- vrep初探
曾令城
机械C++学vrep
图为tx90导入vrep的示意图。标记1可以查看更改属性标记2是移动旋转视图,当然鼠标快捷键也可以,标记3标记4是移动和旋转,可以在添加关节时使用,用来确定关节的位置,标记5是导入的stl文件,双击可以重命名,标记6为开始仿真,标记7的乌龟和兔子可以减慢和加速仿真速度。1.导入模型由于tx90模型稍微复杂,本例主要从一个简单的小装配体说起,如下图所示:将该连杆模型导入V-REP中,基座几何模型如下
- vrep学习笔记8——将vrep中graph文件导出为csv.文件,并导入matlab中绘制曲线图
邸笠佘司
vrep人工智能
在机械臂仿真过程中,使用vrep中的graph图表功能绘制出的曲线不够清晰,如何将graph中的图表数据导出为csv文件,并使用matlab绘制出同样的曲线图呢?1.将vrep中的graph导出为csv文件首先选中graph如下选择file-export-selectedgraphsasCSV有的小伙伴说了,为什么点了export之后显示asCSV是灰色的,无法点呢,这是因为最开始第一步没有选中g
- Vrep仿真之画出运动轨迹
求知小菜鸟
机器人vrep仿真python
Vrep仿真之画出运动轨迹参考链接:Vrep/CoppeliaSim:画出运动轨迹此代码错误之处为添加x与graph的位置,原作者将graph移动到想要得到末端的下边,然后再画出位置与graph的轨迹,显得有点多余,不如不需要移动graph,直接画出想要点的运动轨迹。依然感谢原作者的详细标记借用参考链接作者图,并修改1.点击Add→Graph,将Graph加入场景中。2.添加数据。分别选择Obje
- vrep的bubbeRob仿真机器人制作教程
易卜利斯卡
VREP
1.构造基础模型添加bubbleRob的主体。点击Menubar-->Add-->Primititiveshape-->Sphere,添加一个球体(以下称为bubbleRob),并将X-size设置为0.2。设置bubbleRob的动态属性。双击bubbleRob,打开动态属性设置对话框,勾选Bodyisrespondable和Bodyisdynamic。bubbleRob将对外界的碰撞作出动作和
- CoppeliaSim(Vrep)动力学仿真入门设置
WHC763
vreplua
1-图表vrep4.2之后不能直接添加数据流,需要从脚本添加,或者修改配置文件,设置老版本界面,参考CoppeliaSim4.2(V-REP)添加3D轨迹_长安刘少的博客-CSDN博客2-实体包括碰撞实体和可视实体两部分,碰撞实体建议自行添加,降低计算量。可视实体可以采用sw导出的实体,可以采用sw导出urdf文件的形式,参考robot-sw导出urdf_WHC763的博客-CSDN博客实体需要设
- 机器人仿真之Vrep中Graph功能下的各种曲线问题汇总
邸笠佘司
vrep机械臂轨迹规划机器人
vrep,机器人仿真软件大佬,在仿真机械臂轨迹时涉及到末端轨迹的曲线等一系列问题,在不与matlab联合仿真的情况下如何使用vrep获得各种曲线?如何调取Graph表格功能中的各种曲线标题?
