LOAM_velodyne 2.laserOdometry 激光里程计
目录
注解:
代码流程:
1、主函数: main
2.LaserOdometry类中的 setup 函数:
3、回调函数laserCloudSharpHandler
4、回调laserCloudLessSharpHandler
5、回调laserCloudFlatHandler
6、回调laserCloudLessFlatHandler
7、回调laserCloudFullResHandler
8、IMU回调imuTransHandler
9、process函数
三、核心函数 BasicLaserOdometry::process函数
总结:
注解:
功能:进行点云匹配,完成运动估计(帧间匹配)。
具体实现:利用ScanRegistration中提取到的特征点,建立相邻时间点云数据之间的关联,由此推断lidar的运动。
备注:绿色的函数指在下面解释,红色的函数指本文单独的函数解释
代码流程:
1、主函数: main
/** Main node entry point. */
int main(int argc, char **argv)
{
ros::init(argc, argv, "laserOdometry");
ros::NodeHandle node;
ros::NodeHandle privateNode("~");
loam::LaserOdometry laserOdom(0.1);
if (laserOdom.setup(node, privateNode)) {
// initialization successful
laserOdom.spin();
}
return 0;
}1.loam::LaserOdometry类的构造
声明 :
explicit LaserOdometry(float scanPeriod = 0.1, uint16_t ioRatio = 2, size_t maxIterations = 25);
参数解释:激光周期0.1, 输入帧与输出帧的比率2, 最大迭代次数25
定义: 初始化odom和odom_tf
LaserOdometry::LaserOdometry(float scanPeriod, uint16_t ioRatio, size_t maxIterations):
BasicLaserOdometry(scanPeriod, maxIterations),
_ioRatio(ioRatio)
{
// initialize odometry and odometry tf messages
_laserOdometryMsg.header.frame_id = "/camera_init";
_laserOdometryMsg.child_frame_id = "/laser_odom";
_laserOdometryTrans.frame_id_ = "/camera_init";
_laserOdometryTrans.child_frame_id_ = "/laser_odom";
}
BasicLaserOdometry类的定义
BasicLaserOdometry::BasicLaserOdometry(float scanPeriod, size_t maxIterations) :
_scanPeriod(scanPeriod),
_systemInited(false),
_frameCount(0),
_maxIterations(maxIterations),
_deltaTAbort(0.1),
_deltaRAbort(0.1),
_cornerPointsSharp(new pcl::PointCloud()),
_cornerPointsLessSharp(new pcl::PointCloud()),
_surfPointsFlat(new pcl::PointCloud()),
_surfPointsLessFlat(new pcl::PointCloud()),
_laserCloud(new pcl::PointCloud()),
_lastCornerCloud(new pcl::PointCloud()),
_lastSurfaceCloud(new pcl::PointCloud()),
_laserCloudOri(new pcl::PointCloud()),
_coeffSel(new pcl::PointCloud())
{} 2.LaserOdometry类中的 setup 函数:
读取参数:
scanPeriod:激光周期 0.1 , ioRatio:输入帧与输出帧的比率 0.1 , maxIterations:最大迭代次数 25 , deltaTAbort:的优化中止位置阈值 , deltaRAbort:优化中止角度阈值
发布话题:
_pubLaserCloudCornerLast = node.advertise("/laser_cloud_corner_last", 2);
_pubLaserCloudSurfLast = node.advertise("/laser_cloud_surf_last", 2);
_pubLaserCloudFullRes = node.advertise("/velodyne_cloud_3", 2);
_pubLaserOdometry = node.advertise("/laser_odom_to_init", 5); 接收话题:
_subCornerPointsSharp = node.subscribe
("/laser_cloud_sharp", 2, &LaserOdometry::laserCloudSharpHandler, this);
_subCornerPointsLessSharp = node.subscribe
("/laser_cloud_less_sharp", 2, &LaserOdometry::laserCloudLessSharpHandler, this);
_subSurfPointsFlat = node.subscribe
("/laser_cloud_flat", 2, &LaserOdometry::laserCloudFlatHandler, this);
_subSurfPointsLessFlat = node.subscribe
("/laser_cloud_less_flat", 2, &LaserOdometry::laserCloudLessFlatHandler, this);
_subLaserCloudFullRes = node.subscribe
("/velodyne_cloud_2", 2, &LaserOdometry::laserCloudFullResHandler, this);
_subImuTrans = node.subscribe
