opencv-03-图像处理
图像处理
图像阈值
ret, dst = cv2.threshold(src, thresh, maxval, type)
- src: 输入图,只能输入单通道图像,通常来说为灰度图
- dst: 输出图
- thresh: 阈值
- maxval: 当像素值超过了阈值(或者小于阈值,根据type来决定),所赋予的值
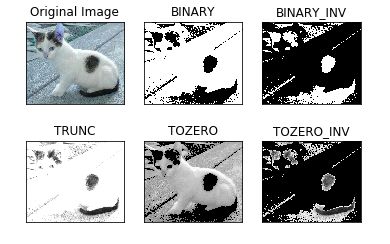
- type:二值化操作的类型,包含以下5种类型: cv2.THRESH_BINARY; cv2.THRESH_BINARY_INV; cv2.THRESH_TRUNC; cv2.THRESH_TOZERO;cv2.THRESH_TOZERO_INV
- cv2.THRESH_BINARY 超过阈值部分取maxval(最大值),否则取0
- cv2.THRESH_BINARY_INV THRESH_BINARY的反转
- cv2.THRESH_TRUNC 大于阈值部分设为阈值,否则不变
- cv2.THRESH_TOZERO 大于阈值部分不改变,否则设为0
- cv2.THRESH_TOZERO_INV THRESH_TOZERO的反转
ret, thresh1 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_BINARY)
ret, thresh2 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_BINARY_INV)
ret, thresh3 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_TRUNC)
ret, thresh4 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_TOZERO)
ret, thresh5 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_TOZERO_INV)
titles = ['Original Image', 'BINARY', 'BINARY_INV', 'TRUNC', 'TOZERO', 'TOZERO_INV']
images = [img, thresh1, thresh2, thresh3, thresh4, thresh5]
for i in range(6):
plt.subplot(2, 3, i + 1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]), plt.yticks([])
plt.show()
图像平滑
- 均值滤波
- 方框滤波
- 高斯滤波
- 中值滤波
img = cv2.imread('lenaNoise.png')
cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 均值滤波
# 简单的平均卷积操作
blur = cv2.blur(img, (3, 3))
cv2.imshow('blur', blur)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 方框滤波
# 基本和均值一样,可以选择归一化
box = cv2.boxFilter(img,-1,(3,3), normalize=True)
cv2.imshow('box', box)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 方框滤波
# 基本和均值一样,可以选择归一化,容易越界
box = cv2.boxFilter(img,-1,(3,3), normalize=False)
cv2.imshow('box', box)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 高斯滤波
# 高斯模糊的卷积核里的数值是满足高斯分布,相当于更重视中间的
aussian = cv2.GaussianBlur(img, (5, 5), 1)
cv2.imshow('aussian', aussian)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 中值滤波
# 相当于用中值代替
median = cv2.medianBlur(img, 5) # 中值滤波
cv2.imshow('median', median)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 展示所有的
res = np.hstack((blur,aussian,median))
#print (res)
cv2.imshow('median vs average', res)
cv2.waitKey(0)
cv2.destroyAllWindows()