- 2022-4-21 vrep深度相机Kinect 远程c++(qtcreator) opencv 保存
HI_Forrest
学习笔记c++
从模型库里拉出来一个Kinect相机放在合适位置:设置好像素,不是标准像素值vrep有警告(可能数据有误),忽略即可同样的像素值,在c++端:intw=640,h=480;/*640,480*/simxIntresolution[2]={0,0};simxFloatmem[32]={0};simxFloat*point=mem;//simxFloat**depth1=&point;simxFloa
- VREP path planning (3) motion planning demo1
肥猫有梦想
第三篇,终于来到了激动人心的机械臂路径规划环节motionPlanningDemo1.ttt这个scene相比于前面两个就稍微复杂一点了,除了机械臂,障碍物,还多了approachDirectionObstacle,而且涉及到机械臂逆解和碰撞检测的相关内容,我在文章里会稍微介绍一下,但是最好还是先看一下UserManual里面Calculationmodules这一节首先看一下SceneHiera
- 下载安装coopeliasim
ulimate_
vrepvrep
Downloads-CoppeliaRobotics选择EDU版本先前的版本:PreviousversionsofCoppeliaSim-CoppeliaRoboticsCoppeliaSim版本指示如下:VersionX.Y.Z(rev.W)X确定一个特别版本(每隔几年一次)Y表示主要发布Z表示次要发布W标识修订号(0通常用于测试版,1用于第一个常规版本)下面是一些vrep版本更新的重要节点Co
- 在VREP的模型脚本中使用其他脚本的函数
小小快刀手
lua开发语言
VREP是一款用于机器人仿真的软件,最近博主也正在使用此款软件完成机器人工控课程设计。VREP使用的是Lua语言编程的,Lua语言是嵌入式语言,十分方便简单,有C/C++语言基础很容易上手。此次工控设计是关于youbot小车在迷宫中寻找随机生成的立方体,然后完成搬运与码垛。这里,我是用A*算法来实现youbot小车循迹的,由于A*算法比较复杂,而且代码比较多,如果直接在youbot脚本中定义描述这
- VREP/CoppeliaSim 界面字体过小问题的解决方法
eowyn0406
关于屏幕分辨率的重要说明:如果在高分辨率屏幕上发现文本和图形太小,则可以在Windows上执行以下步骤:1-右键单击CoppeliaSim应用程序exe(可能的位置:C:\ProgramFiles\CoppeliaRobotics\CoppeliaSimEdu),然后单击“属性”。2-在“兼容性”选项卡下3-单击“更改高DPI设置”4-选中“替代高DPI缩放行为”框5-缩放比例--选择“系统”您也
- 【OMPL.demo.1】二维点到点
HI_Forrest
学习笔记VREPmotionplanningc++动态规划
改写代码地址基于开学初用Windows下的vs2019的框架改了改,基本工程搭建过程见:vs2019+VREP基本工程框架借用vrep界面展示规划的路径,vrep主要是记录robot的轨迹,robot的位置由c++程序直接设置,vrep类的定义如下:vrep.h#pragmaonce#include"extApi.h"#include"simConst.h"#include"extApiPlatf
- YCB数据集的obj文件导入到Vrep/Coppeliasim中保存为.ttm文件
EdenGabriel
仿真器ubuntu
由于课题需要,接下来会使用vrep来搭建自己的env,今天第一次使用,在查阅了相关文献之后发现vrep的教程资源少得可怜。记录今天操作vrep时所遇到的一些问题。(由于第一天使用,还有很多不明白的地方,如果有错误的地方希望筒子们可以指出来,也希望多留一些vrep的学习教程,3q啦)一.vrep中导入obj文件左上方File->Import->Mesh选择YCB/models下的obj文件如图所示。
- Vrep/CoppeliaSim:画出运动轨迹
理闲
如果需要在Vrep仿真环境中,画出机械臂末端或其他物体的运动轨迹,如下图:以显示baxter机械臂末端轨迹为例,可以按照以下步骤操作:1.点击Add→Graph,将Graph加入场景中。2.将Graph放到机械臂末端的目录下。3.将Graph的位置移到机械臂末端,快速移动方法可以参照我的博文:Vrep/CoppeliaSim:常用小技巧和常见问题解答中的“将一个物体快速移动到另一个物体的位置上”。
- Vrep的matlab接口
01零一
机器人
目前来说,V-REP是一个比较小众的仿真工具,尽管它功能非常强大。目前唯一的技术支持就是V-REP官方论坛。V-REP提供的技术手册可以解决大部分问题,功能细节介绍也非常详细。Matlab环境准备Step1:在matlab工作目录新建matlab项目文件夹VrepApiStep2:对应于Windows系统,你只需要准备三个文件。使用python、c++的配置大同小异,可参考官方文档。remoteA