("/imu_trans", 5, &LaserOdometry::imuTransHandler, this); 3.LaserOdometry类中的 spin函数
ros::Rate rate(100);
bool status = ros::ok();
// loop until shutdown
while (status)
{
ros::spinOnce();
// try processing new data
process();
status = ros::ok();
rate.sleep();
}检测ros状态,同时执行process函数
3、回调函数laserCloudSharpHandler
1.将接收到的角点的时间记录
_timeCornerPointsSharp = cornerPointsSharpMsg->header.stamp;2.将原有角点清除,并把当前角点数据转化为pcl,pcl::removeNaNFromPointCloud(laserCloudIn, laserCloudIn, indices)
cornerPointsSharp()->clear();
pcl::fromROSMsg(*cornerPointsSharpMsg, *cornerPointsSharp());3.移除NAN点,并有新角点标记设为true
pcl::removeNaNFromPointCloud(*cornerPointsSharp(), *cornerPointsSharp(), indices);
_newCornerPointsSharp = true;4、回调laserCloudLessSharpHandler
与上面类似
_timeCornerPointsLessSharp = cornerPointsLessSharpMsg->header.stamp;
cornerPointsLessSharp()->clear();
pcl::fromROSMsg(*cornerPointsLessSharpMsg, *cornerPointsLessSharp());
std::vector indices;
pcl::removeNaNFromPointCloud(*cornerPointsLessSharp(), *cornerPointsLessSharp(), indices);
_newCornerPointsLessSharp = true; 5、回调laserCloudFlatHandler
与上面类似
_timeSurfPointsFlat = surfPointsFlatMsg->header.stamp;
surfPointsFlat()->clear();
pcl::fromROSMsg(*surfPointsFlatMsg, *surfPointsFlat());
std::vector indices;
pcl::removeNaNFromPointCloud(*surfPointsFlat(), *surfPointsFlat(), indices);
_newSurfPointsFlat = true; 6、回调laserCloudLessFlatHandler
与上面类似
_timeSurfPointsLessFlat = surfPointsLessFlatMsg->header.stamp;
surfPointsLessFlat()->clear();
pcl::fromROSMsg(*surfPointsLessFlatMsg, *surfPointsLessFlat());
std::vector indices;
pcl::removeNaNFromPointCloud(*surfPointsLessFlat(), *surfPointsLessFlat(), indices);
_newSurfPointsLessFlat = true; 7、回调laserCloudFullResHandler
与上面类似
_timeLaserCloudFullRes = laserCloudFullResMsg->header.stamp;
laserCloud()->clear();
pcl::fromROSMsg(*laserCloudFullResMsg, *laserCloud());
std::vector indices;
pcl::removeNaNFromPointCloud(*laserCloud(), *laserCloud(), indices);
_newLaserCloudFullRes = true; 8、IMU回调imuTransHandler
_timeImuTrans = imuTransMsg->header.stamp;
pcl::PointCloud imuTrans;
pcl::fromROSMsg(*imuTransMsg, imuTrans);
updateIMU(imuTrans);
_newImuTrans = true; 上述中updateIMU数据
assert(4 == imuTrans.size());
_imuPitchStart = imuTrans.points[0].x;
_imuYawStart = imuTrans.points[0].y;
_imuRollStart = imuTrans.points[0].z;
_imuPitchEnd = imuTrans.points[1].x;
_imuYawEnd = imuTrans.points[1].y;
_imuRollEnd = imuTrans.points[1].z;
_imuShiftFromStart = imuTrans.points[2];
_imuVeloFromStart = imuTrans.points[3];IMU数据发布时:
void BasicScanRegistration::updateIMUTransform()
{
_imuTrans[0].x = _imuStart.pitch.rad();
_imuTrans[0].y = _imuStart.yaw.rad();
_imuTrans[0].z = _imuStart.roll.rad();
_imuTrans[1].x = _imuCur.pitch.rad();
_imuTrans[1].y = _imuCur.yaw.rad();
_imuTrans[1].z = _imuCur.roll.rad();
Vector3 imuShiftFromStart = _imuPositionShift;
rotateYXZ(imuShiftFromStart, -_imuStart.yaw, -_imuStart.pitch, -_imuStart.roll);
_imuTrans[2].x = imuShiftFromStart.x();
_imuTrans[2].y = imuShiftFromStart.y();
_imuTrans[2].z = imuShiftFromStart.z();
