基于改进YoloV3卷积神经网络的番茄病虫害检测
ABSTRACT
番茄在生长过程中受到各种病虫害的影响。如果控制不及时,就会导致减产甚至歉收。如何有效地控制病虫害,帮助菜农提高番茄的产量是非常重要的,而准确地识别病虫害是最重要的。与传统的模式识别方法相比,基于深度学习的病虫害识别方法可以直接输入原始图像。代替了传统方法中繁琐的图像预处理、特征提取、特征分类等步骤,采用端到端的结构,简化了识别过程,解决了手工设计的特征提取器难以获得最接近对象自然属性的特征表达式的问题。基于深度学习的对象检测应用,不仅可以节省时间和精力,还可以实现实时判断,大大减少病虫害造成的巨大损失,具有重要的研究价值和意义。基于基于深度学习对象检测的检测理论最新研究成果,结合番茄病虫害图像的特点,构建真实自然环境下番茄病虫害数据集,利用图像金字塔优化Yolo V3模型的特征层,实现多尺度特征检测,提高Yolo V3模型的检测精度和速度,准确、快速地检测出番茄病虫害的位置和类别。通过上述研究,突破了自然环境下番茄病虫害图像识别的关键技术,为植物病虫害检测的智能识别和工程应用提供了参考.
Keywords: deep learning, K-means, multiscale training, small object, object detection
INTRODUCTION
经济和社会的不断发展带来了全球性的气候和环境问题。病虫害的发生严重影响着人们的生活。植物病虫害的发病率和发生率越来越高,也越来越复杂(联合国粮食及农业组织)。因此,研究植物病虫害的防治以及病虫害的诊断和防治措施具有十分重要的意义
西红柿起源于南美洲。番茄是重要的经济作物之一,它不仅含有丰富的维生素,而且还可以作为水果食用。近年来,随着西餐的普及,番茄酱越来越受欢迎。人们对番茄的需求越来越大,番茄已逐渐成为人们日常生活中的重要食品。因此,番茄在农业蔬菜生产和蔬菜贸易中具有极其重要的作用。番茄作为世界上种植最广泛的蔬菜之一,不仅产量高,适应性广,而且营养价值高。但与其他作物一样,番茄在生长过程中也受到各种病虫害的影响。番茄病害包括番茄病毒病、番茄线虫病、番茄缺乏病、番茄生理病害、番茄细菌性病害和番茄真菌病害。主要害虫有潜叶螨、温室粉虱、苜蓿夜蛾、烟草青虫、棉铃虫和多食狼蛛等。番茄病虫害非常受当地环境的影响,品种、栽培、管理因素,所以番茄病虫害的类型在不同地区是不同的。中国是世界上最大的蔬菜生产和出口国家之一。山东寿光番茄产业的发展在世界上具有很强的比较优势。设施和露天番茄的种植面积逐渐增加。如果田间管理不当,会增加病虫害侵染的概率,导致病虫害暴发,对番茄产量和品质产生重大影响。田间调查发现,山东省寿光市常见的番茄病害主要有早疫病、晚疫病、曲叶黄病毒、褐斑病、煤污染、灰霉病、叶霉病、脐腐病、曲叶病、花叶病等;常见的番茄害虫主要有潜叶螨和温室粉虱。根据offield调查数据的统计分析,可以看出,番茄病虫害的发病率在不同农户在球场千差万别,在该地区的产量损失1% - -5%有轻度发作和超过30%有严重发作。目前,虽然有许多研究报道了不同地区番茄病虫害的感染和检测,但对山东省寿光市常见的番茄主要病虫害的检测缺乏系统报道。因此,它是非常必要的,山东省为研究对象,并收集和整理相关数据有针对性的早期预警和预防提供理论依据和控制在这个领域