- MATLAB与VERP/Coppeliasim联合仿真:配置ZeroMQremote API
Sun_Y_H
matlab开发语言luagithub
网上查找MATALB与VREP联合仿真的配置和例程都是基于传统API的连接,传统API的连接方式,配置简单,但是此连接方式可使用的vrep中API函数的是有限的,有很多函数在MATLAb中无法调用。阅读VREP/Coppeliasim的API相关文档,发现可以通过ZeroMQ远程API进行与MATLAB联合仿真。ZeroMQ远程API的连接方式,配置稍微麻烦,但是运用灵活,其连接方式是在MATLA
- vrep和matlab,使用Matlab与V-REP联合仿真 - Play V-REP with Matlab
alvarocfc
vrep和matlab
OS:Win10x64Matlab:R2016bV-REP:V-REPPROEDUv3.5.0下载、安装与支持V-REP操作基础V-REP仿真基础Matlab环境准备一个简单的例子对V-REP有一定了解的读者可以直接跳到第三节Matlab环境准备。下载、安装与支持V-REP提供Windows、Linux和MacOS三个平台的应用程序支持,任意平台都提供教育版和专业版两个版本。教育版是免费的,因此后
- CoppeliaSim(原Vrep)中实现多关节机械臂的正运动学仿真【CoppeliaSim与matlab共享内存通信实现】
魚香肉丝盖饭
Vrep仿真机器人学开发语言vrep仿真matlab联合仿真
matlab通信实现本章在[动力学建模]和[vrep与matlab建立通信]完成的前提下进行传送门:【CoppeliaSim】(原V-rep)模型文件导入及动力学建模【CoppeliaSim】(原Vrep)与matlab建立通信本篇文章用vrep的matlab接口实现了在CoppeliaSim中和下面文章同样的仿真功能CoppeliaSim(原Vrep)中实现多关节机械臂的正运动学仿真【Coppe
- Matlab+Vrep 激光雷达2D动态建图
我太不严肃了
Matlab+Vrep仿真激光雷达2D建图Matlab+Vrep仿真激光雷达2D建图写在前面最终效果视频项目Github带有RemoteApi的工程创建带有RemoteApi的Matlab工程创建带有RemoteApi的python工程创建使用remoteApi与Vrep连接起来工程代码细节Vrep工程脚本Matlab工程代码细节python工程代码细节Matlab+Vrep仿真激光雷达2D建图写
- 【VREP】Coppeliasim与Matlab Simulink联调配置
LANLANLAN_hust
VREP仿真matlab开发语言
前言平时使用simulink来构建模型非常方便,许多人会使用simulink,如果需要仿真来实际观察,可以配合coppeliasim来,但由于官方未给出方便的simulink与其的库,在此非常感谢Santiago博士提供的工具simExtSimulin库,这里使用该库完成配置与示例的搭建1.下载simExtSimulin,QT以及VS2019(1)下载库simExtsimulinkhttps://
- 【matlab】vrep小车与matlab通信并模拟
爱吃面的程序员
matlabmatlablua模拟gui
前几天刚刚做了一个vrep小车仿真轨迹模拟的gui【matlab】vrep小车轨迹gui注意到,之前的文章,是利用matlab给小车发送位置,然后小车移动的,如果现在我们需要使用键盘控制小车移动呢?下面这个demo中,使用键盘控制小车移动,键盘W键向上移动,键盘D键向右,A键向左在分析小车运动时,一个很重要的参数就是小车的三个轮子的运动速度,而小车的轮子属于joint类型[查找文档](Enabli
- 【CoppeliaSim】(原Vrep)与matlab建立通信
魚香肉丝盖饭
Vrep仿真matlab笔记matlab缓存
创建一个vrep与matlab通信的matlab工作文件夹打开C:\ProgramFiles(x86)\V-REP3\V-REP_PRO_EDU\programming\remoteApiBindings\lib\lib,根据你的系统选择合适的文件夹,将下面的remoteApi.dll文件拷贝到你的matlab工作路径中;然后打开C:\ProgramFiles(x86)\V-REP3\V-REP_
- VREP path planning (2) 6DoFHolonomicPathPlanning 六自由度 路径规划 仿真
肥猫有梦想
6DoFHolonomicPathPlanning.ttt这个scene更简单,从hierarchy里可以看到,一目了然,而且直接抛弃了可视化路径,用的函数和上一篇基本上一样,就是升级到了三维空间,不再是平面的。直接看下代码:functionsysCall_threadmain()robotHandle=sim.getObjectHandle('Start')targetHandle=sim.ge
- gazebo安装_【ROS 学习笔记】Gazebo
