Cartographer使用3D激光雷达建立2D导航图(概率栅格地图)
Cartographer使用3d激光雷达建2d图
- 1.尝试过的方法
- 1.1 参考官方demo_backpack_3d.launch文件,直接建图
- 1.2在线或离线生成pbstream文件,再转成pgm,yaml文件
- 2.最终方案!使用3d点云数据直接在rviz上生成2d图(导航图,栅格图)
引言:确切说应该是使用3d激光雷达建立概率栅格地图,一开始我使用了官方demo_backpack_3d.launch经过修改一些参数,但在rviz中显示的图,只有黑色和灰色,也就是代表的障碍物体和未知区域,缺少白色区域就是已知区域(可通行区域)。当只有灰色和黑色的时候,这个地图是没有办法拿来做导航用的。所以这个问题必须解决。
声明:北科天汇32线激光雷达
1.尝试过的方法
1.1 参考官方demo_backpack_3d.launch文件,直接建图
先贴配置图
1. my_demo_backpack_3d.launch
<launch>
<param name="/use_sim_time" value="true" />
<include file="$(find cartographer_ros)/launch/demo_my_robot_3d.launch" />//换成自己的配置launch文件
<node name="rviz" pkg="rviz" type="rviz" required="true"
args="-d $(find cartographer_ros)/configuration_files/demo_3d.rviz" />
<node name="playbag" pkg="rosbag" type="play"
args="--clock $(arg bag_filename)" />
</launch>
如果是边跑边建图,则use_sim_time应该设置为false。我是先录制的bag包,然后播放生成的图。
2. demo_my_robot_3d.launch
<launch>
<param name="robot_description"
textfile="$(find cartographer_ros)/urdf/my_backpack_3d.urdf" />//换成自己的机器人配置文件
<node name="robot_state_publisher" pkg="robot_state_publisher"
type="robot_state_publisher" />
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename my_robot_3d.lua" //换成自己配置文件
output="screen">
<remap from="points2" to="/rfans_driver/rfans_points" />//换成自己的bag包数据中的点云话题
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
</launch>
会看点云话题吗?用这个命令查看
# rosbag info *****.bag
 看到这个topics中sensor_msgs/PointCloud2的这个话题类型了吗?前面的就是你自己数据的点云话题,我的点云话题是/rfans_driver/rfans_points,所以在launch文件中,把点云话题改成自己的
看到这个topics中sensor_msgs/PointCloud2的这个话题类型了吗?前面的就是你自己数据的点云话题,我的点云话题是/rfans_driver/rfans_points,所以在launch文件中,把点云话题改成自己的
3. 配置lua文件
首先看一下使用官方backpack_3d.lua文件生成图的效果
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "base_link",
published_frame = "base_link",
odom_frame = "odom",
provide_odom_frame = true,
publish_frame_projected_to_2d = false,
use_odometry = false,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 0,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 2,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
TRAJECTORY_BUILDER_3D.num_accumulated_range_data = 160
MAP_BUILDER.use_trajectory_builder_3d = true
MAP_BUILDER.num_background_threads = 7
POSE_GRAPH.optimization_problem.huber_scale = 5e2
POSE_GRAPH.optimize_every_n_nodes = 320
POSE_GRAPH.constraint_builder.sampling_ratio = 0.03
POSE_GRAPH.optimization_problem.ceres_solver_options.max_num_iterations = 10
POSE_GRAPH.constraint_builder.min_score = 0.62
POSE_GRAPH.constraint_builder.global_localization_min_score = 0.66
return options
看一下官方3d bag包跑出来的效果
 看起来效果还可以吧
看起来效果还可以吧
再看一下我建的图
我先说一下这张图的问题:1.为什么没有出现白色区域(已知区域)2.为什么有这么多的噪点
后来重新调整了lua文件
my_robot_3d.lua
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "base_link", --imu
published_frame = "base_link", --laser
odom_frame = "odom",
provide_odom_frame = false,
publish_frame_projected_to_2d = false,
use_odometry = false,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans =0,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 1,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1, --1.