番茄病虫害在不同地区的发生严重影响番茄生产。如果控制不及时,就会导致减产甚至歉收。防治病虫害是减少蔬菜产量损失、减少农药用量、生产无公害蔬菜的最佳途径。当植物生长到已经出现病虫害症状的程度时,即使人们能够作出准确的诊断和适当的治疗,也是一种被动的补救措施。虽然这也是非常必要的,但是在这个时候,农药和农药的应用控制效果差,容易造成环境污染,导致蔬菜中农药残留过多,同时导致对病虫害的抵抗力越来越强,这使得作物抗病工作越来越困难,这是一个不理想的结果。因此,对病虫害的早期预测和预防十分重要。番茄研究(Diaz-Pendon et al., 2010;Gilbertson和Batuman, 2013)显示了植物是如何容易受到疾病和害虫的影响。如何有效地防治病虫害,帮助菜农提高番茄产量,最重要的是对病虫害进行准确的识别。因此,番茄病虫害的鉴定是对科技人员最严峻的挑战。
传统的人工检测病虫害的方法完全依赖于种植者的观察经验,或请专家指导。这种方法不仅速度慢,而且效率低、成本高、主观性强、准确性低、及时性差。随着互联网的不断发展,应用f i n o r m t i o n t e c h n o y l o g p r o v i d e s n e w m e t h o d s n d r f i d e s o作物病虫害'identification。采用高效的图像识别技术可以提高图像识别效率,降低成本,提高识别精度。因此,国内外专家学者做了大量的研究,其中深度学习成为研究的焦点。将深度学习应用于农作物病虫害识别,可以大大减少工作量,缩短识别时间。复杂的网络结构和庞大的数据样本是深度学习最大的特点。深度学习技术的出现为图像识别提供了强有力的技术支持
其中,卷积神经网络(convolutional neural network, CNN)是深度学习的典型模型。基于CNN的病虫害检测方法可以自动提取原始图像中的特征,克服了传统方法人工特征提取的主观性和局限性。端到端的结构简化了识别过程,解决了人工设计的特征提取器无法得到最接近对象自然属性的特征表达式的问题。基于CNN的目标检测的应用,不仅可以节省时间和精力,还可以实现实时判断,大大减少病虫害造成的巨大损失,具有重要的研究价值和意义。基于检测理论的最新研究成果CNN对象检测和番茄病虫害图像的特点,本研究将建立数据集下的番茄病虫害真实的自然环境,优化Yolo V3意思的功能层模型通过使用图像金字塔来实现多尺度特征检测提高Yolo V3模型的检测精度和速度,准确、快速地检测出番茄病虫害的位置和类别。通过上述研究,突破了自然环境下番茄病虫害图像识别的关键技术,为植物病虫害检测的智能识别和工程应用提供了参考
本文采集了真实自然环境下番茄病虫害图像数据,并进行了相应的数据处理,构建番茄病虫害检测数据集。以YOLO v3模型为主体,采用图像金字塔结构融合不同层次的特征,得到不同尺度的特征地图,进行位置和类别预测。然后对对象盒的维度进行聚类,增加锚盒的数量,使模型能够获得更多的对象边缘信息。最后,在训练过程中,使用多尺寸图像进行训练,使模型能够适应不同分辨率的图像。实验表明,改进的YOLO v3算法在保证检测精度的同时提高了检测速度。
RELATED WORK
Comparison Between Traditional Machine Learning Technology and Deep Learning Technology
在深度学习技术发展之前,植物病虫害的图像识别是通过传统技术实现的。随着深度学习技术的发展,研究者们开始将深度学习应用到病虫害图像识别中,并在近年来取得了很多成果(Mohanty et al., 2016;Sladojevic et al., 2016;Wang et al., 2017;Liu et al., 2018;Ferentinos, 2018;Brahimi et al., 2018;Kaur et al., 2019),特别是在苹果、番茄、黄瓜等常见作物的病虫图像识别方面。图像识别的效率和效果大大优于传统的识别方法。传统识别方法与深度学习识别方法的比较如表1所示。

