移动机器人(一)——运动模型
一、简述
一般来说移动机器人的运动模型可分为完整约束和非完整约束。
- 完整约束(Holonomic,控制数=自由度):可以用一个由位形变量 x , y , θ x,y,\theta x,y,θ组成的方程来描述。包括全向轮模型。
- 非完整约束(Non-holonomic,控制数<自由度):只能用位形变量的微分方程描述,无法积分成一个位形变量的约束方程。包括双轮自行车模型和差速模型 。
通常地面机器人的自由度为3,包括x,y与朝向。对于角轮(castor wheels)或者是全向轮(Omni-wheels)的机器人,是holonomic的,因为它能够朝各个方向移动,机器人的总自由度与可控自由度是相等的。
汽车模型可控的自由度为2,包括油门/刹车和方向盘转角,差速模型可控自由度为2,包括X方向和朝向(差速转向)。使得它难以满足任何方向的行驶(除非车辆发生打滑或侧滑),所以是非完整性约束。
相关概念
- 广义坐标:广义坐标是用来描述系统位形所需要的独立参数,或者最少参数。当分析有的问题时(尤其是当有许多约束条件的时候),尽量选择独立的广义坐标。因为这样可以减少代表约束的变量。
- 位形空间(configuration space,C-space):所有位置形态集合。
- 任务空间(task space):所有可能的机器人位姿构成的集合。
二、单轮模型(unicycle model)
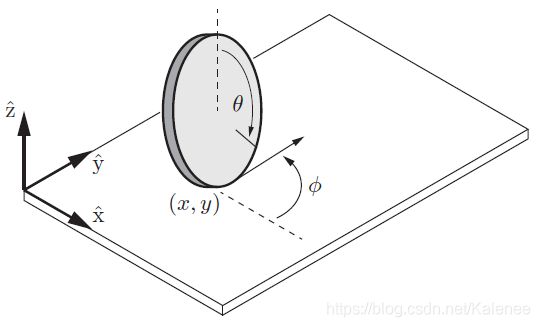
单轮模型的位形为 ( θ , x , y ) (\theta,x,y) (θ,x,y), r r r为车轮半径, ( x , y ) (x,y) (x,y)为车轮与地面接触点, ϕ \phi ϕ为前进方向,单轮的规范简化模型为
q ˙ = [ ϕ ˙ x ˙ y ˙ ] = [ 0 1 r cos ϕ 0 r sin ϕ 0 ] [ u 1 u 2 ] \dot{q} = \begin{bmatrix} \dot{\phi} \\ \dot{x} \\ \dot{y} \end{bmatrix}= \begin{bmatrix} 0 & 1 \\ r \cos \phi & 0\\ r \sin \phi & 0 \end{bmatrix} \begin{bmatrix} u_1 \\ u_2 \\ \end{bmatrix} q˙=⎣⎡ϕ˙x˙y˙⎦⎤=⎣⎡0rcosϕrsinϕ100⎦⎤[u1u2]
u = ( u 1 , u 2 ) u = (u_1,u_2) u=(u1,u2)为控制输入, u 1 u_1 u1为前后行驶时的转动速度, u 2 u_2 u2为前进方向得到转速,其控制变换为
u 1 = v r , u 2 = w ( ϕ ˙ ) u_1 = \frac{v}{r},\ u_2=w(\dot{\phi}) u1=rv, u2=w(ϕ˙)
三、差速模型(Differentially-drive)
3.1 两轮差速

两轮差速机器人由两个独立驱动的半径为 r r r轮子组成,围绕同一轴线旋转,并带有一个或多个脚轮、球形脚轮或使机器人保持水平的低摩擦滑块。
在实际应用中,车轮的组合可根据机器人对设计重心、转弯半径的要求,将辅助轮和驱动轮按照不同形式布置:
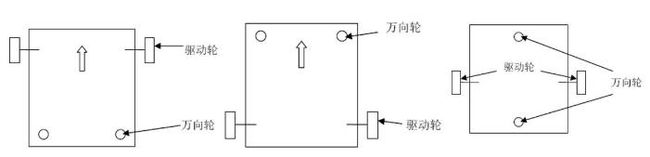
- 优点:结构及电机控制也相对简单,机器人灵活性较强,且算法易控制。
- 缺点:辅助轮(脚轮,万向轮)不适合在户外使用。
3.2 四轮差速
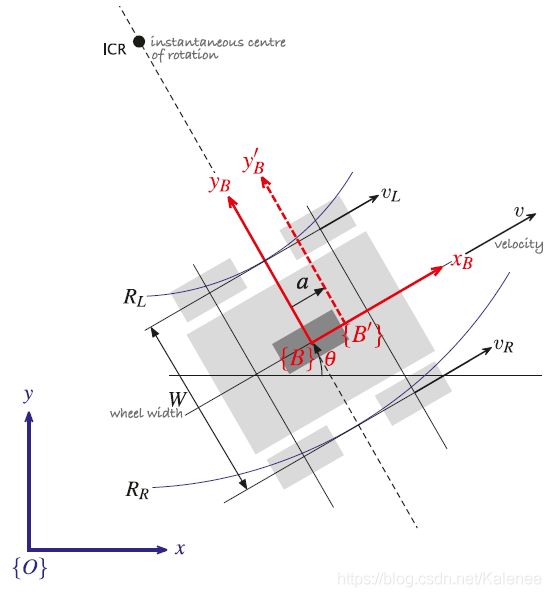
四轮差速车体为浅灰色外轮廓,可类似为深灰色的单轮模型,其运动学模型与两轮一样,因为同侧车轮转速相同。
