ROS Topic通信
Topic通信
参考链接:https://blog.csdn.net/github_39611196/article/details/82970668
注意:
package.xml修改如下
<build_depend>message_generation
#而不是
回到工作空间 执行catkin_make 命令


通常我们会把消息收发的两端分成两个节点来写,一个节点就是一个完整的C++程序。
消息发送节点 见topic_demo/src/talker.cpp
ros::Publisher pub = nh.advertise

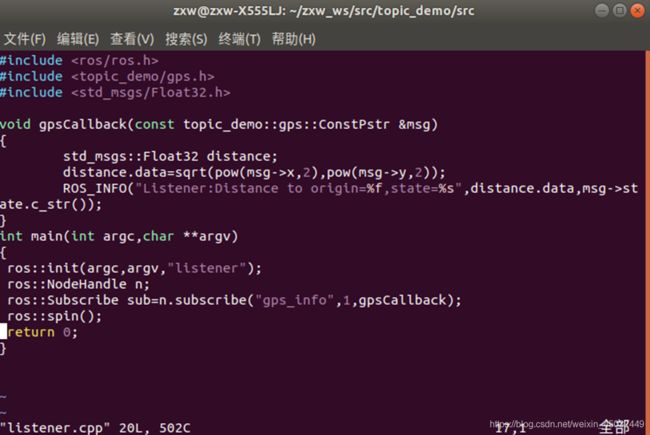
消息接收节点 见topic_demo/src/listener.cpp
然后在工作空间catkin_make一下
若出现fatal error: ros/ros.h: No such file or directory错误提示
在CMakeList_txt添加include_directories(include ${PCL_INCLUDE_DIRS})
最后应该是
include_directories(include ${catkin_INCLUDE_DIRS} ${PCL_INCLUDE_DIRS})

编译通过后
启动 talker listener 两个节点命令格式rosrun [package_name] [node_name]
在本工作空间中生成的可执行文件在zxw_ws/devel/lib/topic_demo下所以命令应为
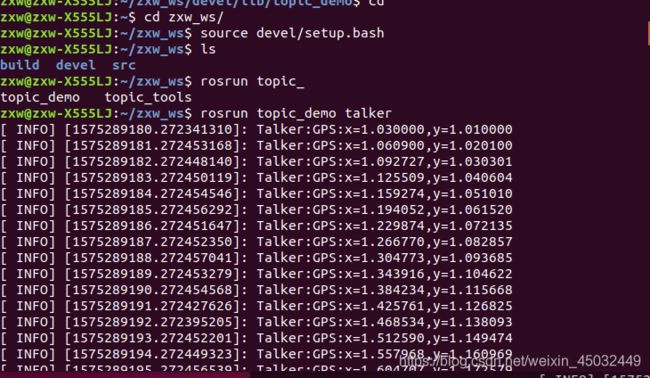
$rosrun topic_demo talker
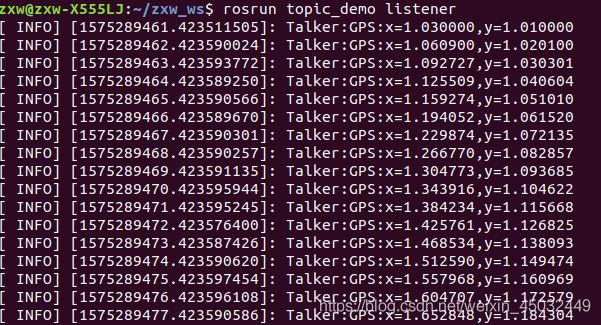
$rosrun topic_demo listener
在启动之前需要在工作空间source devel/setup.bash 作用是让ROS能够找到你想要执行的可执行文件
NodeHandle是Node的句柄,用来对当前节点进行各种操作。在ROS中,NodeHandle是一个定义好的类,通过include
NodeHandle常用成员函数包括:
//创建话题的publisher
ros::Publisher advertise(const string &topic, uint32_t queue_size, bool latch=false);
//第一个参数为发布话题的名称
//第二个是消息队列的最大长度,如果发布的消息超过这个长度而没有被接收,那么就的消息就会出队。通常设为一个较小的数即可。
//第三个参数是是否锁存。某些话题并不是会以某个频率发布,比如/map这个topic,只有在初次订阅或者地图更新这两种情况下,/map才会发布消息。这里就用到了锁存。
//创建话题的subscriber
ros::Subscriber subscribe(const string &topic, uint32_t queue_size, void(*)(M));
//第一个参数是订阅话题的名称
//第二个参数是订阅队列的长度,如果受到的消息都没来得及处理,那么新消息入队,就消息就会出队
//第三个参数是回调函数指针,指向回调函数来处理接收到的消息
//创建服务的server,提供服务
ros::ServiceServer advertiseService(const string &service, bool(*srv_func)(Mreq &, Mres &));
//第一个参数是service名称
//第二个参数是服务函数的指针,指向服务函数。指向的函数应该有两个参数,分别接受请求和响应。
//创建服务的client-
ros::ServiceClient serviceClient(const string &service_name, bool persistent=false);
//第一个函数式service名称
//第二个参数用于设置服务的连接是否持续,如果为true,client将会保持与远程主机的连接,这样后续的请求会快一些。通常我们设为flase
//查询某个参数的值
bool getParam(const string &key, std::string &s);
bool getParam (const std::string &key, double &d) const;
bool getParam (const std::string &key, int &i) const;
//从参数服务器上获取key对应的值,已重载了多个类型
//给参数赋值
void setParam (const std::string &key, const std::string &s) const;
void setParam (const std::string &key, const char *s) const;
void setParam (const std::string &key, int i) const;
//给key对应的val赋值,重载了多个类型的val