Vector3 imuVelocityFromStart = _imuCur.velocity - _imuStart.velocity;
rotateYXZ(imuVelocityFromStart, -_imuStart.yaw, -_imuStart.pitch, -_imuStart.roll);
_imuTrans[3].x = imuVelocityFromStart.x();
_imuTrans[3].y = imuVelocityFromStart.y();
_imuTrans[3].z = imuVelocityFromStart.z();
}9、process函数
1.首先判断有没有新数据hasNewData(),如果没有新数据,该函数直接返回 return;
- 各个数据都已经更新,且 各个数据都由一帧激光数据生成
return _newCornerPointsSharp && _newCornerPointsLessSharp && _newSurfPointsFlat &&
_newSurfPointsLessFlat && _newLaserCloudFullRes && _newImuTrans &&
fabs((_timeCornerPointsSharp - _timeSurfPointsLessFlat).toSec()) < 0.005 &&
fabs((_timeCornerPointsLessSharp - _timeSurfPointsLessFlat).toSec()) < 0.005 &&
fabs((_timeSurfPointsFlat - _timeSurfPointsLessFlat).toSec()) < 0.005 &&
fabs((_timeLaserCloudFullRes - _timeSurfPointsLessFlat).toSec()) < 0.005 &&
fabs((_timeImuTrans - _timeSurfPointsLessFlat).toSec()) < 0.005;2.重置标志位reset()
_newCornerPointsSharp = false;
_newCornerPointsLessSharp = false;
_newSurfPointsFlat = false;
_newSurfPointsLessFlat = false;
_newLaserCloudFullRes = false;
_newImuTrans = false;3.求取帧间匹配的位姿 process 函数
BasicLaserOdometry::process();4.发布结果 publishResult();
1)transformSum有里程计总的转化,包括平移和旋转,首先将旋转转化成4元素
geometry_msgs::Quaternion geoQuat = tf::createQuaternionMsgFromRollPitchYaw(transformSum().rot_z.rad(),
-transformSum().rot_x.rad(),
-transformSum().rot_y.rad());2)从话题和tf中将该数据发布出去
_laserOdometryMsg.header.stamp = _timeSurfPointsLessFlat;
_laserOdometryMsg.pose.pose.orientation.x = -geoQuat.y;
_laserOdometryMsg.pose.pose.orientation.y = -geoQuat.z;
_laserOdometryMsg.pose.pose.orientation.z = geoQuat.x;
_laserOdometryMsg.pose.pose.orientation.w = geoQuat.w;
_laserOdometryMsg.pose.pose.position.x = transformSum().pos.x();
_laserOdometryMsg.pose.pose.position.y = transformSum().pos.y();
_laserOdometryMsg.pose.pose.position.z = transformSum().pos.z();
_pubLaserOdometry.publish(_laserOdometryMsg);
_laserOdometryTrans.stamp_ = _timeSurfPointsLessFlat;
_laserOdometryTrans.setRotation(tf::Quaternion(-geoQuat.y, -geoQuat.z, geoQuat.x, geoQuat.w));
_laserOdometryTrans.setOrigin(tf::Vector3(transformSum().pos.x(), transformSum().pos.y(), transformSum().pos.z()));
_tfBroadcaster.sendTransform(_laserOdometryTrans);3)按照设定比率发布数据
if (_ioRatio < 2 || frameCount() % _ioRatio == 1)
{
ros::Time sweepTime = _timeSurfPointsLessFlat;
publishCloudMsg(_pubLaserCloudCornerLast, *lastCornerCloud(), sweepTime, "/camera");
publishCloudMsg(_pubLaserCloudSurfLast, *lastSurfaceCloud(), sweepTime, "/camera");
transformToEnd(laserCloud()); // transform full resolution cloud to sweep end before sending it
publishCloudMsg(_pubLaserCloudFullRes, *laserCloud(), sweepTime, "/camera");
}三、核心函数 BasicLaserOdometry::process函数
分为三步:初始化,点云处理,坐标转化
1.检测系统是否初始化,如果未初始化时,进行初始化
- 激光的匹配涉及到两组数据,因此初始化相当于首先获取将一组数据。
- 初始化中,角特征 + 平面特征 构建了lastKDTree
if (!_systemInited)
{
_cornerPointsLessSharp.swap(_lastCornerCloud);
_surfPointsLessFlat.swap(_lastSurfaceCloud);
_lastCornerKDTree.setInputCloud(_lastCornerCloud);
_lastSurfaceKDTree.setInputCloud(_lastSurfaceCloud);
_transformSum.rot_x += _imuPitchStart;
_transformSum.rot_z += _imuRollStart;
_systemInited = true;
return;
}2.在点云足够多的条件下,开始正常工作。这里我们设定整个L-M运动估计的迭代次数为25次,以保证运算效率。迭代部分又可分为:对特征边/面上的点进行处理,构建Jaccobian矩阵,L-M运动估计求解。
- 首先得保证这些特征点足够多,否则没有任何特征的点没办法进行匹配, 角特征>10,面特征>100
pcl::PointXYZI coeff;
bool isDegenerate = false;
Eigen::Matrix matP;
_frameCount++;
_transform.pos -= _imuVeloFromStart * _scanPeriod;
size_t lastCornerCloudSize = _lastCornerCloud->points.size();
size_t lastSurfaceCloudSize = _lastSurfaceCloud->points.size();
if (lastCornerCloudSize > 10 && lastSurfaceCloudSize > 100)
{
std::vector pointSearchInd(1);
std::vector pointSearchSqDis(1);
std::vector indices;
pcl::removeNaNFromPointCloud(*_cornerPointsSharp, *_cornerPointsSharp, indices);
size_t cornerPointsSharpNum = _cornerPointsSharp->points.size();
size_t surfPointsFlatNum = _surfPointsFlat->points.size();
_pointSearchCornerInd1.resize(cornerPointsSharpNum);
_pointSearchCornerInd2.resize(cornerPointsSharpNum);
_pointSearchSurfInd1.resize(surfPointsFlatNum);
_pointSearchSurfInd2.resize(surfPointsFlatNum);
_pointSearchSurfInd3.resize(surfPointsFlatNum);
for (size_t iterCount = 0; iterCount < _maxIterations; iterCount++)
{
pcl::PointXYZI pointSel, pointProj, tripod1, tripod2, tripod3;
_laserCloudOri->clear();
_coeffSel->clear();
/***** 1. 特征边上的点配准并构建Jaccobian *****/
/***** 2. 特征面上的点配准并构建Jaccobian *****/
/***** 3. L-M运动估计求解 *****/
}
} - L-M方法其实就是非线性最小二乘,是Gauss-Newton优化的一种改进(增加了一个阻尼因子,代码中的s),所以关键在于如何把点云配准和运动估计的问题转换为L-M优化求解的问题。主要思路就是:构建约束方程 -> 约束方程求偏导构建Jaccobian矩阵 -> L-M求解。
- 下面再一步一步来看:关于构建约束方程的问题就是这节标题中提到的点云配准的问题,其基本思想就是从上一帧点云中找到一些边/面特征点,在当前帧点云中同样找这么一些点,建立他们之间的约束关系。
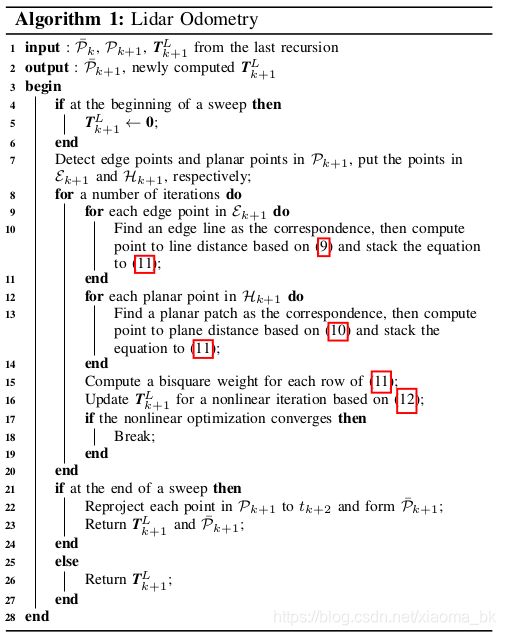
- 找t+1时刻的某个特征边/面上的点在t时刻下对应的配准点,论文作者给出如上图的思路。特征线:利用KD树找点i在t时刻点云中最近的一点j,并在j周围(上下几条线的范围内)找次近点l,于是我们把(j,l)称为点i在t时刻点云中的对应。特征面:与特征线类似,先找最近点j,在j周围找l,在j周围找m,将(j,l,m)称为点i在t时刻点云中的对应。代码实现如下:
3.特征线上的点配准:
1)将点坐标转换到起始点云坐标系中 pointSel为当前激光的角点
for (int i = 0; i < cornerPointsSharpNum; i++)
{
transformToStart(_cornerPointsSharp->points[i], pointSel);transformToStart 函数的定义为:
void BasicLaserOdometry::transformToStart(const pcl::PointXYZI& pi, pcl::PointXYZI& po)
{
float s = (1.f / _scanPeriod) * (pi.intensity - int(pi.intensity));
po.x = pi.x - s * _transform.pos.x();
po.y = pi.y - s * _transform.pos.y();
po.z = pi.z - s * _transform.pos.z();
po.intensity = pi.intensity;
Angle rx = -s * _transform.rot_x.rad();
Angle ry = -s * _transform.rot_y.rad();
Angle rz = -s * _transform.rot_z.rad();
rotateZXY(po, rz, rx, ry);
}2)每迭代五次,搜索一次最近点和次临近点(降采样)
(计算量的一种平衡吧,每次更新transform后都更新一次最近匹配计算资源消耗大)
if (iterCount % 5 == 0){下面代码}3)找到pointSel(当前时刻边特征中的某一点)在laserCloudCornerLast中的1个最邻近点
pointSearchInd(对应点的索引) , pointSearchSqDis:(pointSel与对应点的欧氏距离)
pcl::removeNaNFromPointCloud(*_lastCornerCloud, *_lastCornerCloud, indices);
_lastCornerKDTree.nearestKSearch(pointSel, 1, pointSearchInd, pointSearchSqDis);template inline
int KdTreeFLANN::nearestKSearch(const PointT &point, int num_closest,
std::vector &k_indices,
