探究--gazebo里 关节是如何动起来的____实现默认插件joint控制
gazebo里 关节是如何动起来的
- 先实现一个机器人joint的控制
- 创建一个有joint的xacro文件
- 添加 transmission 标签
- 加入 gazebo_ros_control plugin 的标签
- 创建一个 .yaml配置文件(配置控制器)
- 写launch启动文件
- 执行该launch文件
- 发布控制命令
- 探究怎么实现的
- 写自己的插件实现控制
先实现一个机器人joint的控制
创建一个机器人类似云台,实现航向和俯仰控制。
创建一个有joint的xacro文件
如何构建 及各标签含义及使用 参考:gazebo tutorial :Using a URDF in Gazebo
给出xacro文件代码及注释
<robot name="swivel" xmlns:xacro="http://www.ros.org/wiki/xacro">
<material name="SwivelWhite"> <color rgba="1.0 1.0 1.0 1"/>material>
<material name="SwivelLightGray"><color rgba="0.8 0.8 0.8 1"/>material>
<material name="SwivelMedGray"> <color rgba="0.6 0.6 0.6 1"/>material>
<material name="SwivelDarkGray"> <color rgba="0.4 0.4 0.4 1"/>material>
<material name="SwivelRed"> <color rgba="0.5 0.4 0.4 1"/>material>
<material name="SwivelGreen"> <color rgba="0.4 0.5 0.4 1"/>material>
<material name="SwivelBlue"> <color rgba="0.4 0.4 0.5 1"/>material>
<link name="base">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry >
<box size="0.1 0.1 0.02" />
geometry>
<material name="SwivelLightGray" />
visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry >
<box size="0.1 0.1 0.02" />
geometry>
collision>
<inertial>
<mass value="9"/>
<inertia ixx="9.0" ixy="0.0" ixz="0.0" iyy="9.0" iyz="0.0" izz="9.0"/>
inertial>
link>
<gazebo reference="base">
<material>Gazebo/Graymaterial>
gazebo>
<link name="link_1">
<visual>
<origin xyz="0 0 0.06" rpy="0 0 0" />
<geometry >
<box size="0.05 0.05 0.1" />
geometry>
<material name="SwivelBlue" />
visual>
<collision>
<origin xyz="0 0 0.06" rpy="0 0 0" />
<geometry >
<box size="0.05 0.05 0.1" />
geometry>
collision>
<inertial>
<mass value="4"/>
<inertia ixx="4.0" ixy="0.0" ixz="0.0" iyy="4.0" iyz="0.0" izz="4.0"/>
inertial>
link>
<gazebo reference="link_1">
<material>Gazebo/Bluematerial>
gazebo>
<joint name="swivel_J0" type="revolute">
<parent link="base"/>
<child link="link_1"/>
<origin xyz="0 0 0" rpy="0 0 0" />
<axis xyz="0 0 1" />
<limit lower="0" upper="6.28" effort="10"
velocity="1.0" />
<joint_properties damping="0.0" friction="0.0"/>
joint>
<link name="link_2">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry >
<box size="0.1 0.2 0.1" />
geometry>
<material name="SwivelRed" />
visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry >
<box size="0.1 0.2 0.1" />
geometry>
collision>
<inertial>
<mass value="2"/>
<inertia ixx="2.0" ixy="0.0" ixz="0.0" iyy="2.0" iyz="0.0" izz="2.0"/>
inertial>
link>
<gazebo reference="link_2">
<material>Gazebo/Redmaterial>
gazebo>
<joint name="swivel_J1" type="revolute">
<parent link="link_1"/>
<child link="link_2"/>
<origin xyz="0 0 0.190" rpy="0 0 0" />
<axis xyz="1 0 0" />
<limit lower="-1.745" upper="2.356" effort="10"
velocity="1.0" />
<joint_properties damping="0.0" friction="0.0"/>
joint>
<link name="camera_mount">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry >
<box size="0.05 0.05 0.05"/>
geometry>
<material name="SwivelGreen" />
visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry >
<box size="0.05 0.05 0.05"/>
geometry>
collision>
<inertial>
<mass value="0.5"/>
<inertia ixx="0.5" ixy="0.0" ixz="0.0" iyy="0.5" iyz="0.0" izz="0.5"/>
inertial>
link>
<gazebo reference="camera_mount">
<material>Gazebo/Greenmaterial>
gazebo>
<joint name="camera_J2" type="fixed">
<parent link="link_2"/>
<child link="camera_mount"/>
<origin xyz="0 0 0" rpy="0 0 0" />
<axis xyz="1 0 0" />
<limit lower="-2.094" upper="2.670" effort="10"
velocity="1.0" />
<joint_properties damping="0.0" friction="0.0"/>
joint>
robot>
显示模型如下所示
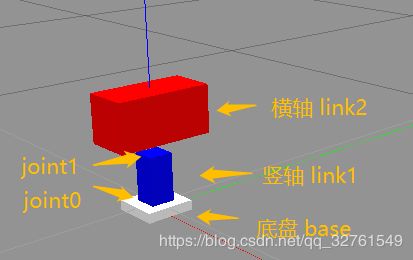
此时模型只是能在gazebo中显示出来,还不能做任何的动作
