三维空间刚体运动的描述总结
三维空间刚体运动的描述方式有很多种,大概是:
旋转矩阵、平移向量--->欧式变换矩阵--->旋转向量--->欧拉角--->四元数
下面对它们简单的做一个整理,顺一下思路。
欧式变换中,坐标系的变换有:旋转、平移两种情况(只有旋转、只有平移、两者都有)
1、旋转矩阵、平移向量
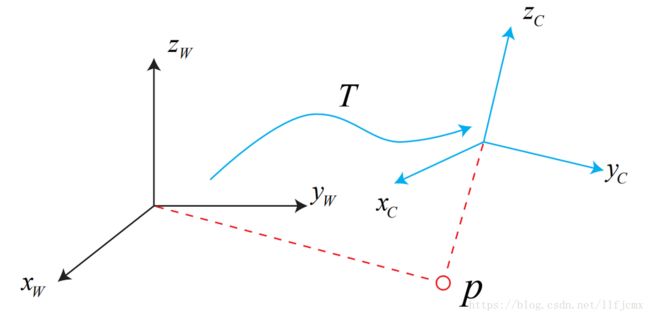
假设此时,相机坐标系相对于世界坐标系的旋转矩阵为R、平移向量为t,则![]()
这里要注意的就是“R、t是从哪个坐标系到哪个坐标系的,一定不能弄错了”,R是一个行列式为1的正交矩阵。
2、欧式变换矩阵
用R、t来表示欧式空间的旋转和平移存在一个问题:变换关系不是一个线性关系,多次变换之后计算公式会变得过于复杂。
于是就引入了齐次坐标:在三维向量的末尾添加一维(为数字1),将其变成四维向量,这种形式的坐标就是齐次坐标。
在齐次坐标里边,某个点 的具体坐标不是唯一确定的,比如说[1, 1, 1, 1]和[2, 2, 2, 2]表示的是同一个点。但是,如果最后一项不为0,我们可以将其转换为“归一化坐标”---所有坐标除以最后一项,也就是将齐次坐标转换为非齐次坐标,对于每一个点来说,它的归一化坐标一定是唯一的。用公式表示就是:
的具体坐标不是唯一确定的,比如说[1, 1, 1, 1]和[2, 2, 2, 2]表示的是同一个点。但是,如果最后一项不为0,我们可以将其转换为“归一化坐标”---所有坐标除以最后一项,也就是将齐次坐标转换为非齐次坐标,对于每一个点来说,它的归一化坐标一定是唯一的。用公式表示就是:![]() 。
。
引入了其次坐标之后,我们可以将R、t写在一个矩阵里面,如下:
![]()
中间的矩阵称为欧式变换矩阵,使用这种形式的欧式变换矩阵的好处就是它是一种线性变换的形式,多次变换直接将欧式变换矩阵左乘就可以得到最终的变换矩阵。
3、旋转向量
欧式变换可以很好的描述的刚体的运动,并且还是线性的形式。为了还需要旋转向量?
