ceres快速教材及学习笔记(四)bundl adjustment,《视觉slam十四讲》第十讲ceres例子
0. 前言
本文是根据ceres官方教程内容ceres-solver官方教程链接,再结合自己理解的一个ceres快速学习笔记。
在博文ceres快速教材及学习笔记(一)hello,world!中,我们学习了
最小二乘问题数学模型;
弄清楚了各个参数的意义;
利用学习的最小二乘问题数学模型和ceres解决了一个最简单的最小二乘问题;在博文ceres快速教材及学习笔记(二)曲线拟合,稍复杂的例子中,我们学会了怎样使用多个参数块,如何添加多个误差项。接下来在此基础上我们来求解更加复杂的问题,以处理如何使不同的误差项有不同代价函数以及参数块的情况。
在博文,ceres快速教材及学习笔记(三)鲍威尔方程Powell’s Function,中何使不同的误差项有不同代价函数以及参数块的情况。
接下来,在《视觉slam十四讲》第十讲ceres例子(源码在这里)中,我们将学会bundle adjustment。学会处理每个误差项输出维度不为一的情况
1.Bundle Adjustment
1.1准备工作
该项目分为以下几个步骤以实现bundle adjustment。
设置参数
读取ground truth 真实值
将真实值转化格式后输出initial.ply
基于真实值加入perturbation,也就是噪声,来模拟实际情况中获得的数据。
基于加了噪声的数据进行bundle adjustment。
输出BA之后的数据生成final.ply在项目提供一个problem-16-22106-pre.txt文件:
16 22106 83718
0 0 -3.859900e+02 3.871200e+02
1 0 -3.844000e+01 4.921200e+02
2 0 -6.679200e+02 1.231100e+02
7 0 -5.991800e+02 4.079300e+02
12 0 -7.204300e+02 3.143400e+02
13 0 -1.151300e+02 5.548999e+01
0 1 3.838800e+02 -1.529999e+01
其含义,在提供该数据的官方网站上能找到:
...
...
...
翻译
假设相机数量为m,路标点数量为n,观测数量为ob,则
<观测1使用的相机序号> <观测1看到的路标点> <此次观测的路标点在图像中的位置x_1> <此次观测的路标点在图像中的位置y_1>
...
<观测ob使用的相机序号> <观测ob看到的路标点> <观测1看到的路标点x_ob> <观测1看到的路标点y_ob>
<相机1参数>
...
<相机m参数>
<路标点1参数>
...
<路标点n参数> 1.2问题思考
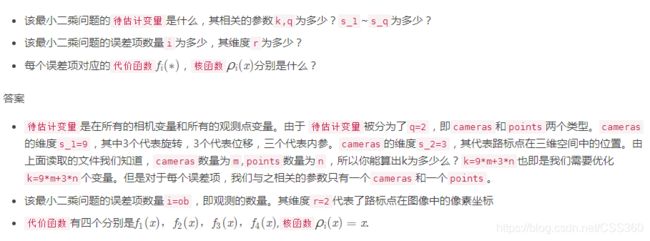
思考以下问题
首先,回答以下问题:(以下参数的各个含义点击这里):
1.3.代码讲解
先来看main函数
int main(int argc, char** argv)
{ //设置参数
BundleParams params(argc,argv); // set the parameters here.
google::InitGoogleLogging(argv[0]);
std::cout << params.input << std::endl;
if(params.input.empty()){
std::cout << "Usage: bundle_adjuster -input ";
return 1;
}
//求解BA
SolveProblem(params.input.c_str(), params);
return 0;
}
进入SolveProblem函数
void SolveProblem(const char* filename, const BundleParams& params)
{
//读取文件
BALProblem bal_problem(filename);
// show some information here ...
std::cout << "bal problem file loaded..." << std::endl;
std::cout << "bal problem have " << bal_problem.num_cameras() << " cameras and "
<< bal_problem.num_points() << " points. " << std::endl;
std::cout << "Forming " << bal_problem.num_observations() << " observatoins. " << std::endl;
// store the initial 3D cloud points and camera pose..