Object Detection Method of Plant Diseases and Insect Pests Based on CNN
传统的机器视觉方法在复杂场景下鲁棒性较差,难以满足复杂场景下的工作要求。CNN在图像识别的性能有了很大的进步在过去的几年里,和ImageNet大规模视觉识别的挑战(ILSVRC),很多出现了深度学习架构,如AlexNet (Krizhenvshky et al ., 2012), GoogleLeNet (Szegedy et al ., 2015), VGGNet (Simonyan Zisserman, 2014),ResNet (Xie et al., 2017),而一般图像识别的准确性也在不断刷新。CNN的辛苦工作和在大规模图像分类竞赛中的巨大突破促使人们考虑将其应用于目标检测问题。与图像分类不同,目标检测需要从图像中检测和定位具体的多个目标,主要分为两类。一种是通过算法生成一系列候选帧作为样本,然后通过CNN对样本进行分类,如RCNN (Girshick et al., 2014)、更快的RCNN (Ren et al., 2016)和R-FCN (Dai et al., 2016)。另一种方法直接将对象边界框定位问题转化为回归问题,不需要生成候选框。具有里程碑意义的算法包括SSD (Liu等,2016)和YOLO (Redmon等,2016)。
Arsenovic et al.(2019)建立了植物病害数据集,收集了不同气象条件下的79265个植株。提出了一个由PDNet-1和PDNet-2同时训练的两级结构PlantDiseasenet。PDNet-1使用Yolo算法中提出的检测方法作为植物叶片的检测工具,PDNet-2负责对植物叶片进行分类。经过训练后,模型的准确率为93.67%。Jiang et al.(2019)提出了一种改进的基于cnn的苹果叶片病虫害实时检测深度学习方法。首先,通过数据扩展和图像标注技术,构建了由实验室图像和复杂图像组成的苹果叶病数据集(ALDD)。在此基础上,提出了一种引入GoogleNet初始结构和彩虹级联的新方法。最后,对所提出的INAR-SSD (SSD带感知模块和彩虹条件)模型进行训练,对5种常见的苹果叶片病虫害进行检测。实验结果表明,该模型的mAP值达到78.80%,检测速度高达23.13 FPS。Tian等(2019)提出了一种基于深度学习的苹果炭疽病损伤检测方法,并利用Densenet对低分辨率的Yolo V3模型的特征层进行了优化,极大地提高了神经网络特征的利用率,提高了Yolo V3模型的检测结果。实验结果表明,该模型的mAP值达到了95.57%。Zheng等(2019)建立了CropDeep物种分类检测数据集,包括31个不同类别的31,147幅图像和49,000多个注释样例。这些图像是用不同的相机在真实的自然环境中采集的,使用最先进的深度学习分类和检测模型提供广泛的基线实验。结果表明,现有的基于深度学习的分类方法可以达到99%以上的分类准确率,而目标检测准确率仅为92%。同时,Yolo V3模型在农业检测任务中具有良好的应用潜力。
Object Detection of Tomato Diseases and Insect Pests Based on CNN
