V-REP通过C++程序控制仿真
v-rep介绍
v-rep是一个机器人仿真平台,具有大量的模块和良好的架构,适合做原型验证,算法开发等工作。最重要的是,它的教育版本是完全开源的。具体的中文介绍
https://blog.csdn.net/weixin_39901416/article/details/78898266
官网主页:
http://www.coppeliarobotics.com/
前置工作
windows版下载地址:
http://www.coppeliarobotics.com/downloads.html
下载速度较慢,可以下载我上传的版本
https://download.csdn.net/download/iamqianrenzhan/11055344
如何在c++中和仿真环境通信
1.remoteApi库编译
在安装目录 V-REP3\V-REP_PRO_EDU\programming\remoteApiBindings\lib下用 vs2015 打开remoteApiSharedLib-64工程,进行编译,编译过程中报错
warning LNK4042: 对象被多次指定;已忽略多余的指定
和
无法解析的外部符号
这时按照 https://blog.csdn.net/gupar/article/details/52860794
中做法,在工程属性 :C/C++ >> 输出文件 >>对象文件名 把 $(IntDir) 修改为: $(IntDir)%(RelativeDir)
编译成功后会生成remoteApi.dll和remoteApiSharedLib-64.lib,这两个文件在接下来会用到。
dll文件所在路径加入环境变量PATH。
2.仿真开启
打开v-rep软件,把ABB IRB 140.ttm拖到仿真界面
双击脚本图标,弹出脚本编辑框,在function sysCall_init() 下第一行添加

simExtRemoteApiStart(3000)
3000代表端口号
然后开启仿真(一定要先开启仿真再启动c++控制程序)。
3.C++代码控制仿真
新建空白工程,设置包含文件路径和刚才生成的库文件路径
添加预处理
WIN32
NDEBUG
_CONSOLE
NON_MATLAB_PARSING
MAX_EXT_API_CONNECTIONS=255zasda
在代码文件中添加如下代码:
#include
#include
#include
extern "C" {
#include "extApi.h"
}
int main()
{
int Port = 3000;
int PositionControlHandle;
simxChar* Adresse = "127.0.0.1";
float position[3];
float positionmove[3];
//智能制造单元控制系统 Intelligent manufacturing unit control system
//imucs
int clientID = simxStart(Adresse, Port, true, true, 2000, 5);
if (clientID != -1)
{
printf("V-rep connected.");
int count = 0;
//extApi_sleepMs(300);
while (simxGetConnectionId(clientID) != -1)
{
count++;
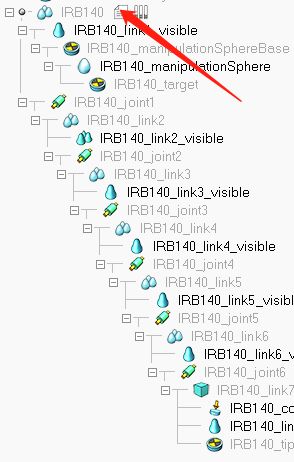
simxGetObjectHandle(clientID, "IRB140_manipulationSphere", &PositionControlHandle, simx_opmode_oneshot);
simxGetObjectPosition(clientID, PositionControlHandle, -1, position, simx_opmode_oneshot);
positionmove[0] = position[0];
positionmove[1] = position[1] + 0.01* sin(count/10.0);
positionmove[2] = position[2];
simxSetObjectPosition(clientID, PositionControlHandle, -1, positionmove, simx_opmode_oneshot);
printf("(%f,%f,%f)\r\n", position[0], position[1], position[2]);
}
simxFinish(clientID);
}
else {
printf("V-rep can't be connected.");
//extApi_sleepMs(300);
}
return 0;
}
运行程序,可以看到仿真界面中的机械臂安装发送的指令运动