std::vector &k_sqr_distances) const
{
k_indices.resize(num_closest);
k_sqr_distances.resize(num_closest);
nanoflann::KNNResultSet resultSet(num_closest);
resultSet.init( k_indices.data(), k_sqr_distances.data());
_kdtree.findNeighbors(resultSet, point.data, nanoflann::SearchParams() );
return resultSet.size();
} 4)如果最临近的点距离小于25时,计算出 搜索到的点 所在线数 (closestPointScan 上一时刻最近点所在的线数)
if (pointSearchSqDis[0] < 25)
{
closestPointInd = pointSearchInd[0];
int closestPointScan = int(_lastSurfaceCloud->points[closestPointInd].intensity);5)从找得到的最邻近点开始,向上遍历3条线特征,找到最近距离以及最近标记 minPointSqDis2 + minPointSqDis2
- 找到与最邻近点相距3条线的特征点时跳出
for (int j = closestPointInd + 1; j < cornerPointsSharpNum; j++)
{
if (int(_lastCornerCloud->points[j].intensity) > closestPointScan + 2.5)
{
break;
}
pointSqDis = calcSquaredDiff(_lastCornerCloud->points[j], pointSel);
if (int(_lastCornerCloud->points[j].intensity) > closestPointScan)
{
if (pointSqDis < minPointSqDis2)
{
minPointSqDis2 = pointSqDis;
minPointInd2 = j;
}
}
}6)向下三条线,找最近点和次临近点
for (int j = closestPointInd - 1; j >= 0; j--)
{
if (int(_lastCornerCloud->points[j].intensity) < closestPointScan - 2.5)
{
break;
}
pointSqDis = calcSquaredDiff(_lastCornerCloud->points[j], pointSel);
if (int(_lastCornerCloud->points[j].intensity) < closestPointScan)
{
if (pointSqDis < minPointSqDis2)
{
minPointSqDis2 = pointSqDis;
minPointInd2 = j;
}
}
}7)获得了临近点和次临近点。 5 + 6 得到了次临近点
当前所有边特征点在上一时刻边特征点云中对应的最邻近点的索引
_pointSearchCornerInd1[i] = closestPointInd;当前所有边特征点在上一时刻边特征点云中对应的次邻近点的索引
_pointSearchCornerInd2[i] = minPointInd2;4.特征线的构建Jaccobian矩阵
1)当前点云坐标pointSel,上一时刻临近点坐标tripod1,上一时刻次次临近点坐标tripod2
if (pointSearchCornerInd2[i] >= 0) {
tripod1 = laserCloudCornerLast->points[pointSearchCornerInd1[i]];
tripod2 = laserCloudCornerLast->points[pointSearchCornerInd2[i]];
float x0 = pointSel.x;
float y0 = pointSel.y;
float z0 = pointSel.z;
float x1 = tripod1.x;
float y1 = tripod1.y;
float z1 = tripod1.z;
float x2 = tripod2.x;
float y2 = tripod2.y;
float z2 = tripod2.z;2)点到直线的距离 中
中::
,实际就乘上一个两向量夹角的正弦值 分别作差并叉乘后的向量模长
float a012 = sqrt(((x0 - x1)*(y0 - y2) - (x0 - x2)*(y0 - y1))
* ((x0 - x1)*(y0 - y2) - (x0 - x2)*(y0 - y1))
+ ((x0 - x1)*(z0 - z2) - (x0 - x2)*(z0 - z1))
* ((x0 - x1)*(z0 - z2) - (x0 - x2)*(z0 - z1))
+ ((y0 - y1)*(z0 - z2) - (y0 - y2)*(z0 - z1))
* ((y0 - y1)*(z0 - z2) - (y0 - y2)*(z0 - z1)));3)求两点之间的模长![]()
float l12 = sqrt((x1 - x2)*(x1 - x2) + (y1 - y2)*(y1 - y2) + (z1 - z2)*(z1 - z2));
3)向量[la;lb;lc] 为距离l 022分别对x0 y0 z0的偏导 transform的偏导
float la = ((y1 - y2)*((x0 - x1)*(y0 - y2) - (x0 - x2)*(y0 - y1))
+ (z1 - z2)*((x0 - x1)*(z0 - z2) - (x0 - x2)*(z0 - z1))) / a012 / l12;
float lb = -((x1 - x2)*((x0 - x1)*(y0 - y2) - (x0 - x2)*(y0 - y1))
- (z1 - z2)*((y0 - y1)*(z0 - z2) - (y0 - y2)*(z0 - z1))) / a012 / l12;
float lc = -((x1 - x2)*((x0 - x1)*(z0 - z2) - (x0 - x2)*(z0 - z1))
+ (y1 - y2)*((y0 - y1)*(z0 - z2) - (y0 - y2)*(z0 - z1))) / a012 / l12;4)计算点到直线的距离,以及偏差
float ld2 = a012 / l12; // Eq. (2)
// TODO: Why writing to a variable that's never read?