Fuentes et al.(2017)提出了一种番茄病虫害实时识别和定位系统。系统由Fast RCNN、SSD和R-FCN三种网络结构组成。每个网络结构都与不同的特征提取网络(如VGG、RESNET)相结合。该系统具有以下优点:(1)系统使用的图像是现场采集的;(二)考虑到作物可能同时受到多种病虫害的影响;(3)系统具有较强的鲁棒性,可用于实际现场环境中实现检测;(4)系统还可以解决复杂的任务,如侵染状态(早期、晚期)、侵染位置(叶片、秆、果实)和叶片正反两面(正反两面)。Fuentes等(2018)针对虚警和分类不平衡的问题,提出了一种改进的番茄病虫害检测算法框架,该框架由三个主要单元组成:(1)主诊断单元(包围盒发生器),生成包含疫区位置和类别的包围盒;(2)辅助诊断单元(CNNfilter bank),训练每个独立的CNN来过滤误分类样本;(3)整合单元,整合了自主诊断单元和辅助诊断单元的信息,同时保留了真阳性样本,从而消除了第一单元分类错误的假阳性。实验表明,该方法的识别率约为96%。Fuentes et al。(2019)提出了一个方法,不仅能有效地检测和定位装置异常,而且生成的诊断结果,显示异常的位置和描述的症状的句子作为输出,和取得了92.5%的平均精度(地图)在新创建的番茄异常描述数据集。但是,它使用Faster R-CNN来检测目标,需要分两步进行。首先提取区域建议,然后进行检测。而Yolo通过表达式一次直接生成每个类别的坐标和概率。因此,现有研究的实时性有待提高。
Problems of Existing Research and Development Trends
现有研究的发展为CNN在植物病虫害检测中的应用提供了参考和可行性依据,可以避免传统机器视觉方法在特征提取过程中的不足。通过CNN对象检测技术,可以极大地方便植物育种,帮助农民更好地监督自己的田地。然而,植物病虫害的自动识别和检测主要面临以下困难(Barbedo, 2016a;Barbedo, 2016b;Barbedo, 2017;Barbedo, 2018a;Barbedo, 2018b)。
1 图像背景复杂。除了受感染的叶子,图像还可能包含其他元素,如作物秸秆、土壤等。特别是在野外环境下拍摄的照片,不仅背景凌乱,还有光线、角度差异等因素。
2 感染区和健康区之间可能没有明确的界限。
3同一种疾病在不同的发展阶段有不同的特征,甚至在不同的部位。
4 不同病虫害的特征可能相同或略有不同,同一地点同时可能出现多种病虫害。很难把受感染的区域与其他死去的植物组织区分开。
5在昆虫发育的不同阶段(若虫、幼虫和成虫)和不同的龄期,昆虫的形态特征变化很大。特别是对于目标较小的害虫,很难识别。
目前,基于深度学习的植物病虫害研究涉及到广泛的农作物领域,包括各种蔬菜、水果和粮食作物。完成的任务不仅包括病虫害分类和检测的基本任务,还包括感染程度的判断等较为复杂的任务。由于深度学习依赖于大规模的数据集,目前植物病虫害的开放数据集较少,研究人员通常通过比较不同的训练集和测试集比例,使用不同的网络模型来寻找最佳解决方案。然而,这些易感图像的复杂性与真实现场场景仍有一定的差距,基于移动设备的现场病虫害实时检测也存在一定的差距。
THE PRINCIPLE OF YOLO V3 MODEL Yolo V3 Design Idea
Yolo算法由redmon等人(2016)在2016年提出,将目标检测任务转化为回归问题,大大提高了检测速度。Yolo V3 (Redmon and Farhadi, 2018)是在Yolo V2 (Redmon and Farhadi, 2016)的基础上提出的,保持了Yolo V2的检测速度,检测精度大大提高。Yolo V3采用了残差神经网络的思想(He K等,2016)。引入多个残差网络模块和多尺度预测,改善了Yolo V2网络在小目标识别方面的不足。该算法具有较高的检测精度和实时性,是目前目标检测领域中最好的算法之一。该模型使用了大量的3 × 3和1 × 1卷积层,性能良好,并且在后续的多尺度预测中也使用了一些剩余网络结构。最后,它有53个卷积层,所以它也可以被称为Darknet-53