腐蚀操作
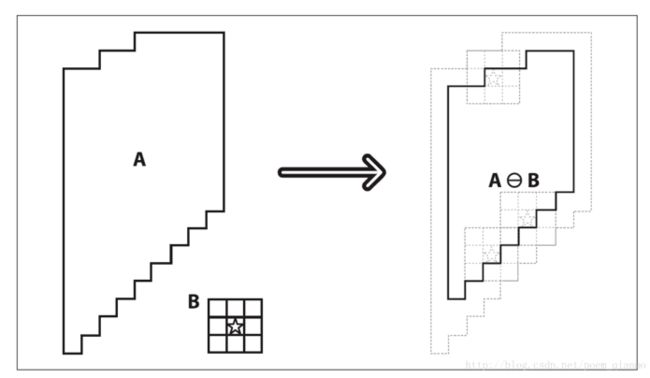
腐蚀原理:
腐蚀:局部最小值(与膨胀相反);
①定义一个卷积核B,核可以是任何的形状和大小,且拥有一个单独定义出来的参考点 - 锚点(anchorpoint);
通常和为带参考点的正方形或者圆盘,可将核称为模板或掩膜;
②将核乙与图像甲进行卷积,计算核乙覆盖区域的像素点最小值;
③将这个最小值赋值给参考点指定的像素;
因此,图像中的高亮区域逐渐减小。
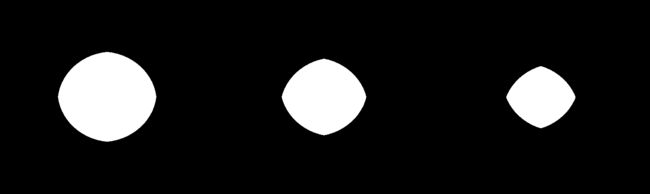
膨胀操作
膨胀就是求局部最大值的操作。
按数学方面来说,膨胀或者腐蚀操作就是将图像(或图像的一部分区域,我们称之为A)与核(我们称之为B)进行卷积。
核可以是任何的形状和大小,它拥有一个单独定义出来的参考点,我们称其为锚点(anchorpoint)。多数情况下,核是一个小的中间带有参考点和实心正方形或者圆盘,其实,我们可以把核视为模板或者掩码。
而膨胀就是求局部最大值的操作,核B与图形卷积,即计算核B覆盖的区域的像素点的最大值,并把这个最大值赋值给参考点指定的像素。这样就会使图像中的高亮区域逐渐增长。如下图所示,这就是膨胀操作的初衷。


开运算:
开运算(Open Operation):先腐蚀后膨胀的过程;
功能:
-
消除小物体;
-
在纤细处分离物体;
-
平滑较大的边界并不明显改变其面积;
闭运算:
闭运算(Closing Openration),先膨胀后腐蚀;
功能:
- 排除小型黑洞(黑斑);
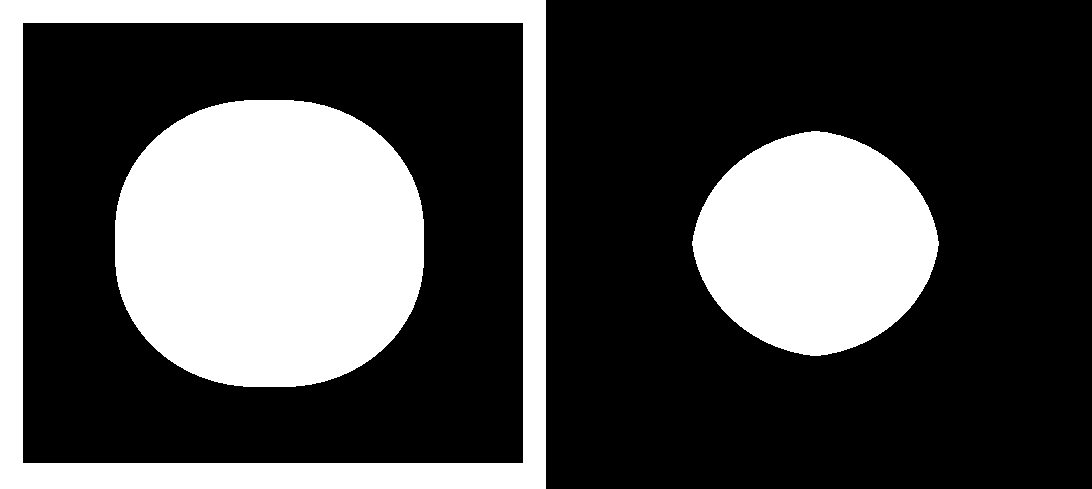
梯度运算
- 梯度=膨胀-腐蚀
# 梯度=膨胀-腐蚀
pie = cv2.imread('pie.png')
kernel = np.ones((7,7),np.uint8)
dilate = cv2.dilate(pie,kernel,iterations = 5)
erosion = cv2.erode(pie,kernel,iterations = 5)
res = np.hstack((dilate,erosion))
cv2.imshow('res', res)
cv2.waitKey(0)
cv2.destroyAllWindows()
gradient = cv2.morphologyEx(pie, cv2.MORPH_GRADIENT, kernel)
cv2.imshow('gradient', gradient)
cv2.waitKey(0)
cv2.destroyAllWindows()
礼帽与黑帽
- 礼帽 = 原始输入-开运算结果
- 黑帽 = 闭运算-原始输入
#礼帽
img = cv2.imread('dige.png')
tophat = cv2.morphologyEx(img, cv2.MORPH_TOPHAT, kernel)
cv2.imshow('tophat', tophat)
cv2.waitKey(0)
cv2.destroyAllWindows()
#黑帽
img = cv2.imread('dige.png')
blackhat = cv2.morphologyEx(img,cv2.MORPH_BLACKHAT, kernel)
cv2.imshow('blackhat ', blackhat )
cv2.waitKey(0)
cv2.destroyAllWindows()
图像梯度-算子
图像梯度-Sobel算子