四轮驱动在直线行走上能力较强,驱动力也比较大,但成本过高,电机控制较为复杂,为防止机器人打滑,需要更精细的结构设计。
小车车轮半径为 r r r,左右轮角速度为 u = ( u L , u R ) u = (u_L,u_R) u=(uL,uR),线速度为
v L = r ⋅ u l v R = r ⋅ u R v_L = r \cdot u_l\\ v_R = r \cdot u_R\\ vL=r⋅ulvR=r⋅uR
{ B } \{B\} {B}为小车的坐标系,其原点为小车的中心,X轴为小车前进方向,绕ICR旋转的角速度为:
θ ˙ = v L R L = v R R R \dot{\theta} = \frac{v_L}{R_L} = \frac{v_R}{R_R} θ˙=RLvL=RRvR
因为 R R = R L + W R_R = R_L +W RR=RL+W( W W W为左右两轮间距),因此 R L R_L RL为:
v L R L = v R R L + W v L ⋅ R L + v L ⋅ W = v R ⋅ R L R L = v L ⋅ W v R − v L \frac{v_L}{R_L} = \frac{v_R}{R_L+W}\\ v_L \cdot R_L+v_L \cdot W = v_R \cdot R_L\\ R_L = \frac{v_L \cdot W}{v_R-v_L} RLvL=RL+WvRvL⋅RL+vL⋅W=vR⋅RLRL=vR−vLvL⋅W
将 R L R_L RL带入方程可求得角速度(小车坐标系 { B } \{B\} {B}相对于世界坐标系 { O } \{O\} {O})为:
θ ˙ = v R − v L W \dot{\theta} = \frac{v_R-v_L}{W} θ˙=WvR−vL
小车的线速度为:
v = v R + v L 2 v = \frac{v_R+v_L}{2} v=2vR+vL
小车的运动方程为:
x ˙ = v cos θ y ˙ = v sin θ θ ˙ = v R − v L W \dot{x} = v \cos{\theta}\\ \dot{y} = v \sin{\theta}\\ \dot{\theta} = \frac{v_R-v_L}{W} x˙=vcosθy˙=vsinθθ˙=WvR−vL
规范简化模型为:
q ˙ = [ θ ˙ x ˙ y ˙ ] = [ − r w r w r 2 cos θ r 2 cos θ r 2 sin θ r 2 sin θ ] [ u L u R ] \dot{q}= \begin{bmatrix} \dot{\theta}\\ \dot{x}\\ \dot{y} \end{bmatrix}= \begin{bmatrix} -\frac{r}{w} & \frac{r}{w}\\ \frac{r}{2} \cos \theta & \frac{r}{2} \cos \theta\\ \frac{r}{2} \sin \theta & \frac{r}{2} \sin \theta\\ \end{bmatrix} \begin{bmatrix} u_L\\ u_R \end{bmatrix} q˙=⎣⎡θ˙x˙y˙⎦⎤=⎣⎡−wr2rcosθ2rsinθwr2rcosθ2rsinθ⎦⎤[uLuR]
差速模型可以原地旋转,但不代表其为完整约束,本质上小车只有X轴移动和旋转两个控制自由量。
设 w = θ ˙ , d = W 2 w = \dot{\theta},d = \frac{W}{2} w=θ˙,d=2W,小车的控制变换为:
u L = v − w d r , u R = v + w d r u_L= \frac{v-wd}{r},\ u_R= \frac{v+wd}{r} uL=rv−wd, uR=rv+wd
w d wd wd为旋转时在离旋转中心 d d d距离处产生的切向线速度, v − w d v-wd v−wd和 v + w d v+wd v+wd为切向加上角速度产生的线速度的影响后的实际速度,其正负与固定在小车上的坐标系有关。
3.3 旋转运动分析
运动状态
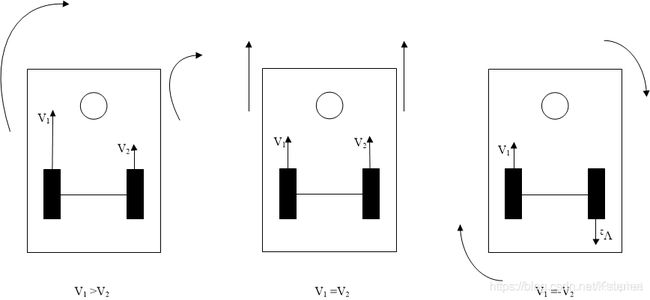
- 当 v l > v r ∣ ∣ v l < v r v_l > v_r || v_l < v_r vl>vr∣∣vl<vr时,机器做圆弧运动;
- 当 v l = v r v_l = v_r vl=vr时,机器做直线运动;
- 当 v l = − v r v_l =- v_r vl=−vr时,机器以左右轮中心点做原地旋转;
力分析
- 原地旋转
差速模型在转动时,作用在车子上的为一对等大,方向相反的力,称为力偶。
由两个等值、反向、不共线的(平行)力组成的力系称为力偶,记作 ( F ⃗ , F ⃗ , ) (\vec{F},\vec{F}^{,}) (F,F,)
- 力偶中两力所在平面称为力偶作用面
- 力偶两力之间的垂直距离称为力偶臂
力偶在小车上形成一个力偶矩
M = ± F ⋅ d M = \pm F \cdot d M=±F⋅d
力矩 = 转动惯量 x 角加速,力偶矩带动小车旋转。
- 圆弧运动
当作用小车两侧速度不一致时,在小车上产生一个力偶和沿小车前进方向的力,使其旋转的同时前进产生圆弧运动。
四、汽车模型(Car-Like Mobile)
该模型也称为双轮自行车模型,常被误称为阿克曼(Ackeman)模型,因为汽车的转向使用阿克曼转向几何。
使用阿克曼转向的汽车,在转向时,两个前轮的转向角不同,使得所有车轮做无滑动的纯滚动(即车轮前进方向垂直于车轮于ICR之间的连线)
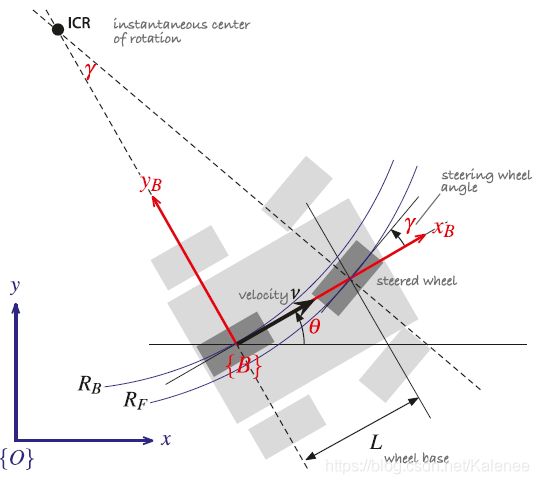
{ O } \{O\} {O}为世界坐标系。
{ B } \{B\} {B}为小车的坐标系,其原点为小车的后轮中心,X轴为小车前进方向,Y轴垂直于两轮中心线,在该坐标系下的小车速度为:
V x ˙ = v , V y ˙ = 0 ^{V}\dot{x} = v, ^{V}\dot{y} = 0 Vx˙=v,Vy˙=0
虚线的交点为旋转瞬心(ICR),小车上的参考点( { B } \{B\} {B}的原心)将绕该瞬心做圆弧运动, θ \theta θ为前进方向,其角速度为:
θ ˙ = v R B \dot{\theta} = \frac{v}{R_B} θ˙=RBv
转弯半径为:
R B = L tan γ R_B = \frac{L}{\tan{\gamma}} RB=tanγL
γ \gamma γ为前轮转向角度
小车的完整运动方程为
q ˙ = [ θ ˙ x ˙ y ˙ γ ˙ ] = [ tan γ L 0 cos θ 0 sin θ 0 0 1 ] [ v w ] \dot{q}= \begin{bmatrix} \dot{\theta}\\ \dot{x}\\ \dot{y}\\ \dot{\gamma} \end{bmatrix}= \begin{bmatrix} \frac{\tan \gamma}{L}&0\\ \cos \theta &0\\ \sin \theta&0\\ 0&1 \end{bmatrix} \begin{bmatrix} v\\ w\\ \end{bmatrix} q˙=⎣⎢⎢⎡θ˙x˙y˙γ˙⎦⎥⎥⎤=⎣⎢⎢⎡Ltanγcosθsinθ00001⎦⎥⎥⎤[vw]
