初学《视觉SLAM 十四讲》(高翔)---第五讲 笔记
文章目录
-
-
- 笔记部分
- 实践部分(代码注释)
-
-
- ch5 _ imageBasics.cpp
- **ch5_ joinMap.cpp**
-
-
笔记部分



实践部分(代码注释)
ch5 _ imageBasics.cpp
先安装opencv
#include mkdir build
cd build
cmake ..
make
cd ..
build/imageBasics ubuntu.png
ch5_ joinMap.cpp
安装pcl:
sudo add-apt-repository ppa:v-launchpad-jochen-sprickerhof-de/pcl
sudo apt-get update
sudo apt-get install libpcl-all
#include 其中PointT是pcl::PointXYZRGB类型。它重载了-> 返回了指向PointCloud的指针
*Ptr是下面类型 boost::shared_ptr > */
/*pointCloud 是一个智能指针类型的对象 具体可以参考http://blog.csdn.net/worldwindjp/article/details/18843087*/
PointCloud::Ptr pointCloud( new PointCloud );
// pcl::PointCloud::Ptr pointCloud( new pcl::PointCloud );
/*将5张图片 像素坐标转换到相机坐标 之后转换到世界坐标存储到点云格式的变量中 for循环之后用pcl的相关函数将点云转换到pcl能够显示的格式*/
for ( int i=0; i<5; i++ )//转换5张图像
{
cout<<"转换图像中: "<<i+1<<endl;
cv::Mat color = colorImgs[i];
cv::Mat depth = depthImgs[i];
Eigen::Isometry3d T = poses[i];
/* 插入部分
* //color.at(471,537)[0] = 12;//修改图像上的对应像素位置的值
//color.ptr(471)[537][0] = 12;//与上面的效果一样
//测试像素的输出效果,这里无法通过cout<(471,537)[0] 这种方式来输出第一个通道的值,因为每个通道的像素占了8位而unsigned char
// 表示ascii码 所以输出的时候不是正确的数字,可以通过下面的方式强制转化为int类型(或者用自带的类型转换方式进行显示转换),就可以看到内部的值了
//需要注意的一点是 cout页无法输出char类型的变量的地址,也是需要强制转换成void *类型的指针才能正常输出char类型变量的地址信息。
if(colorImgs[i].channels() == 3) {
std::cout << "测试1结果 " << color.ptr(471)[537] << "正确的结果: "
<< (char) color.at(471, 537)[0] << std::endl;
std::cout << depth.ptr(471)[537] << std::endl;
std::cout << colorImgs[i].at(471, 537) << std::endl;
}
插入部分结束
*/
/*对图像像素进行坐标转换,将图像的坐标通过内参矩阵K转换为相机坐标系下的坐标,之后通过外参矩阵T 转化为世界坐标系下的坐标*/
for ( int v=0; v<color.rows; v++ )
for ( int u=0; u<color.cols; u++ )
{
/*通过用Mat中的ptr模板函数 返回一个unsigned short类型的指针。v表示行 根据内部计算返回data头指针 + 偏移量来计算v行的头指针
* 图像为单通道的 depth.ptr ( v ) 来获取行指针*/
unsigned int d = depth.ptr<unsigned short> ( v )[u]; // 深度值16位存储 一般color图像像素中每一个通道是8位
/* 单通道遍历图像的方式总结:
* 注意深度图像的像素占16位 与普通图片每个通道的像素为8位不同
* 1、同样是用上面的双层for循环,遍历图像 用at方式
* for ( int v=0; v(v,u);
*
*
* 2、使用迭代器进行图像的遍历
* 不是基于for循环了
* cv::MatIterator_ begin,end;
* for( begin =depth.begin(), end = depth.end(); begin != end; ){}
*
* 3、使用指针的方式 如本实验的结果