Yolo V3网络在Faster R-CNN中引入了锚盒的思想。对于coco数据集和VOC数据集,采用三种尺度进行预测。每个尺度有三个锚定盒,大尺度的feature map使用小的先验盒,所以你可以根据你想要识别的目标选择合适的先验盒,网络结构可以根据需要预测的尺度变化
THE METHOD OF IMPROVING YOLO V3 MODEL
与整个番茄植株图像相比,病害斑点和害虫是较小的物体。因此,Yolo V3模型在识别番茄病斑病虫害时,在尺度上存在一定的不足。针对这种情况,对Yolo V3模型进行改进,以适应番茄具体病虫害检测任务。改进后的Yolo V3网络结构如图2所示。

Multiscale Feature Detection Based on Image Pyramid
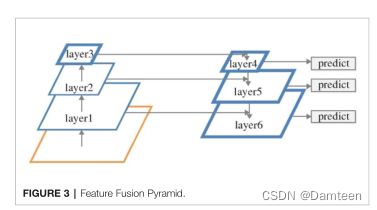
在Yolo V3中,使用Darknet-53网络进行特征提取,并使用特征可视化技术清晰地显示各个层次特征的效果。低级特征具有丰富的细节和位置信息,而高级特征具有丰富的语义特征。从底层到高层,细节在减少,而语义信息在增加。对于位置预测,需要更多低级别的特征信息;对于类别预测,需要更多高级别的局部信息。因此,在图像金字塔模型的基础上,采用向上采样的方法融合高级特征和低级特征,得到不同尺度的特征地图,用于位置和类别预测
右侧的特征金字塔图3是由左侧的特征金字塔生成的。整个过程是这样的:首先对输入图像进行深度卷积,然后对layer2上的feature进行卷积,然后对layer4上的feature进行采样,使其具有相同的大小。然后对处理后的layer2和layer4层进行卷积操作,将得到的结果输入layer5。同样,多层之间进行特征融合,得到多组特征映射进行预测。在此方案的基础上,将处理后的低层特征和高层特征进行累积。这样做的目的是由于底层特征可以提供更准确的位置信息,而多次下采样和上采样操作使得深层网络的位置信息存在误差。因此,将它们结合起来构建深层特征金字塔,并将多层特征信息整合到不同的特征地图上进行类别和位置预测
基于上述特征融合思想,对Yolo V3算法进行了改进。向上采样用于融合高级特征和低级特征。最后,得到三组特征图,并将这三组不同尺度的特征图用于预测。改进后的网络结构如图4所示。
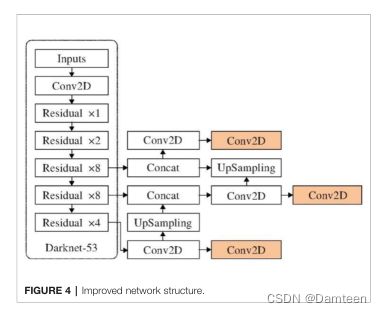
具体的网络结构改进细节:首先,通过Darknet-53得到特征金字塔,对conv53层进行连续的1 × 1和3 × 3卷积运算,得到一组Yolo层进行处理,然后对该层进行一组1 × 1和3 × 3的卷积运算,得到小规模的Yolo层。同时对该层进行上层采样操作,并与Darknet53中的conv45层进行卷积操作,同时使用连续的1 × 1和3 × 3卷积操作,得到第二组要处理的Yolo层,对该层进行1 × 1和3 × 3卷积运算,得到中尺度Yolo层。同时对该层进行上层采样操作,在Darknet-53中对conv29层进行卷积和运算,也通过连续的1 × 1和3 × 3卷积运算得到待处理的第三组Yolo层,并对该层进行1 × 1和3 × 1层的三次卷积运算,得到大规模的Yolo层。经过以上操作,得到三组不同尺度的Yolo特征层,并将这三组特征层用于位置和类别预测。