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
TRAJECTORY_BUILDER_2D.min_z = 0.1
TRAJECTORY_BUILDER_2D.max_z = 1.5
TRAJECTORY_BUILDER_3D.num_accumulated_range_data = 1 --1
TRAJECTORY_BUILDER_3D.min_range = 1.3 --houjia
TRAJECTORY_BUILDER_3D.max_range = 25. --houjia
TRAJECTORY_BUILDER_3D.use_online_correlative_scan_matching = true --houjia
--TRAJECTORY_BUILDER_3D.submaps.num_range_data=90.
MAP_BUILDER.use_trajectory_builder_3d = true
MAP_BUILDER.num_background_threads = 7
POSE_GRAPH.optimization_problem.huber_scale = 5e2
POSE_GRAPH.optimize_every_n_nodes = 60
POSE_GRAPH.constraint_builder.sampling_ratio = 0.03
POSE_GRAPH.optimization_problem.ceres_solver_options.max_num_iterations = 10
POSE_GRAPH.constraint_builder.min_score = 0.62
POSE_GRAPH.constraint_builder.global_localization_min_score = 0.66
return options
出现了如下效果图,噪点没有了,至关重要的一个参数是TRAJECTORY_BUILDER_3D.use_online_correlative_scan_matching = true
 这个参数的作用就是开启实时的闭环检测来进行前段的扫描匹配,所以生成的图效果非常好,就是计算量会增大,消耗更多CPU。
这个参数的作用就是开启实时的闭环检测来进行前段的扫描匹配,所以生成的图效果非常好,就是计算量会增大,消耗更多CPU。
但是这个图还是不能用来导航啊,只有灰色和黑色区域(也就是障碍物和未知区域)。
现在剩下的问题就是要解决白色区域了
1.2在线或离线生成pbstream文件,再转成pgm,yaml文件
在线生成pbstream文件,还是启动上个方法的launch文件
# roslaunch cartographer_ros my_demo_backpack_3d.launch bag_filename:=${HOME}/Downloads/***.bag
在rviz生成图了之后,启动一个新终端使用如下命令:
# rosservice call /finish_trajectory 0 //停止接受传感器数据
# rosservice call /write_state /home/路径/***.pbstream //生成pbstream文件
接下来就是生成pgm文件
# roslaunch cartographer_ros assets_writer_ros_map.launch bag_filenames:=${HOME}/Downloads/2020-04-29-11-25-22.bag pose_graph_filename:=${HOME}/Downloads/2020-04-29-11-25-22.bag.pbstream
把bag文件路径和pbstream文件路径改成你自己的,生成图如下:
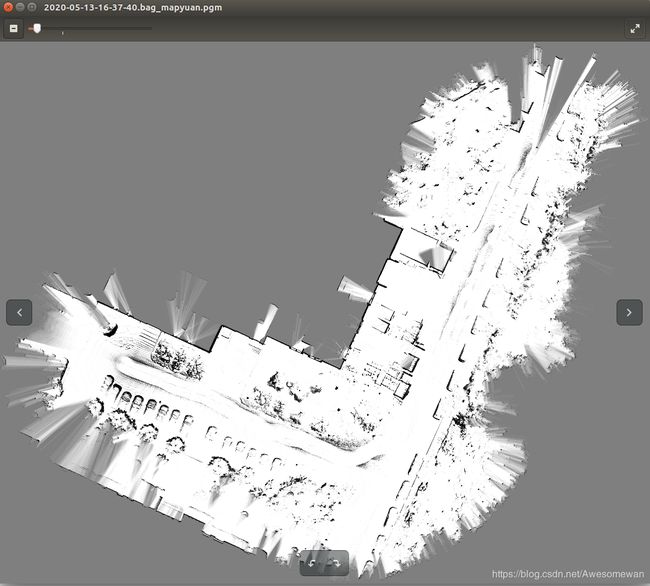
但是在路线闭环的情况下,就会出现激光雷达的波纹信息,如下图

虽然这种方法有白色可通行区域,但这个雷达波纹和行车轨迹看起来很恶心啊。
离线的方法我就不说了,效果是一样的。离线生成启动的launch文件是
roslaunch cartographer_ros offline_backpack_3d.launch bag_filenames:=${HOME}/Downloads/2020-05-13-16-37-40.bag
一样把launch文件换成自己的点云话题!运行完之后会直接生成pbstream文件
2.最终方案!使用3d点云数据直接在rviz上生成2d图(导航图,栅格图)
这种方法是需要里程计/odom信息,不用imu信息
先贴自己配置图
demo_zch_2d.launch
<launch>
<param name="/use_sim_time" value="true" />
<!-- <node pkg="tf" type="static_transform_publisher" name="base_laser_broadcaster" args="0 0 0 0 0 0 laserbase_footprint /base_footprint 20" /> -->
<include file="$(find cartographer_ros)/launch/zch_rslidar_2d.launch" />
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory
$(find cartographer_ros)/configuration_files
-configuration_basename zch_rslidar_2d.lua"//你自己的lua文件
output="screen">
<remap from="/odom" to="/odom" /> //你自己的里程计话题
<remap from="/points2" to="/rfans_driver/rfans_points" /> //你自己的点云话题
</node>
<node name="rviz" pkg="rviz" type="rviz" required="true"