* */
//迭代器的参数是通道数,因为深度图是单通道的,每个像素的值是unsigned short,所以参数是unsigned short
//begin代表像素的开始地方
if ( d==0 ) continue; // 为0表示没有测量到 然后继续进行for循环那么跳过这个像素继续执行 在后面形成点云时需要设置is_dense为假
Eigen::Vector3d point;
point[2] = double(d)/depthScale; //对实际尺度的一个缩放
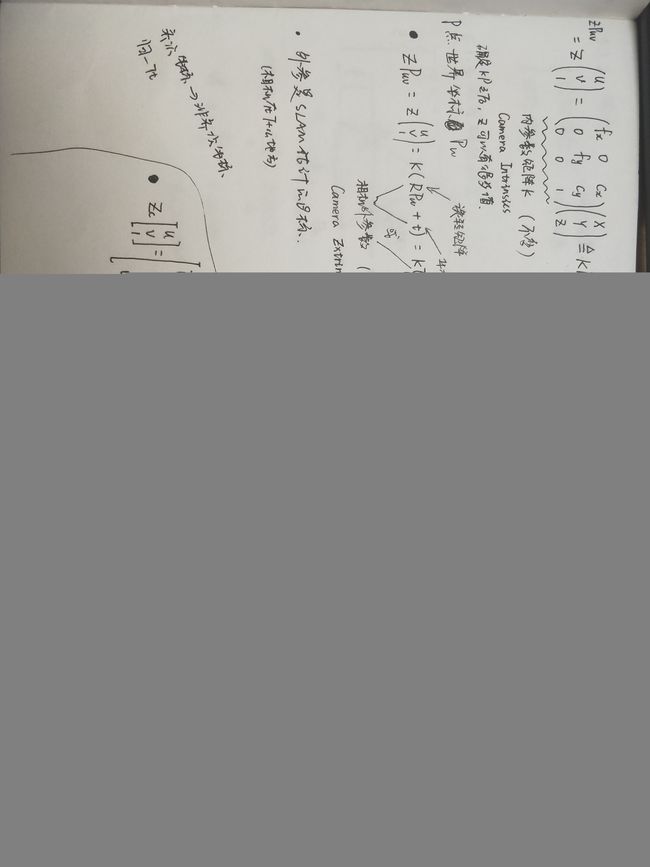
point[0] = (u-cx)*point[2]/fx; //根据书上5.5式子---86页
point[1] = (v-cy)*point[2]/fy;
Eigen::Vector3d pointWorld = T*point; //将相机坐标系转换为世界坐标系
PointT p ;
p.x = pointWorld[0]; //将世界坐标系下的坐标用pcl专门的点云格式存储起来
p.y = pointWorld[1];
p.z = pointWorld[2];
/* color.step 虽然是一个类,但是它内部有一个转换操作符 operator size_t() const;
* 此时的color.size编译器就会把它当做size_t类型的变量,这个值的大小是1920 这个是随着图像的读入MAT类中会有自动转换然后存储的buf[]中 */
p.b = color.data[ v*color.step+u*color.channels() ];
p.g = color.data[ v*color.step+u*color.channels()+1 ];
p.r = color.data[ v*color.step+u*color.channels()+2 ];
/* -> 是智能指针重载的 然后返回的类型就是输入的类型 可以看上面Ptr的解释说明 */
pointCloud->points.push_back( p );//存储格式好的点
}
}
std::cout<<"点云的列和行为 : "<<pointCloud->width<<" "<<pointCloud->height<<std::endl;
//这里有可能深度图中某些像素没有深度信息,那么就是包含无效的像素,所以先置为假,但是如果设置成true的话 也没有看出来有什么不一样的地方
pointCloud->is_dense = false;
std::cout<<"点云的列和行为 : "<<pointCloud->width<<" "<<pointCloud->height<<std::endl;
cout<<"点云共有"<<pointCloud->size()<<"个点."<<endl;
pcl::io::savePCDFileBinary("map.pcd", *pointCloud );//获取pointCloud指向的对象 这个就当做获取普通指针指向的对象来理解,这个对象是在定义的时候new出来的一段内存空间。
return 0;
}
/* 备注: 3通道的图像的遍历方式总结
* 对于单通道来说 每个像素占8位 3通道则是每个矩阵元素是一个Vec3b 即一个三维的向量 向量内部元素为8位数的unsigned char类型
* 1、使用at遍历图像
* for(v)row
* for(u)col
* image.at(v,u)[0] 表示第一个通道的像素的值
* image.at(v,u)[1]
* image.at(v,u)[2]
* 2、使用迭代器方式 (实际上就是一个指针指向了 cv::Mat矩阵元素)
* cv::MatIterator_begin,end;
* for( begin = image.begin(), end = image.end() ; begin != end; )
* (*begin)[0] = ...
* (*begin)[1] = ...
* (*begin)[2] = ...
*
* 3、用指针的方式操作
* for(v)
* for(u)
* image.ptr(v)[u][0] 表示第一个通道
* image.ptr(v)[u][0] 表示第二通道
* .
* .
* .
* */
编译执行:
mkdir build
cd build
cmake ..
make
cd ..
pcl_viewer map.pcd
这里不知道有没有cd …(倒数第二步),因为还没有编译成功,可能是opencv安装的问题。
过了几个月在回来看到这句话,感觉好傻,cd .. 就是回到上一级目录,因为map.pcd是在主目录下的,所以要回到上一级,不想回的话也可以,pcl_viewer ../map.pcd