若转向控制为转向角 γ \gamma γ而不是其速率 γ ˙ \dot{\gamma} γ˙,则可以简化运动方程,其规范简化模型为:
当转向速率 γ ˙ \dot{\gamma} γ˙足够高,使得转向角几乎为瞬时改变,则该假设合理,在这种情况下, γ ˙ \dot{\gamma} γ˙作为状态变量被消除,小车位形为 q = ( θ , x , y ) q=(\theta,x,y) q=(θ,x,y)
q ˙ = [ γ ˙ x ˙ y ˙ ] = [ 0 1 cos θ 0 sin θ 0 ] [ v w ] \dot{q}= \begin{bmatrix} \dot{\gamma}\\ \dot{x}\\ \dot{y} \end{bmatrix}= \begin{bmatrix} 0&1\\ \cos \theta & 0\\\ \sin \theta&0 \end{bmatrix} \begin{bmatrix} v\\ w\\ \end{bmatrix} q˙=⎣⎡γ˙x˙y˙⎦⎤=⎣⎡0cosθ sinθ100⎦⎤[vw]
在当前条件下,当控制输入为 ( v , w ) (v,w) (v,w)时, v v v为汽车前进速度, w w w为旋转速率,其控制变换为:
v = v γ = tan − 1 ( L w v ) v = v\\ \gamma = \tan^{-1}(\frac{Lw}{v}) v=vγ=tan−1(vLw)
在世界坐标系 { O } \{O\} {O}中,Y方向的速度约束为:
y ˙ cos θ − x ˙ sin θ ≡ 0 \dot{y} \cos{\theta} - \dot{x} \sin{\theta} \equiv 0 y˙cosθ−x˙sinθ≡0
≡ \equiv ≡为恒等号,参变量恒为一个常数或恒定表达式时,总等于关系与变量无关。例如函数 f ( x ) ≡ k f(x)\equiv k f(x)≡k表示该函数的值始终为k而与x的值无关。
根据不同情况,该模型存在不同的约束
-
simple car model
∣ v ∣ ⩽ v m a x , ∣ θ ∣ ⩽ θ m a x < π 2 |v| \leqslant v_{max}, |\theta| \leqslant \theta_{max} < \frac{\pi}{2} ∣v∣⩽vmax,∣θ∣⩽θmax<2π -
Reeds & Shepp’s car(前进、后退和停止)
v ∈ { − v m a x , v m a x } , ∣ θ ∣ ⩽ θ m a x < π 2 v \in \left \{-v_{max},v_{max}\right \}, |\theta| \leqslant \theta_{max} < \frac{\pi}{2} v∈{−vmax,vmax},∣θ∣⩽θmax<2π -
Dubin’s car(前进和停止)
v = v m a x , ∣ θ ∣ ⩽ θ m a x < π 2 v = v_{max}, |\theta| \leqslant \theta_{max} < \frac{\pi}{2} v=vmax,∣θ∣⩽θmax<2π
参考
《Robotics, Vision and Control: Fundamental Algorithms in MATLAB Second Edition》——4 Mobile Robot Vehicles
《现代机器人学:机构、规划与控制》——13 轮式移动机器人
Kinematics for Wheeled Systems
图解差速机器人的三种运动学模型
两轮差速移动机器人运动分析、建模和控制
无人驾驶汽车系统入门(五)——运动学自行车模型和动力学自行车模型