K-Means Dimension Clustering Algorithm
Yolo V3使用前一个框来预测Yolo V2中边界框的坐标。不同之处是Yolo V3使用kmeans算法预测并得到9个先验盒,并将它们划分为3个比例特征图,其中较大比例特征图使用较小的先验盒来获取对象的更多边缘信息
在Yolo V3中计算的9组先验框的尺寸分别为(10,13)、(16,30)、(33,23)、(30,61)、(62,45)、(59,119)、(116,90)、(156,198)和(373,326)。然而,在实际的检测任务的番茄病虫害,前框尺寸计算Yolo V3意思算法不适合番茄病虫害检测现场,因此很难获得准确的对象边界框信息通过使用原始的盒子尺寸之前Yolo V3意思算法。
因此,在番茄病虫害检测场景中,k - means算法用于集群自建番茄病虫害数据集,和9套前框尺寸中心分别获得如下:(44岁11),(53岁,18),(60,22),25(73),(78年,27),(81年,31),(89,41),(97年,43),(109年,51)。区域由小到大排列,分为三种不同尺度的特征图,其中大尺度的特征图使用较小的先验帧。最后,利用聚类中心对番茄病虫害进行检测
Multiscale Training
在Yolo检测算法中,使用卷积网络提取特征,然后使用全连接层得到预测值。但是,由于全连接层的存在,网络的输入图像尺寸在训练过程中必须是固定的,所以最终的训练网络对不同大小的测试图像没有鲁棒性。
根据自建的番茄病虫害数据集,输入图像的大小不同。因此,为了增强模型对不同图像尺寸的鲁棒性,采用多尺度训练策略。具体来说,去掉Yolo V3网络中的全连接层,改为全卷积操作。图5显示了将全连接层转换为卷积层的过程。
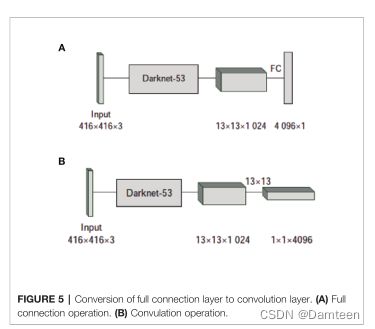
图5使用全连接层进行预测,图5b将全连接层转换为卷积层进行预测。当输入图像尺寸为416 × 416时,通过Darknet-53网络输出13 × 13 × 1024的feature maps。通过包含4,096个神经元的全连接层,得到一组4,096 × 1的feature map,如图5A所示。图5Buses 4,096个13 × 13的卷积核,最终得到1 × 1 × 4,096张feature maps,实质上相当于全连接得到4,096条神经。对于上述两种网络结构,当图像输入尺寸为416 × 416时,网络可以正常运行,但自建番茄病虫害数据集中存在其他尺寸的图片。例如,在输入608 × 608大小的图像时,经过Darknet-53网络后,输出19 × 19 × 1024的feature map。对于图5A的结构,下一步是将feature map与4096个神经元连接。原来建筑的尺寸是13 × 13,现在是19 × 19。因此,在网络的传播过程中,无法使用之前的参数矩阵,网络无法正常运行。对于图5B的结构,将全连接变为卷积运算后,网络可以继续运行,最终得到7 × 7 × 4096的正确输出。因此,将全连接层改为全卷积操作后,使用不同大小的输入图像进行训练,改进算法可以适应不同大小的测试图像。
另外,将全连接层改为全卷积操作后,网络的性能将得到提高。当使用图5中的全连接层时,在网络的正向传播操作中,可以计算出需要708 837 377个参数。当使用图5B中的全卷积操作时,on l y 6 9 6, 3 2 0参数是需要的。因此,将全连接层转换为卷积操作后,可以减少参数数量,减少网络运营量,提高网络性能。