- 欧式变换矩阵用9个变量描述6个自由度的运动,信息有冗余
- 欧式变换矩阵本身是行列式为1的正交矩阵,这样的约束会使得后面优化的求解变得苦难。
旋转向量表示旋转的思想就是:任意一个旋转都可以用旋转轴和旋转角来表示。
因此,我们可以让旋转向量的方向和旋转轴相同,旋转向量的模表示旋转角。
旋转向量用3个自由度描述旋转,再用平移向量来描述平移向量,这样刚好可以用6个自由度来表达一次变换。
旋转向量和旋转矩阵之间的转换---罗德里格斯公式:
- 若旋转轴为
 ,旋转角为
,旋转角为 ,则旋转矩阵为:
,则旋转矩阵为:
- 若已经旋转矩阵,求旋转角:
![]()
![]()
于是:![]()
同时,旋转轴经过旋转之后不变,则有![]() ,解方程即可得到旋转轴。
,解方程即可得到旋转轴。
4、欧拉角
相比旋转欧式、欧式变换矩阵、旋转向量,欧拉角以一种更加直观的方式来表示旋转---三个轴上分离的转角。
欧拉角的一个缺点就是存在“万向锁问题”。
5、四元数
四元数的形式如下:![]() 或者
或者![]() ,其中
,其中![]()
单位四元数可以用来表示三维空间中任意一个旋转,这种表达方式和欧式变换矩阵、欧拉角是等价的。
(1)四元数和旋转向量之间的转换
假设某个旋转是绕单位向量![]() 进行了角度为,那么这个旋转对应的四元数为:
进行了角度为,那么这个旋转对应的四元数为:
![]()
相反,若已知一个单位四元数为![]() ,可以从它计算出旋转轴和夹角:
,可以从它计算出旋转轴和夹角:
![]() ,
,![]()
上面式子中的![]() 加上
加上![]() ,得到一个完全相同的旋转,但是对应的四元数却成为一个负的。在四元数中,任意一个旋转,都可以用两个互为相反数的四元数来表示。
,得到一个完全相同的旋转,但是对应的四元数却成为一个负的。在四元数中,任意一个旋转,都可以用两个互为相反数的四元数来表示。
(2)用四元数表示旋转
假设一个空间三维点 ,以及一个由轴角指定的旋转
,以及一个由轴角指定的旋转![]() ,经过旋转之后变为点
,经过旋转之后变为点 。
。
它们之间的关系可以用下列式子来表达:
- 把三维空间点用一个纯四元数来描述:
![p=[0,x,y,z]](http://img.e-com-net.com/image/info8/b0fd9db33ba64b8eabc885ff27c7ba91.gif)
- 把旋转用四元数表示:
![q=[cos\theta /2,\vec{n}sin\theta /2]](http://img.e-com-net.com/image/info8/33db2561c2fe42579281a8dade697144.gif)
- 旋转之后的点为:

可以验证,计算结果的实部为0,也就是一个纯四元数。虚部的3个分量表示旋转后的点的坐标。
(3)四元数到旋转矩阵的转换---见SLAM十四讲P55。
下面是一道练习题:
机器人1号、2号分别位于世界坐标系中。
1号的位姿:q1=[0.25,0.2,0.3,0.1],t1=[0.3,0.1,0.1]
2号的位姿:q2=[-0.5,0..4,-0.1,0.2],t2=[-0.1,0.5,0.3]
注意:这里的q、t表达的是Tcw,且未进行归一化。
设点p在机器人1号的坐标系下的坐标为p=[0.5,0,0.2],求它在机器人2号的坐标系下的坐标。
#include
#include
#include
//Geometry模块提供了各种旋转和平移的表示
#include
using namespace std;
int main()
{
//一号的姿态
Eigen::Quaterniond q1(0.35, 0.2, 0.3, 0.1);
Eigen::Vector3d t1(0.3, 0.1, 0.1);
Eigen::Isometry3d Tcw_1 = Eigen::Isometry3d::Identity();
Tcw_1.rotate(q1.normalized().matrix()); //q1.matrix()将四元数转为AngleAxis旋转向量
Tcw_1.pretranslate(t1);
//点P
Eigen::Vector3d Pc1(0.5, 0, 0.2);
Eigen::Vector3d Pw = Tcw_1.inverse()*Pc1;
//二号的姿态
Eigen::Quaterniond q2(-0.5, 0.4, -0.1, 0.2);
Eigen::Vector3d t2(-0.1, 0.5, 0.3);
Eigen::Isometry3d Tcw_2 = Eigen::Isometry3d::Identity();
Tcw_2.rotate(q2.normalized().matrix());
Tcw_2.pretranslate(t2);
Eigen::Vector3d Pc2 = Tcw_2*Pw;
cout << "p向量在小萝卜二号的坐标系下的坐标为:" << endl;
cout << "(" << Pc2.x() << "," << Pc2.y() << "," << Pc2.z() << ")" << endl;
return 0;
}