 如下,控制游玩区前后左右移动 x 形区域,实现控制
// Update is called once per frame
void Update () {
if (device.GetPress(SteamVR_Controller.ButtonMask.Touchpad))
{
Vector2 pos = device.GetAxis();
GameObject cameraRig = transform.parent.gameObject;
if (Vector2.Angle(Vector2.up, pos) < 45)
{
cameraRig.transform.Translate(Vector3.forward *Time.deltaTime);
}
else if(Vector2.Angle(Vector2.right, pos) < 45)
{
Debug.Log("右");
cameraRig.transform.Translate(Vector3.right *Time.deltaTime);
}
else if (Vector2.Angle(Vector2.left, pos) < 45)
{
Debug.Log("左");
cameraRig.transform.Translate(Vector3.left *Time.deltaTime);
}
else if(Vector2.Angle(Vector2.down, pos) < 45)
{
Debug.Log("下");
cameraRig.transform.Translate(Vector3.back *Time.deltaTime);
}
}
}
2.设置怪物视野
public float sightAngle = 110;
// 获取玩家
private Transform player;
// 能否看到玩家
public bool canSeePlayer = false;
bool CheckSight()
{
Vector3 dir = player.position - transform.position;
if (Vector3.Angle(transform.forward, dir) < sightAngle / 2)
{
Ray ray = new Ray(transform.position + Vector3.up * 1.7f, dir);
RaycastHit hit;
// 中间不能有障碍物
if (Physics.Raycast(ray, out hit))
{
if (hit.collider.tag == GameTag.player)
{
canSeePlayer = true;
return true;
}
}
}
return false;
}
7.向量投影 Vector3 project
a点乘b向量=a向量的模乘以b向量的模乘以cosa ,
b向量的模cosa 叫做 a向量在b向量方向上的投影,等同于点积一个单位化向量
Vector3 project = Vector3.Project(nav.desiredVelocity, transform.forward);
8.Vector3.Distance(a,b)
空间俩点间的距离
Vector3.Distance(a,b) 等同于(a-b).magnitude 。
点时,表示俩点距离,即俩个相对于原点的向量,求距离
-
var other : Transform; -
if (other) { -
var dist = Vector3.Distance(other.position, transform.position); -
print ("Distance to other: " + dist); -
}
bool CheckVoice()
{
// 获取e玩家的脚步声
if (player.GetComponent
{
// 定义一条导航路径
NavMeshPath path = new NavMeshPath();
// 判断在当前的导航烘焙下,敌人是否能到达脚步声的位置
if (nav.CalculatePath(player.position, path))
{
// 定义一个拐点数组,用来存放这条路径上所有拐点位置信息(不包含起点和终点)
Vector3[] corners = path.corners;
Vector3[] pathPoints = new Vector3[corners.Length + 2];
pathPoints[0] = transform.position;
pathPoints[pathPoints.Length - 1] = player.position;
for (int i = 0; i < corners.Length; i++)
{
pathPoints[i + 1] = corners[i];
}
// 此路径的总距离
float pathDistance = 0;
for (int i = 0; i < pathPoints.Length - 1; i++)
{
pathDistance += Vector3.Distance(pathPoints[i], pathPoints[i + 1]); // 空间俩点间的距离
}
// 若总距离小于触发器的半径,则代表听到了声音
if (pathDistance < GetComponent
{
return true;
}
}
}
return false;
}