基于以上分析,本文将采用多尺度训练策略对自建番茄病虫害数据集进行训练。因为整个网络hasfive最大池层,网络的低采样率是32,在培训过程中,输入数据集的训练图片大小番茄病虫害分为一系列的32的倍数的值,和大小的计算公式如下:
![]()
其中,Sn是group n 输入图像的大小。网络初始化时,s1为320 × 320。通过公式(1)可以得出输入图像的大小为:320、352,384、416、448、480、512、544,576、608。在训练过程中,每10轮随机选择一种输入图像大小,达到模型能够适应不同大小图像的效果。
EXPERIMENTAL RESULTS AND COMPARATIVE ANALYSIS
Experimental Operation Environment
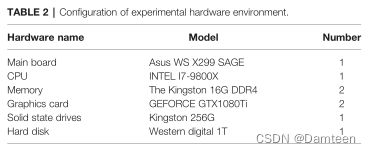
本文的实验硬件环境如表2所示。在此基础上,构建了如下软件环境:Ubuntu 16.04、python、OPPENCV、CUDA等。该框架使用Caffe框架和Darknet-53框架。
Experimental Dataset Building
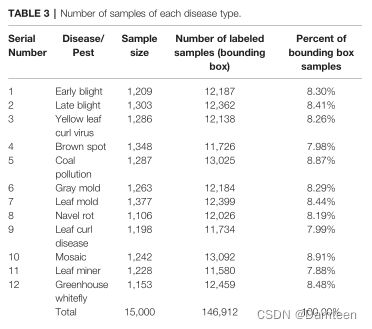
在建立番茄病虫害检测数据集的过程中,利用监测、数码相机、智能手机等不同设备收集当地番茄种植大棚的番茄种植照片。在不同时间段、不同天气条件、不同场景下,随机选取监控视频中的单帧图像和照片作为数据集。各类别的样本数量见表3。标签工具是用来标记图像的。使用该工具,在进行手动操作时,我们只需要在图像中标记自定义对象,工具就可以自动生成相应的配置文件
Model Training
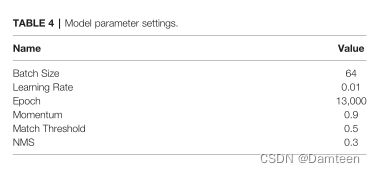
使用Yolo V3官方网站提供的权重参数作为网络训练的初始化参数,随机使用自建番茄病虫害检测训练数据集中的图像对网络参数进行微调,使整个模型的检测效果最优,型号参数设置见表4
Comparative Analysis of Experiments
本文主要使用Yolo V3算法进行实验。改进包括基于图像金字塔的多尺度特征检测、目标帧维聚类和多尺度训练。同时,为了验证模型的有效性、准确性和稳定性,采用SSD、Faster R-CNN和Yolo V3算法进行实验对比分析,以检测精度mAP (Mean Average Precision)和检测时间作为检测效果的评价指标。结果见表5。
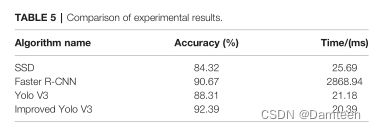
从实验结果可以看出,Faster R-CNN和改进的Yolo V3在目标检测精度方面优于其他两种算法。但是由于在物体检测过程中需要建立RPN网络,这涉及到大量的计算,Faster R-CNN在检测速度上不如改进的Yolo V3。总的来说,改进的Yolo V3算法在检测精度和速度上优于其他三种算法,尤其是检测时间最短。因此,改进后的Yolo V3最适合实时检测任务。改进的Yolo V3算法在兼顾检测精度和检测速度的前提下,可以很好地完成番茄病虫害的检测任务。
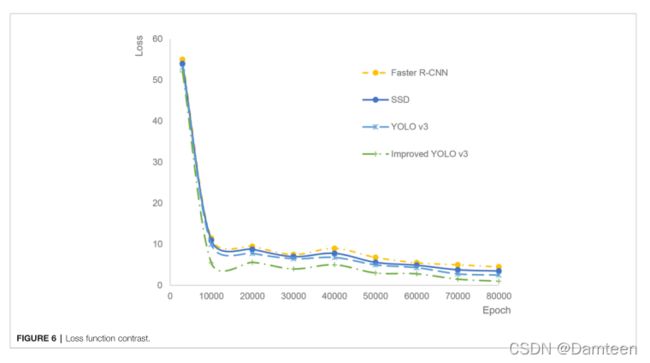
四种算法的损耗曲线如图6所示。可以看出,本文算法的损耗最小,而Faster R-CNN算法的损耗最大。因此,该算法的收敛速度是最快的
Performance Analysis in Small Object Scenario
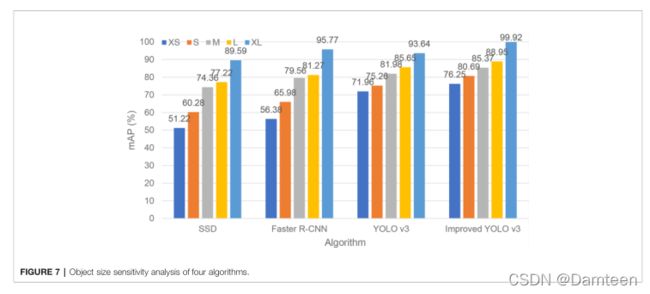