pointProj = pointSel;
pointProj.x -= la * ld2;
pointProj.y -= lb * ld2;
pointProj.z -= lc * ld2;5)定义阻尼因子,点到直线距离越小阻尼因子越大 ,计算出偏差 (xyz强度)
float s = 1;
if (iterCount >= 5)
{
s = 1 - 1.8f * fabs(ld2);
}
coeff.x = s * la;
coeff.y = s * lb;
coeff.z = s * lc;
coeff.intensity = s * ld2;6)满足阈值(ld2 < 0.5),将特征点插入
if (s > 0.1 && ld2 != 0) {
laserCloudOri->push_back(cornerPointsSharp->points[i]);
coeffSel->push_back(coeff);
}5.特征面上点配准
1)遍历平面特征点,pointSel(当前时刻边特征中的某一点)
for (int i = 0; i < surfPointsFlatNum; i++)
{
transformToStart(_surfPointsFlat->points[i], pointSel);
if (iterCount % 5 == 0)
{2)每迭代五次,搜索一次最近点和次临近点(降采样)
if (iterCount % 5 == 0)
{3)找到pointSel(当前时刻边特征中的某一点)在laserCloudCornerLast中的1个最邻近点
pointSearchInd(对应点的索引) , pointSearchSqDis:(pointSel与对应点的欧氏距离)
_lastSurfaceKDTree.nearestKSearch(pointSel, 1, pointSearchInd, pointSearchSqDis);
int closestPointInd = -1, minPointInd2 = -1, minPointInd3 = -1;4)如果最临近的点距离小于25时,计算出 搜索到的点 所在线数 (closestPointScan 上一时刻最近点所在的线数)
if (pointSearchSqDis[0] < 25)
{
closestPointInd = pointSearchInd[0];
int closestPointScan = int(_lastSurfaceCloud->points[closestPointInd].intensity);5)从找得到的最邻近点开始,遍历所有边特征点,找到与最邻近点相距3条线的特征点时跳出
for (int j = closestPointInd + 1; j < surfPointsFlatNum; j++)
{
if (int(_lastSurfaceCloud->points[j].intensity) > closestPointScan + 2.5)
{
break;
}
pointSqDis = calcSquaredDiff(_lastSurfaceCloud->points[j], pointSel);
if (int(_lastSurfaceCloud->points[j].intensity) <= closestPointScan)
{
if (pointSqDis < minPointSqDis2)
{
minPointSqDis2 = pointSqDis;
minPointInd2 = j;
}
}
else
{
if (pointSqDis < minPointSqDis3)
{
minPointSqDis3 = pointSqDis;
minPointInd3 = j;
}
}
}6)向下三条线
for (int j = closestPointInd - 1; j >= 0; j--)
{
if (int(_lastSurfaceCloud->points[j].intensity) < closestPointScan - 2.5)
{
break;
}
pointSqDis = calcSquaredDiff(_lastSurfaceCloud->points[j], pointSel);
if (int(_lastSurfaceCloud->points[j].intensity) >= closestPointScan)
{
if (pointSqDis < minPointSqDis2)
{
minPointSqDis2 = pointSqDis;
minPointInd2 = j;
}
}
else
{
if (pointSqDis < minPointSqDis3)
{
minPointSqDis3 = pointSqDis;
minPointInd3 = j;
}
}
}7)确定目标点
_pointSearchSurfInd1[i] = closestPointInd;
_pointSearchSurfInd2[i] = minPointInd2;
_pointSearchSurfInd3[i] = minPointInd3;6.特征面的构建Jaccobian矩阵 点到面的过程

if (_pointSearchSurfInd2[i] >= 0 && _pointSearchSurfInd3[i] >= 0)
{
tripod1 = _lastSurfaceCloud->points[_pointSearchSurfInd1[i]];
tripod2 = _lastSurfaceCloud->points[_pointSearchSurfInd2[i]];
tripod3 = _lastSurfaceCloud->points[_pointSearchSurfInd3[i]];
float pa = (tripod2.y - tripod1.y) * (tripod3.z - tripod1.z)
- (tripod3.y - tripod1.y) * (tripod2.z - tripod1.z);
float pb = (tripod2.z - tripod1.z) * (tripod3.x - tripod1.x)
- (tripod3.z - tripod1.z) * (tripod2.x - tripod1.x);
float pc = (tripod2.x - tripod1.x) * (tripod3.y - tripod1.y)
- (tripod3.x - tripod1.x) * (tripod2.y - tripod1.y);
float pd = -(pa * tripod1.x + pb * tripod1.y + pc * tripod1.z);
float ps = sqrt(pa * pa + pb * pb + pc * pc);
pa /= ps;
pb /= ps;
pc /= ps;
pd /= ps;
float pd2 = pa * pointSel.x + pb * pointSel.y + pc * pointSel.z + pd; //Eq. (3)??
// TODO: Why writing to a variable that's never read? Maybe it should be used afterwards?