添加 transmission 标签
具体参考:gazebo Tutorial: ROS Control
将ros_control 用于自己的仿真机器人,需要在普通的URDF文件中加入其它标签。
< transmission >标签用于对应link的执行器到joint 。
其中主要的元素有:
- < joint name=" " > name必须关联到一个joint ,并且只能关联到一个 代码后面有解释
- < type > 传动器的种类,目前仅transmission_interface/SimpleTransmission可以实现
- < hardwareInterface > 在 < actuator >和 < joint >标签内部,gazebo_ros_control plugin 加载什么类型的硬件接口 (position, velocity or effort interfaces)
在link1与base的joint (swivel_J0) 后面加入
<transmission name="tran1">
<type>transmission_interface/SimpleTransmissiontype>
<joint name="swivel_J0">
<hardwareInterface>EffortJointInterfacehardwareInterface>
joint>
<actuator name="motor1">
<hardwareInterface>EffortJointInterfacehardwareInterface>
<mechanicalReduction>1mechanicalReduction>
actuator>
transmission>
在link1与ling2的joint(swivel_J1)
<transmission name="tran2">
<type>transmission_interface/SimpleTransmissiontype>
<joint name="swivel_J1">
<hardwareInterface>EffortJointInterfacehardwareInterface>
joint>
<actuator name="motor2">
<hardwareInterface>EffortJointInterfacehardwareInterface>
<mechanicalReduction>1mechanicalReduction>
actuator>
transmission>
加入 gazebo_ros_control plugin 的标签
该插件标签实际上会 解析 transmission 并 加载适当的硬件接口和控制器管理器。
具体参考:gazebo Tutorial: ROS Control
默认情况下,gazebo_ros_control插件非常简单,尽管它还可以通过其他插件体系结构进行扩展,以允许高级用户在ros_control和Gazebo之间创建自己的自定义机器人硬件接口。
gazebo_ros_control < plugin >有如下子标签:
- < robotNamespace > 标签用于的ros的命名空间 ,默认是 robot name
- < controlPeriod > 控制器的更新周期(对应源码的update函数 调用频率 后面再对应)
- 对应源码
- < robotParam > 默认是’/robot_description’
- < robotSimType > 重点 用户可以扩展的机器人仿真接口 可以自己做插件,然后在此地方加载。 默认是已经写好的 DefaultRobotHWSim
后面
先用默认方式控制下
再用自己写的插件控制
在文件中加入如下代码
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<robotNamespace>/swivel</robotNamespace>
<controlPeriod>0.01</controlPeriod>
<robotSimType>gazebo_ros_control/DefaultRobotHWSim</robotSimType>
</plugin>
</gazebo>
创建一个 .yaml配置文件(配置控制器)
控制器可以自己写,然后通过launch文件加载
也可以使用写好的控制器 直接写一个配置文件(.yaml)然后通过launch文件 将配置参数加载到参数服务器,在launch 文件里 启动控制器(controller_manager)该源码会根据参数加载对应的控制器(配置文件里的)。
swivel:
# Publish all joint states -----------------------------------
swiveljoint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
# Position Controllers ---------------------------------------
swiveljoint1_position_controller:
type: effort_controllers/JointPositionController
joint: swivel_J0
pid: {p: 100.0, i: 0.01, d: 10.0}
swiveljoint2_position_controller:
type: effort_controllers/JointPositionController
joint: swivel_J1
pid: {p: 100.0, i: 0.01, d: 10.0}
写launch启动文件
<launch>
<include file="$(find hector_gazebo_worlds)/launch/start.launch"/>
<param name="robot_description"
command="$(find xacro)/xacro.py '$(find swivel_description)/model/swivel_test.urdf.xacro'" />
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model rrbot -param robot_description"/>
<rosparam file="$(find swivel_description)/config/swivel_gimbal_control.yaml" command="load"/>
<node name="controller_spawner" pkg="controller_manager" type="spawner" respawn="false"
output="screen" ns="/swivel" args="swiveljoint_state_controller swiveljoint1_position_controller swiveljoint2_position_controller --shutdown-timeout 3"/>
launch>
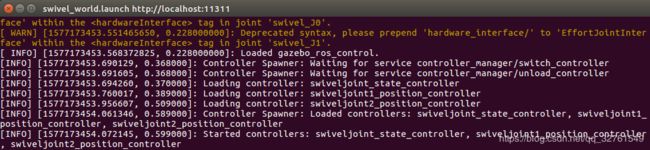
执行该launch文件
roslaunch swivel_world.launch
可以看到.yaml 里的控制器已经加载 并且启动了
发布控制命令
因为是调用ros里面写好的控制器,所以不需要知道源码里是怎么接收消息,然后怎么处理的。也不用纠结为什么要发布这个topic。因为源码接收的就是这个topic。。。
rostopic pub -1 /swivel/swiveljoint1_position_controller/command std_msgs/Float64 "data: 1.5"
然后会发现 竖轴转动了。已经成功控制了机器人的关节。
参考底下有rqt工具如何使用
可以发布topic
可以画曲线
探究怎么实现的
撸源码探究ros gazebo里的 硬件抽象构建
- ros里的控制器
写自己的插件实现控制
- 接下来要撸ros相关部分的源码了。探究是怎么实现的
- 然后是仿照源码写自己的插件 机器人接口插件 和 控制器插件