小物体场景下的性能分析对于不同大小的病虫害物体在其不同阶段的表现具有重要意义。本文提出的基于图像金字塔的多尺度检测方法提高了对小目标的检测效果。为了验证小目标检测性能的检测效果,对测试数据集按照对象的大小进行排序。将0-10%、10% - 30%、30% - 70%、70% - 90%的物体大小分为X s、s、M、L、X L,分别代表不同物体的大小。图7显示了原Yolo V3算法和改进算法对不同大小物体的检测性能。
从图7可以看出,改进后的YoLo v3算法对不同尺寸物体的检测精度高于其他三种算法。因此,在番茄病虫害检测时,采用多尺度特征融合策略,将高层特征与低层特征相结合,改进算法在小目标检测方面取得了最好的结果。在昆虫发育的不同阶段(若虫、幼虫和成虫)和不同的龄期,昆虫的形态特征有很大的差异。对于小目标害虫,改进算法取得了较好的效果
Performance Analysis of Different Resolution Images
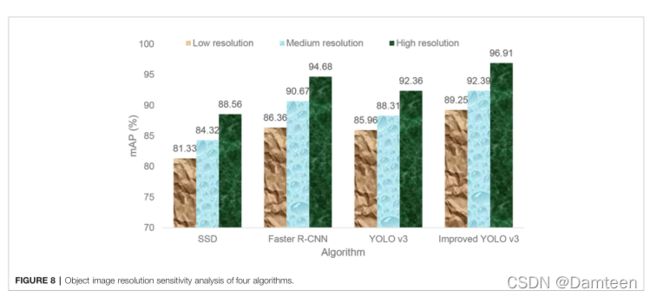
本文提出的多尺度训练方法可以增强模型对不同分辨率图像检测的鲁棒性。为了验证模型对输入的不同分辨率图像的检测效果,本文将测试数据集图像划分为三个不同分辨率大小的{320,608,1024},分别代表低分辨率、中分辨率和高分辨率三种图像类型。图8为四种算法对不同分辨率图像的检测精度性能。
从图8可以看出,改进后的Yolo V3算法对不同分辨率图像的检测精度高于其他三种算法。可以看出,本文采用的多尺度训练检测策略不仅增强了模型对不同分辨率图像的适应性,而且能够准确、快速地检测出番茄病虫害的位置和类别。
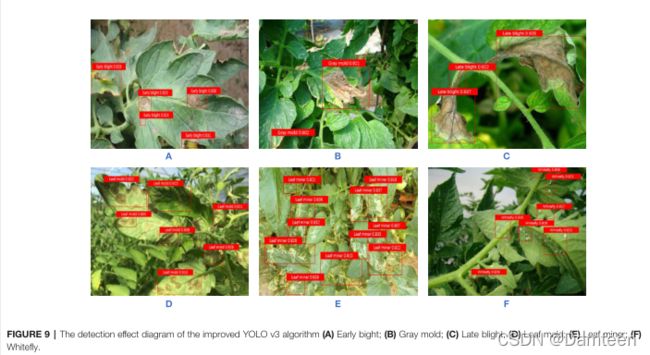
另外,为了更直观地展示本文算法的检测效果,选取了一些检测图像,如图9所示。可以看出,本文算法在图像中存在多个目标和小目标的情况下,能够正确检测出目标的位置和类别,有效避免了误检和漏检的问题
CONCLUSIONS AND FUTURE DIRECTIONS
Conclusions
1. 本文提出了一种改进的Yolo V3算法来检测番茄病虫害。通过基于图像金字塔的多尺度特征检测、目标包围盒维数聚类和多尺度训练对Yolo V3网络进行改进。实验结果表明,该算法的检测精度为92.39%,检测时间仅为20.39 ms。因此,对于番茄病虫害检测任务,本文提出的改进Yolo V3算法不仅能保持较高的检出率,还能满足实时检测的要求,能够准确、快速地检测出番茄病虫害的位置和类别
2. 与SSD、Faster R-CNN和原Yolo V3相比,改进后的Yolo V3 CNN可以实现更高的检测精度和更短的检测时间,满足番茄病虫害实时检测精度和速度的要求。
3.在小目标场景和不同分辨率图像下的性能分析进一步验证了改进的Yolo V3网络对复杂环境下不同目标大小和不同分辨率图像的检测具有很强的鲁棒性,具有较高的检测定位精度。如何满足复杂环境下番茄病虫害检测的需要
Future Directions
1. 在不同的生长周期中,病虫害的表现是不同的。因此,对病虫害图像的划分要更加细致,以生长期为标准,对同一类病虫害进行划分。在未来,数据集的划分将得到改进
2. 为了使模型得到更广泛的应用,接下来的工作将收集大量不同类型病虫害的高质量图像,并进行其他病虫害的插入,优化和调整模型,并将其扩展到其他作物,从而提高农作物病虫害图像识别的实用性和准确性
3.构建番茄病害智能巡逻机器人。在实际温室番茄种植基地中,番茄病害智能巡检机器人可以24小时工作。改进后的Yolo V3将搭载带有疾病检测传感器的移动机器人手臂,进一步提高其实用性。通过对病变进行实时捕捉,对番茄病害进行无损检测,达到番茄病害早期检测、早期诊断的目的。