琦心
gazebo安装
0.简介官网镇楼:Gazebogazebosim.orgGazebo同我们常用的vrep,adams一样,都是内置物理引擎(PhysicsEngine)的动力学仿真软件,只不过ROS直接集成了Gazebo,像其他开源软件(OpenCV,OMPL)一样。Bytheway,vrep也是提供了ros接口的,不过我一般用内置的lua脚本、外部的python、甚至matlab来实现vrep仿真。先看下gaz
- 虚拟机器人平台CoppeliaSim(Vrep)的逆运动学教学
拖出去喂猪
强化学习vrep强化学习
相信看这篇博客的人都知道CoppeliaSim是做什么的,因此这里不多赘述。CoppeliaSim从最早的Vrep到现在已经更新了N个版本,从过去Vrep3.x开始使用的我这里小小地吐槽一下这个软件。CoppeliaSim每一个版本都有更新,问题是这些更新有时候不能向前兼容,而且时不时更新地让人不知所措(对于有紧急任务的时候真的很火大啊)。以本文所展示地逆运动学来说,CoppeliaSim在4.0
- 将YCB模型库中的obj格式文件导入VREP并保存为ttm文件
记忆力衰退来写博客的李同学
ros学习机器人机器人仿真软件
之前在Gazebo里做了个机械臂抓取的仿真环境,最近开始和其他小伙伴们一起学习,大家统一都用VREP了,VREP支持导入urdf,但是不知道为什么写好的urdf导入后模型的颜色都没了,另外考虑到导入模型后为了进行碰撞检测的计算,还是需要手动把模型简化不能直接用原来复杂的mesh文件,所以打算一个一个手动的把YCB数据集里的模型都导入进来然后调整好模型,存成ttm方便以后用。一、下载YCB模型网址在
- Vrep学习笔记(一)
catog
本文转载自知乎:AI与机器人一、用代码控制YouBot机器人1.1YouBot机器人模型YouBot机器人包括底盘和机械臂。底盘带有四个麦轮,麦轮分为A轮和B轮,可以前后左右移动。机械臂有5个旋转关节和相应的连杆机构串联组成,末端装有夹持机构。每个关节可以进行单独的控制。在Vrep中已经构建好了基本的关节模型和运动控制接口,只需要调用响应的控制接口来控制各个关节就行了。1.2Vrep中基本的代码框
- vrep关节类型和运行
weixin_45650561
vrep
vrep关节类型和运行1、vrep关节种类2、vrep关节模式(1)、passivemode(被动模式)(2)、inversekinematicsmode(逆运动学模式)(3)、dependentmode(依赖模式)(4)、torqueorforcemode(扭矩或力模式)1)thejointmotorisdisabled2)thejoint'smotorisenabled,butthecontr
- CoppeliaSim+matlab+simulink七轴机械臂仿真
小小蜗牛,大大梦想
matlab开发语言矩阵
源代码地址:GitHub-xiaowan1117/vrep-matlab-simulinkGitHub-xiaowan1117/vrep-matlab-simulink:七轴机械臂的仿真七轴机械臂的仿真.Contributetoxiaowan1117/vrep-matlab-simulinkdevelopmentbycreatinganaccountonGitHub.https://github.
- V-REP(Cooprliesim EDU)自学笔记 实现UR5机械臂末端按轨迹移动
多吃蔬菜身体好
python
目录1、1Introduction&Download1.2Vrep/CoppeliaSim基础操作1.3CoppeliaSim与python的连接1.4CoppeliaSim与matlab的连接2.1基于V-rep的UR5末端控制2.2基于V-rep-python的UR5末端控制1、1Introduction&DownloadV-rep是一个跨平台的机器人仿真软件,在windows和Linux下都
- 对于规范和实现,你会混淆吗?
yangshangchuan
HotSpot
昨晚和朋友聊天,喝了点咖啡,由于我经常喝茶,很长时间没喝咖啡了,所以失眠了,于是起床读JVM规范,读完后在朋友圈发了一条信息:
JVM Run-Time Data Areas:The Java Virtual Machine defines various run-time data areas that are used during execution of a program. So
- android 网络
百合不是茶
网络
android的网络编程和java的一样没什么好分析的都是一些死的照着写就可以了,所以记录下来 方便查找 , 服务器使用的是TomCat
服务器代码; servlet的使用需要在xml中注册
package servlet;
import java.io.IOException;
import java.util.Arr
- [读书笔记]读法拉第传
comsci
读书笔记
1831年的时候,一年可以赚到1000英镑的人..应该很少的...