pointProj = pointSel;
pointProj.x -= pa * pd2;
pointProj.y -= pb * pd2;
pointProj.z -= pc * pd2;
float s = 1;
if (iterCount >= 5)
{
s = 1 - 1.8f * fabs(pd2) / sqrt(calcPointDistance(pointSel));
}
coeff.x = s * pa;
coeff.y = s * pb;
coeff.z = s * pc;
coeff.intensity = s * pd2;
if (s > 0.1 && pd2 != 0)
{
_laserCloudOri->push_back(_surfPointsFlat->points[i]);
_coeffSel->push_back(coeff);
}
}
}至此Jaccobian矩阵就构建完毕了。每个已经匹配的特征_laserCloudOri ;特征点对应的Jaccobian矩阵的三个元素都保存在coeffSel中,后面采用L-M方法解算的时候直接调用就行了。
7.L-M运动估计求解
假设:雷达的运动是连续的。将所有对应到的点求到直线的距离到面的距离之和最短然后按照Levenberg-Marquardt算法迭代计算,得到两帧之间的变换,最后通过累计计算odom。
公式(1,2,3)特征提取与计算误差
我们认为Lidar匀速运动,因此公式(4)实现了Lidar变换矩阵的内插,得到其扫描点i时刻的位姿
公式(5)就是经典的刚体的旋转平移变换。
公式(6)为罗德里格斯公式,将旋转矩阵用旋转矢量表示,这种方法的最大优势在于节约计算所消耗的资源。
公式(7)-(8)分别为旋转矢量公式中的参数计算。搞清楚这些以后,就开始L-M的计算了;
1)匹配到的点的个数(即存在多少个约束)
int pointSelNum = _laserCloudOri->points.size();
if (pointSelNum < 10)
{
continue;
}
Eigen::Matrix matA(pointSelNum, 6);
Eigen::Matrix matAt(6, pointSelNum);
Eigen::Matrix matAtA;
Eigen::VectorXf matB(pointSelNum);
Eigen::Matrix matAtB;
Eigen::Matrix matX; 2)遍历每个对应点,并且构建Jaccobian矩阵
for (int i = 0; i < pointSelNum; i++) {
3)采用Levenberg-Marquardt计算 ,首先建立当前时刻Lidar坐标系下提取到的特征点与点到直线/平面的约束方程。而后对约束方程求对坐标变换(3旋转+3平移)的偏导。公式参见论文(2)-(8)
pointOri 当前时刻点坐标,coeff 该点所对应的偏导数
const pcl::PointXYZI& pointOri = _laserCloudOri->points[i];
coeff = _coeffSel->points[i];
4)具体构建某一点的矩阵分许: arx ary arz 偏导数
float s = 1;
float srx = sin(s * _transform.rot_x.rad());
float crx = cos(s * _transform.rot_x.rad());
float sry = sin(s * _transform.rot_y.rad());
float cry = cos(s * _transform.rot_y.rad());
float srz = sin(s * _transform.rot_z.rad());
float crz = cos(s * _transform.rot_z.rad());
float tx = s * _transform.pos.x();
float ty = s * _transform.pos.y();
float tz = s * _transform.pos.z();
float arx = (-s * crx*sry*srz*pointOri.x + s * crx*crz*sry*pointOri.y + s * srx*sry*pointOri.z
+ s * tx*crx*sry*srz - s * ty*crx*crz*sry - s * tz*srx*sry) * coeff.x
+ (s*srx*srz*pointOri.x - s * crz*srx*pointOri.y + s * crx*pointOri.z
+ s * ty*crz*srx - s * tz*crx - s * tx*srx*srz) * coeff.y
+ (s*crx*cry*srz*pointOri.x - s * crx*cry*crz*pointOri.y - s * cry*srx*pointOri.z
+ s * tz*cry*srx + s * ty*crx*cry*crz - s * tx*crx*cry*srz) * coeff.z;
float ary = ((-s * crz*sry - s * cry*srx*srz)*pointOri.x
+ (s*cry*crz*srx - s * sry*srz)*pointOri.y - s * crx*cry*pointOri.z
+ tx * (s*crz*sry + s * cry*srx*srz) + ty * (s*sry*srz - s * cry*crz*srx)
+ s * tz*crx*cry) * coeff.x
+ ((s*cry*crz - s * srx*sry*srz)*pointOri.x
+ (s*cry*srz + s * crz*srx*sry)*pointOri.y - s * crx*sry*pointOri.z
+ s * tz*crx*sry - ty * (s*cry*srz + s * crz*srx*sry)
- tx * (s*cry*crz - s * srx*sry*srz)) * coeff.z;
float arz = ((-s * cry*srz - s * crz*srx*sry)*pointOri.x + (s*cry*crz - s * srx*sry*srz)*pointOri.y
+ tx * (s*cry*srz + s * crz*srx*sry) - ty * (s*cry*crz - s * srx*sry*srz)) * coeff.x
+ (-s * crx*crz*pointOri.x - s * crx*srz*pointOri.y
+ s * ty*crx*srz + s * tx*crx*crz) * coeff.y
+ ((s*cry*crz*srx - s * sry*srz)*pointOri.x + (s*crz*sry + s * cry*srx*srz)*pointOri.y
+ tx * (s*sry*srz - s * cry*crz*srx) - ty * (s*crz*sry + s * cry*srx*srz)) * coeff.z;
float atx = -s * (cry*crz - srx * sry*srz) * coeff.x + s * crx*srz * coeff.y
- s * (crz*sry + cry * srx*srz) * coeff.z;
float aty = -s * (cry*srz + crz * srx*sry) * coeff.x - s * crx*crz * coeff.y
- s * (sry*srz - cry * crz*srx) * coeff.z;