args="-d $(find cartographer_ros)/configuration_files/rslidar_2d.rviz" />
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
</launch>
zch_rslidar_2d.launch
<launch>
<param name="robot_description"
textfile="$(find cartographer_ros)/urdf/my_backpack_3d.urdf" />
<node name="robot_state_publisher" pkg="robot_state_publisher"
type="robot_state_publisher" />
</launch>
zch_rslidar_2d.lua
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "base_link",
published_frame = "base_link",
odom_frame = "odom",
provide_odom_frame = true,
publish_frame_projected_to_2d = false,
use_odometry = true,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 0,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 1,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 0.5,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.submaps.num_range_data = 35
TRAJECTORY_BUILDER_2D.min_range = 0.6
TRAJECTORY_BUILDER_2D.max_range = 30.
TRAJECTORY_BUILDER_2D.min_z = -0.3
TRAJECTORY_BUILDER_2D.max_z = 1.5
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 5.
TRAJECTORY_BUILDER_2D.use_imu_data = false
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.motion_filter.max_angle_radians = math.rad(0.1)
POSE_GRAPH.optimize_every_n_nodes = 35 --houjia 35
POSE_GRAPH.optimization_problem.odometry_translation_weight = 1e3
POSE_GRAPH.optimization_problem.odometry_rotation_weight = 1e3
--POSE_GRAPH.optimization_problem.huber_scale = 1e2
--POSE_GRAPH.constraint_builder.min_score = 0.65
return options
我后知后觉直接2d建图,它不香吗?看效果建图如下:
 哇,真漂亮!
哇,真漂亮!
运行命令如下:
# roslaunch cartographer_ros demo_zch_2d.launch
再开启一个终端
# rosbag play --clock 2020-06-01-14-22-23.bag
保存地图命令
# rosrun map_server map_saver -f ***//你起的名字,例如my_map
我的urdf文件也给你们参考吧
my_backpack_3d.urdf
<robot name="cartographer_backpack_3d">
<material name="orange">
<color rgba="1.0 0.5 0.2 1" />
</material>
<material name="gray">
<color rgba="0.2 0.2 0.2 1" />
</material>
<link name="imu">
<visual>
<origin xyz="0 0 0"/>
<geometry>
<box size="0.06 0.04 0.02" />
</geometry>
<material name="orange" />
</visual>
</link>
<link name="laser">
<visual>
<origin xyz="0 0 0"/>
<geometry>
<cylinder length="0.07" radius="0.05" />
</geometry>
<material name="gray" />
</visual>
</link>
<link name="base_link" />
<joint name="imu_joint" type="fixed">
<parent link="base_link" />
<child link="imu" />
<origin xyz="0 0 0" rpy="0 0 0"/>
</joint>
<joint name="laser_joint" type="fixed">
<parent link="base_link" />
<child link="laser" />
<origin xyz="0 0 0" rpy="0 0 0"/>
</joint>
<!-- <joint name="imu2lidar" type="fixed">
<parent link="laser" />
<child link="imu" />
<origin xyz="0 0 0"/>
</joint> -->
</robot>
再给大家推荐一个修图软件 kolourpaint
祝大家顺利!