要成为一个科学家,没有足够的资金支持,很多实验都无法完成
但是当钱赚够了以后....就不能够一直在商业和市场中徘徊......
- 随机数的产生
沐刃青蛟
随机数
c++中阐述随机数的方法有两种:
一是产生假随机数(不管操作多少次,所产生的数都不会改变)
这类随机数是使用了默认的种子值产生的,所以每次都是一样的。
//默认种子
for (int i = 0; i < 5; i++)
{
cout<<
- PHP检测函数所在的文件名
IT独行者
PHP函数
很简单的功能,用到PHP中的反射机制,具体使用的是ReflectionFunction类,可以获取指定函数所在PHP脚本中的具体位置。 创建引用脚本。
代码:
[php]
view plain
copy
// Filename: functions.php
<?php&nbs
- 银行各系统功能简介
文强chu
金融
银行各系统功能简介 业务系统 核心业务系统 业务功能包括:总账管理、卡系统管理、客户信息管理、额度控管、存款、贷款、资金业务、国际结算、支付结算、对外接口等 清分清算系统 以清算日期为准,将账务类交易、非账务类交易的手续费、代理费、网络服务费等相关费用,按费用类型计算应收、应付金额,经过清算人员确认后上送核心系统完成结算的过程 国际结算系
- Python学习1(pip django 安装以及第一个project)
小桔子
pythondjangopip
最近开始学习python,要安装个pip的工具。听说这个工具很强大,安装了它,在安装第三方工具的话so easy!然后也下载了,按照别人给的教程开始安装,奶奶的怎么也安装不上!
第一步:官方下载pip-1.5.6.tar.gz, https://pypi.python.org/pypi/pip easy!
第二部:解压这个压缩文件,会看到一个setup.p
- php 数组
aichenglong
PHP排序数组循环多维数组
1 php中的创建数组
$product = array('tires','oil','spark');//array()实际上是语言结构而不 是函数
2 如果需要创建一个升序的排列的数字保存在一个数组中,可以使用range()函数来自动创建数组
$numbers=range(1,10)//1 2 3 4 5 6 7 8 9 10
$numbers=range(1,10,
- 安装python2.7
AILIKES
python
安装python2.7
1、下载可从 http://www.python.org/进行下载#wget https://www.python.org/ftp/python/2.7.10/Python-2.7.10.tgz
2、复制解压
#mkdir -p /opt/usr/python
#cp /opt/soft/Python-2
- java异常的处理探讨
百合不是茶
JAVA异常
//java异常
/*
1,了解java 中的异常处理机制,有三种操作
a,声明异常
b,抛出异常
c,捕获异常
2,学会使用try-catch-finally来处理异常
3,学会如何声明异常和抛出异常
4,学会创建自己的异常
*/
//2,学会使用try-catch-finally来处理异常
- getElementsByName实例
bijian1013
element
实例1:
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd">
<html xmlns="http://www.w3.org/1999/x
- 探索JUnit4扩展:Runner
bijian1013
java单元测试JUnit
参加敏捷培训时,教练提到Junit4的Runner和Rule,于是特上网查一下,发现很多都讲的太理论,或者是举的例子实在是太牵强。多搜索了几下,搜索到两篇我觉得写的非常好的文章。
文章地址:http://www.blogjava.net/jiangshachina/archive/20
- [MongoDB学习笔记二]MongoDB副本集
bit1129
mongodb
1. 副本集的特性
1)一台主服务器(Primary),多台从服务器(Secondary)
2)Primary挂了之后,从服务器自动完成从它们之中选举一台服务器作为主服务器,继续工作,这就解决了单点故障,因此,在这种情况下,MongoDB集群能够继续工作
3)挂了的主服务器恢复到集群中只能以Secondary服务器的角色加入进来
2
- 【Spark八十一】Hive in the spark assembly
bit1129
assembly
Spark SQL supports most commonly used features of HiveQL. However, different HiveQL statements are executed in different manners:
1. DDL statements (e.g. CREATE TABLE, DROP TABLE, etc.)
- Nginx问题定位之监控进程异常退出
ronin47
nginx在运行过程中是否稳定,是否有异常退出过?这里总结几项平时会用到的小技巧。
1. 在error.log中查看是否有signal项,如果有,看看signal是多少。
比如,这是一个异常退出的情况:
$grep signal error.log
2012/12/24 16:39:56 [alert] 13661#0: worker process 13666 exited on s
- No grammar constraints (DTD or XML schema).....两种解决方法
byalias
xml
方法一:常用方法 关闭XML验证
工具栏:windows => preferences => xml => xml files => validation => Indicate when no grammar is specified:选择Ignore即可。
方法二:(个人推荐)
添加 内容如下
<?xml version=
- Netty源码学习-DefaultChannelPipeline
bylijinnan
netty
package com.ljn.channel;
/**
* ChannelPipeline采用的是Intercepting Filter 模式
* 但由于用到两个双向链表和内部类,这个模式看起来不是那么明显,需要仔细查看调用过程才发现
*
* 下面对ChannelPipeline作一个模拟,只模拟关键代码:
*/
public class Pipeline {
- MYSQL数据库常用备份及恢复语句
chicony
mysql
备份MySQL数据库的命令,可以加选不同的参数选项来实现不同格式的要求。
mysqldump -h主机 -u用户名 -p密码 数据库名 > 文件
备份MySQL数据库为带删除表的格式,能够让该备份覆盖已有数据库而不需要手动删除原有数据库。
mysqldump -–add-drop-table -uusername -ppassword databasename > ba
- 小白谈谈云计算--基于Google三大论文
CrazyMizzz
Google云计算GFS
之前在没有接触到云计算之前,只是对云计算有一点点模糊的概念,觉得这是一个很高大上的东西,似乎离我们大一的还很远。后来有机会上了一节云计算的普及课程吧,并且在之前的一周里拜读了谷歌三大论文。不敢说理解,至少囫囵吞枣啃下了一大堆看不明白的理论。现在就简单聊聊我对于云计算的了解。
我先说说GFS
&n
- hadoop 平衡空间设置方法
daizj
hadoopbalancer
在hdfs-site.xml中增加设置balance的带宽,默认只有1M:
<property>
<name>dfs.balance.bandwidthPerSec</name>
<value>10485760</value>
<description&g
- Eclipse程序员要掌握的常用快捷键
dcj3sjt126com
编程
判断一个人的编程水平,就看他用键盘多,还是鼠标多。用键盘一是为了输入代码(当然了,也包括注释),再有就是熟练使用快捷键。 曾有人在豆瓣评
《卓有成效的程序员》:“人有多大懒,才有多大闲”。之前我整理了一个
程序员图书列表,目的也就是通过读书,让程序员变懒。 程序员作为特殊的群体,有的人可以这么懒,懒到事情都交给机器去做,而有的人又可以那么勤奋,每天都孜孜不倦得
- Android学习之路
dcj3sjt126com
Android学习
转自:http://blog.csdn.net/ryantang03/article/details/6901459
以前有J2EE基础,接触JAVA也有两三年的时间了,上手Android并不困难,思维上稍微转变一下就可以很快适应。以前做的都是WEB项目,现今体验移动终端项目,让我越来越觉得移动互联网应用是未来的主宰。
下面说说我学习Android的感受,我学Android首先是看MARS的视
- java 遍历Map的四种方法
eksliang
javaHashMapjava 遍历Map的四种方法
转载请出自出处:
http://eksliang.iteye.com/blog/2059996
package com.ickes;
import java.util.HashMap;
import java.util.Iterator;
import java.util.Map;
import java.util.Map.Entry;
/**
* 遍历Map的四种方式
- 【精典】数据库相关相关
gengzg
数据库
package C3P0;
import java.sql.Connection;
import java.sql.SQLException;
import java.beans.PropertyVetoException;
import com.mchange.v2.c3p0.ComboPooledDataSource;
public class DBPool{
- 自动补全
huyana_town
自动补全
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd"><html xmlns="http://www.w3.org/1999/xhtml&quo
- jquery在线预览PDF文件,打开PDF文件
天梯梦
jquery
最主要的是使用到了一个jquery的插件jquery.media.js,使用这个插件就很容易实现了。
核心代码
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.
- ViewPager刷新单个页面的方法
lovelease
androidviewpagertag刷新
使用ViewPager做滑动切换图片的效果时,如果图片是从网络下载的,那么再子线程中下载完图片时我们会使用handler通知UI线程,然后UI线程就可以调用mViewPager.getAdapter().notifyDataSetChanged()进行页面的刷新,但是viewpager不同于listview,你会发现单纯的调用notifyDataSetChanged()并不能刷新页面
- 利用按位取反(~)从复合枚举值里清除枚举值
草料场
enum
以 C# 中的 System.Drawing.FontStyle 为例。
如果需要同时有多种效果,
如:“粗体”和“下划线”的效果,可以用按位或(|)
FontStyle style = FontStyle.Bold | FontStyle.Underline;
如果需要去除 style 里的某一种效果,
- Linux系统新手学习的11点建议
刘星宇
编程工作linux脚本
随着Linux应用的扩展许多朋友开始接触Linux,根据学习Windwos的经验往往有一些茫然的感觉:不知从何处开始学起。这里介绍学习Linux的一些建议。
一、从基础开始:常常有些朋友在Linux论坛问一些问题,不过,其中大多数的问题都是很基础的。例如:为什么我使用一个命令的时候,系统告诉我找不到该目录,我要如何限制使用者的权限等问题,这些问题其实都不是很难的,只要了解了 Linu
- hibernate dao层应用之HibernateDaoSupport二次封装
wangzhezichuan
DAOHibernate
/**
* <p>方法描述:sql语句查询 返回List<Class> </p>
* <p>方法备注: Class 只能是自定义类 </p>
* @param calzz
* @param sql
* @return
* <p>创建人:王川</p>
* <p>创建时间:Jul


























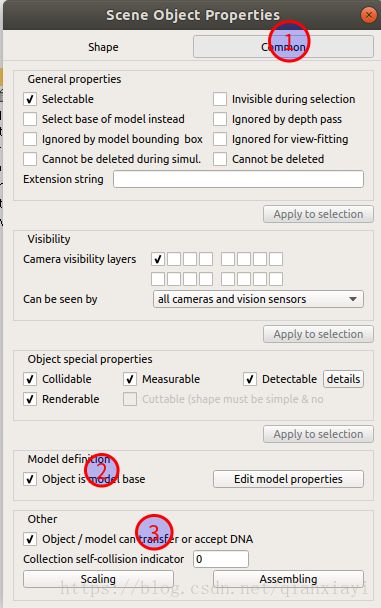

 为了隐藏在转动轴和连接器这些小零件,可以两个转动轴和连接器的camera visibility layer勾选第10层,取消第2层。默认情况下第9-16层是不显示的,因此设置之后它们会在场景中隐藏起来。
为了隐藏在转动轴和连接器这些小零件,可以两个转动轴和连接器的camera visibility layer勾选第10层,取消第2层。默认情况下第9-16层是不显示的,因此设置之后它们会在场景中隐藏起来。
 为了单击小零件时,自动选中bubbleRob主体,将两个轮子、滑块、传感器和绘图对象勾选上Select base of model instead。如果确实想只选中小零件,可以按住Ctrl+Shift,再点击小零件。也可以在左侧列表中选中。
为了单击小零件时,自动选中bubbleRob主体,将两个轮子、滑块、传感器和绘图对象勾选上Select base of model instead。如果确实想只选中小零件,可以按住Ctrl+Shift,再点击小零件。也可以在左侧列表中选中。