//储存初始的(未BA前的)3d点云位置以及相机位置
if(!params.initial_ply.empty()){
bal_problem.WriteToPLYFile(params.initial_ply);
}
std::cout << "beginning problem..." << std::endl;
// add some noise for the intial value
//给camera,points都加上噪音
srand(params.random_seed);
bal_problem.Normalize();
bal_problem.Perturb(params.rotation_sigma, params.translation_sigma,
params.point_sigma);
std::cout << "Normalization complete..." << std::endl;
//开始构建最小二乘问题啦
Problem problem;
//具体构建的细节在这个函数里
BuildProblem(&bal_problem, &problem, params);
std::cout << "the problem is successfully build.." << std::endl;
//配置求解器
Solver::Options options;
SetSolverOptionsFromFlags(&bal_problem, params, &options);
options.gradient_tolerance = 1e-16;
options.function_tolerance = 1e-16;
Solver::Summary summary;
Solve(options, &problem, &summary);
std::cout << summary.FullReport() << "\n";
//导出未BA后的3d点云位置以及相机位置
// write the result into a .ply file.
if(!params.final_ply.empty()){
bal_problem.WriteToPLYFile(params.final_ply);
// pay attention to this: ceres doesn't copy the value into optimizer, but implement on raw data!
}
}
接下来看看BuildProblem(&bal_problem, &problem, params);看他如何构建BA问题
void BuildProblem(BALProblem* bal_problem, Problem* problem, const BundleParams& params)
{
const int point_block_size = bal_problem->point_block_size();
const int camera_block_size = bal_problem->camera_block_size();
double* points = bal_problem->mutable_points();//构建points参数类型的优化变量
double* cameras = bal_problem->mutable_cameras();//构建cameras参数类型的优化变量
// Observations is 2 * num_observations long array observations
// [u_1, u_2, ... u_n], where each u_i is two dimensional, the x
// and y position of the observation.
const double* observations = bal_problem->observations();
//有观测数量有多少就有多少误差项
for(int i = 0; i < bal_problem->num_observations(); ++i){
CostFunction* cost_function;
// Each Residual block takes a point and a camera as input
// and outputs a 2 dimensional Residual
//在这里构建代价函数costfunction每个误差块是以一个points和一个cameras为输入的
cost_function = SnavelyReprojectionError::Create(observations[2*i + 0], observations[2*i + 1]);
// If enabled use Huber's loss function.
//设置是否开启核函数
LossFunction* loss_function = params.robustify ? new HuberLoss(1.0) : NULL;
// Each observatoin corresponds to a pair of a camera and a point
// which are identified by camera_index()[i] and point_index()[i]
// respectively.
double* camera = cameras + camera_block_size * bal_problem->camera_index()[i];
double* point = points + point_block_size * bal_problem->point_index()[i];
problem->AddResidualBlock(cost_function, loss_function, camera, point);
}
}
接下来看看SnavelyReprojectionErrorcostfunction
class SnavelyReprojectionError
{
public:
SnavelyReprojectionError(double observation_x, double observation_y):observed_x(observation_x),observed_y(observation_y){}
//重载()以获得一个仿函数functor
template
bool operator()(const T* const camera,
const T* const point,
T* residuals)const{
// camera[0,1,2] are the angle-axis rotation
T predictions[2];
CamProjectionWithDistortion(camera, point, predictions);
//输出维度是2,代表着你在图像中观测到的路标点的像素坐标
residuals[0] = predictions[0] - T(observed_x);
residuals[1] = predictions[1] - T(observed_y);
return true;
}
static ceres::CostFunction* Create(const double observed_x, const double observed_y){
//在这里返回代价函数,这里是自动求导的,模版参数分别为<仿函数类型,误差项输出维度r,cameras维度s_1,points维度s_2>
return (new ceres::AutoDiffCostFunction(
new SnavelyReprojectionError(observed_x,observed_y)));
}
private:
double observed_x;
double observed_y;
};
更多《计算机视觉与图形学》知识,可关注下方公众号:
