速腾聚创Robosense16线激光雷达SLAM建图(一)————Hector建图
因为最近拿到一个Robosense16线的激光雷达,这是一个三维的激光雷达,所以就拿着这个雷达把一些开源的经典的SLAM算法都跑了一遍,中间也遇到了一些问题,所以就打算在博客上记录下来,供大家交流参考,接下来的一系类文章就是如何配置激光雷达与SLAM算法的连接。今天咱们先讲第一个SLAM算法——Hector。
关于Robosense与Hector算法建图的博文有一篇很详细,详情请参考:https://blog.csdn.net/geerniya/article/details/84866429
由于这篇博文的作者写的很详细,我主要写下自己建图的步骤和一些资料的链接,如有不懂的问题可以参考上面的博文链接。下面咱们开始Hector建图之旅。
一、安装雷达的驱动
环境:Ubuntu16.04+ROS kinetic
购置速腾聚创Robosense16的激光雷达,厂家会赠送参考手册,这个给一个下载链接:
链接:https://pan.baidu.com/s/1cNIraLOLdMb8P5kssK9lJQ
提取码:3ag2
按照手册一步一步操作即可,这里不详细记录其过程了。里面有一个设置静态IP的步骤,这里有一个比较详细的配置静态IP的博文,请参考:https://www.cnblogs.com/dengyungao/p/8523348.html
注:因为我平时用WIFI上网,所以这样配置是没有冲突的,如果你的电脑有多个网口,用宽带上网的话,这个方法貌似会有问题,你需要重新参考一下其他的方法,如果你用WiFi,你跳过这个问题就行。
至此,雷达的驱动已安装完成,你可以在RVIZ查看雷达的点云数据了,效果还是非常好的。看来贵的雷达还是有道理的。╮(╯▽╰)╭
二、Hector建图
1、使用pointcloud_to_laserscan将3d的激光雷达数据转换为2d的激光雷达数据
由于速腾Robosense16线雷达是一个3维的激光雷达,而Hector是一个2d的SLAM算法,所以需要将3D的雷达转换为2D的雷达,将3d激光雷达转换成2d雷达,有两种方式:一种是只使用3d雷达中的一条扫描线,另一种是将多条扫描线合成一条2d雷达扫描线。使用pointcloud_to_laserscan包可以很方便地实现第二种办法,第二种方法因为使用了多条扫描线,因此可以输出更高质量的2d雷达数据。
使用pointcloud_to_laserscan包将3d的激光雷达数据转换为2d的雷达数据可以参考这篇博文,讲解的很详细,详见:https://blog.csdn.net/geerniya/article/details/84880514
如果你对pointcloud_to_laserscan包中的参数比较感兴趣,你可以去ros wiki的官网中参考pointcloud_to_laserscan的详细介绍。
2、使用Hector-slam建图