float atz = s * crx*sry * coeff.x - s * srx * coeff.y - s * crx*cry * coeff.z;
float d2 = coeff.intensity;
matA(i, 0) = arx;
matA(i, 1) = ary;
matA(i, 2) = arz;
matA(i, 3) = atx;
matA(i, 4) = aty;
matA(i, 5) = atz;
matB(i, 0) = -0.05 * d2;5)最小二乘计算(QR分解法)
matAt = matA.transpose();
matAtA = matAt * matA;
matAtB = matAt * matB;
matX = matAtA.colPivHouseholderQr().solve(matAtB);
if (iterCount == 0)
{
Eigen::Matrix matE;
Eigen::Matrix matV;
Eigen::Matrix matV2;
Eigen::SelfAdjointEigenSolver< Eigen::Matrix > esolver(matAtA);
matE = esolver.eigenvalues().real();
matV = esolver.eigenvectors().real();
matV2 = matV;
isDegenerate = false;
float eignThre[6] = { 10, 10, 10, 10, 10, 10 };
for (int i = 0; i < 6; i++)
{
if (matE(0, i) < eignThre[i])
{
for (int j = 0; j < 6; j++)
{
matV2(i, j) = 0;
}
isDegenerate = true;
}
else
{
break;
}
}
matP = matV.inverse() * matV2;
}
if (isDegenerate)
{
Eigen::Matrix matX2(matX);
matX = matP * matX2;
}
_transform.rot_x = _transform.rot_x.rad() + matX(0, 0);
_transform.rot_y = _transform.rot_y.rad() + matX(1, 0);
_transform.rot_z = _transform.rot_z.rad() + matX(2, 0);
_transform.pos.x() += matX(3, 0);
_transform.pos.y() += matX(4, 0);
_transform.pos.z() += matX(5, 0);
if (!pcl_isfinite(_transform.rot_x.rad())) _transform.rot_x = Angle();
if (!pcl_isfinite(_transform.rot_y.rad())) _transform.rot_y = Angle();
if (!pcl_isfinite(_transform.rot_z.rad())) _transform.rot_z = Angle();
if (!pcl_isfinite(_transform.pos.x())) _transform.pos.x() = 0.0;
if (!pcl_isfinite(_transform.pos.y())) _transform.pos.y() = 0.0;
if (!pcl_isfinite(_transform.pos.z())) _transform.pos.z() = 0.0;
float deltaR = sqrt(pow(rad2deg(matX(0, 0)), 2) +
pow(rad2deg(matX(1, 0)), 2) +
pow(rad2deg(matX(2, 0)), 2));
float deltaT = sqrt(pow(matX(3, 0) * 100, 2) +
pow(matX(4, 0) * 100, 2) +
pow(matX(5, 0) * 100, 2));
if (deltaR < _deltaRAbort && deltaT < _deltaTAbort)
break; 8.坐标转换
算出了点云间的相对运动,但他们是在这两帧点云的局部坐标系下的,我们需要把它转换到世界坐标系下,因此需要进行转换
Angle rx, ry, rz;
accumulateRotation(_transformSum.rot_x,
_transformSum.rot_y,
_transformSum.rot_z,
-_transform.rot_x,
-_transform.rot_y.rad() * 1.05,
-_transform.rot_z,
rx, ry, rz);
Vector3 v(_transform.pos.x() - _imuShiftFromStart.x(),
_transform.pos.y() - _imuShiftFromStart.y(),
_transform.pos.z() * 1.05 - _imuShiftFromStart.z());
rotateZXY(v, rz, rx, ry);
Vector3 trans = _transformSum.pos - v;
pluginIMURotation(rx, ry, rz,
_imuPitchStart, _imuYawStart, _imuRollStart,
_imuPitchEnd, _imuYawEnd, _imuRollEnd,
rx, ry, rz);
_transformSum.rot_x = rx;
_transformSum.rot_y = ry;
_transformSum.rot_z = rz;
_transformSum.pos = trans;
transformToEnd(_cornerPointsLessSharp);
transformToEnd(_surfPointsLessFlat);
_cornerPointsLessSharp.swap(_lastCornerCloud);
_surfPointsLessFlat.swap(_lastSurfaceCloud);
lastCornerCloudSize = _lastCornerCloud->points.size();
lastSurfaceCloudSize = _lastSurfaceCloud->points.size();
if (lastCornerCloudSize > 10 && lastSurfaceCloudSize > 100)
{
_lastCornerKDTree.setInputCloud(_lastCornerCloud);
_lastSurfaceKDTree.setInputCloud(_lastSurfaceCloud);
}计算出总的转换 _transformSum
总结:
线特征
1. 线特征首先基于 KD tree 找到最近的一个点
2. 然后基于 该点找到临近 6条线上的次近点 (不在本条线)
3. 然后计算点到直线 及为 代价函数
4. 基于代价函数求解jacobi
5. LM 引入阻尼因子
面特征:
1. 面特征也是基于 KD tree 找到最近的一个点
2. 基于该点在 本条线上找到一个最近点,同时在 非本条线的最近6条线找到次近点
3. 基于 这3个点构造点到平面的距离 及为 代价函数
4. 基于代价函数求解jacobi
5. LM 引入阻尼因子
LM 求解 相对关系:
1. 默认为 匀速运动,各个特征与转换t 存在线性关系(基于时间成比例)
2. 总体求解Jacobian matrix ,使用 引入  阻尼因子 非线性求解 odom 。
阻尼因子 非线性求解 odom 。