img = cv2.imread('pie.png',cv2.IMREAD_GRAYSCALE)
cv2.imshow("img",img)
cv2.waitKey()
cv2.destroyAllWindows()
dst = cv2.Sobel(src, ddepth, dx, dy, ksize)
- ddepth:图像的深度
- dx和dy分别表示水平和竖直方向
- ksize是Sobel算子的大小
def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows()
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
cv_show(sobelx,'sobelx')
白到黑是正数,黑到白就是负数了,所有的负数会被截断成0,所以要取绝对值
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
sobelx = cv2.convertScaleAbs(sobelx)
cv_show(sobelx,'sobelx')
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)
sobely = cv2.convertScaleAbs(sobely)
cv_show(sobely,'sobely')
分别计算x和y,再求和
sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
cv_show(sobelxy,'sobelxy')
不建议直接计算
sobelxy=cv2.Sobel(img,cv2.CV_64F,1,1,ksize=3)
sobelxy = cv2.convertScaleAbs(sobelxy)
cv_show(sobelxy,'sobelxy')
img = cv2.imread('lena.jpg',cv2.IMREAD_GRAYSCALE)
cv_show(img,'img')
img = cv2.imread('lena.jpg',cv2.IMREAD_GRAYSCALE)
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
sobelx = cv2.convertScaleAbs(sobelx)
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)
sobely = cv2.convertScaleAbs(sobely)
sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
cv_show(sobelxy,'sobelxy')

图像梯度-Scharr算子

图像梯度-laplacian算子
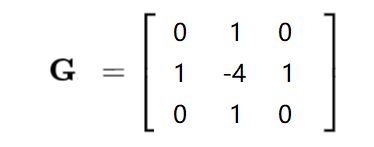
laplacian算子,对噪音点比较敏感,有个二阶导在里面
#不同算子的差异
img = cv2.imread('lena.jpg',cv2.IMREAD_GRAYSCALE)
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)
sobelx = cv2.convertScaleAbs(sobelx)
sobely = cv2.convertScaleAbs(sobely)
sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
scharrx = cv2.Scharr(img,cv2.CV_64F,1,0)
scharry = cv2.Scharr(img,cv2.CV_64F,0,1)
scharrx = cv2.convertScaleAbs(scharrx)
scharry = cv2.convertScaleAbs(scharry)
scharrxy = cv2.addWeighted(scharrx,0.5,scharry,0.5,0)
laplacian = cv2.Laplacian(img,cv2.CV_64F)
laplacian = cv2.convertScaleAbs(laplacian)
res = np.hstack((sobelxy,scharrxy,laplacian))
cv_show(res,'res')
img = cv2.imread('lena.jpg',cv2.IMREAD_GRAYSCALE)
cv_show(img,'img')