在上一步的操作中,我们已经成功的将3d的激光雷达数据转化为2d的激光雷达数据,这也是hector-slam所能接受的输入数据。因为我在这里稍微有所改动,与博文https://blog.csdn.net/geerniya/article/details/84882203有所不同,所以我就详细的记录下面这个过程的步骤。
hector-slam采用的是卡尔曼滤波的思想,建图的过程不需要里程计,所以我们可以手持激光雷达构建2d的平面地图。如果你对hector-slam的原理感兴趣你可以参考其他相关的博文。(这个我没有仔细的研究过,所以没有相关的链接分享 ̄□ ̄||)
1)、由于ROS的软件源中已经集成hector-slam的包,所以我们可以用二进制形式安装,即使用命令:
sudo apt-get install ros-kinetic-hetor-slam2)、建立hector-slam的启动文件
我们可以在 ~/catkin_ws/src/ros_rslidar/rslidar_pointcloud/launch中(这里是我激光雷达驱动文件的存放位置,你自己的根据实际情况来定)建立一个hector_slam_with_rslidar.launch,其具体的内容如下:
这个launch文件主要分为这几个部分:第一部分是启动Robosense激光雷达的启动文件;第二部分是启动pointcloud_to_laserscan节点,将激光雷达的三维数据转换为2d类型;第三部分是启动hector_mapping节点并配置相关参数;第四部分是发布静态tf变换,主要是base_link与laser、odom与base_link;第五部分是启动rviz界面。
其中比较重要的部分是hector_mapping节点参数配置和发布静态tf变换,如果这部分的关系没有理清是很容易出现错误的,现在我们就来讲讲这个部分,也是为以后的其他算法的构建做铺垫。在hector——mapping节点的frame配置中有这两个重要的参数
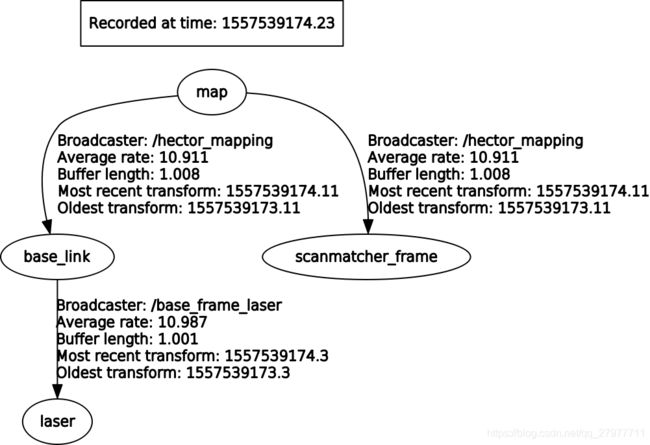
由于hector算法是不需要odom(里程计),所以这里的odom_frame我们可以将其设置为base_link,即不使用odom这个frame,然后在静态tf变换中我们可以去掉 这个静态发布
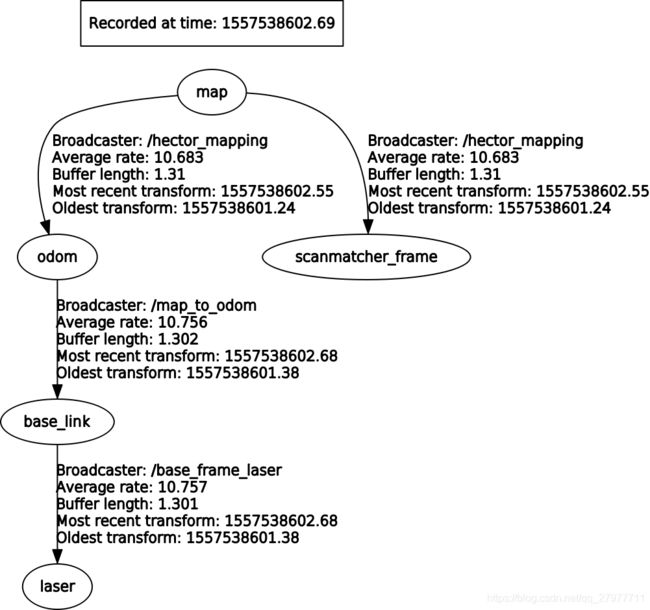
如果我们想保留odom,即 将odom_frame设为这时我们需要为其提供一个odom——base_link的变换,保留这个(*)这个静态变换,有兴趣的同学可以分别尝试一下。
下面贴上所讲的两种方法的tf树,以供参考:
这里还有一个问题需要注意的就是:
rostopic echo /scan至此,整个建图过程我们已经讲解的很清楚了,我第一建图的时候出现了以下的错误:
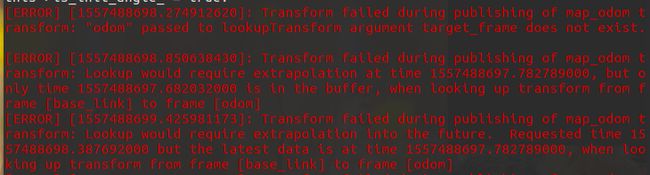
你也应该知道是什么原因导致的错误了。