cartographer源码浅析(一)-新鲜出炉
cartographer_ros
入口文件:node_main.cc
入口函数main,如下图:
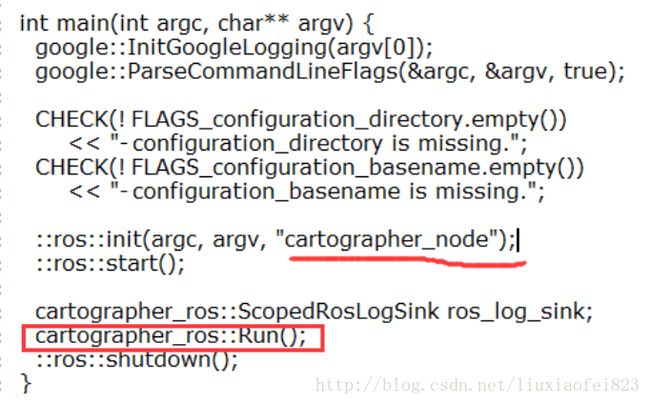
初始化节点:cartographer_node;
Run函数加载配置文件LoadOptions();根据配置文件处理所订阅的Topic。例如IMU


注意cartographer是否接受imu数据,取决于if判断的条件,这些条件是在“backpack_2d.lua”中所配置的。接着会交给HandleImuMessage函数(定义在sensor_bridge.cc中)处理,如下图:
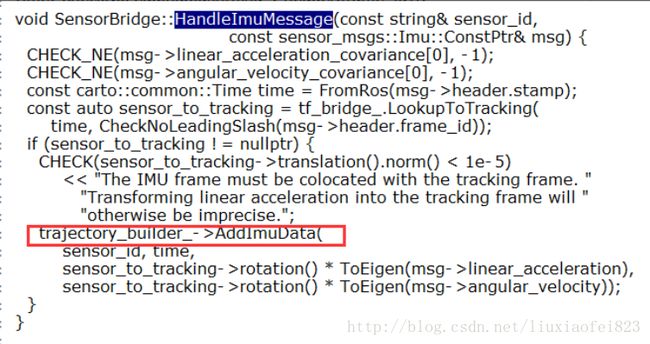
函数中会对frame_id作一个简单check,然后交给函数trajectory_builder_->AddImuData处理(在trajectory_builder.h中直接实现了),如下图:

而AddSensorData又是一个纯虚函数,它是在继承该父类的子类中去实现的,如下图:

通过搜索知道这个继承关系:class CollatedTrajectoryBuilder : public TrajectoryBuilder

在这个里面实现了。
而 sensor_collator_->AddSensorData中, sensor::Collator sensor_collator_;在map_builder.h中定义了。继而找到在collator.cc中找到了实现,如下图:

这里就会把IMU数据加入队列啦。std::unique_ptr是标准库的智能指针,

注意到在collator.h中一个函数:
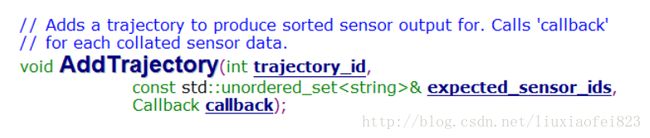
实现如下:

它在CollatedTrajectoryBuilder的构造函数中调用了,传入的回调函数名为HandleCollatedSensorData,处理整理后的传感器数据,到这里就开始进入关键正题啦!
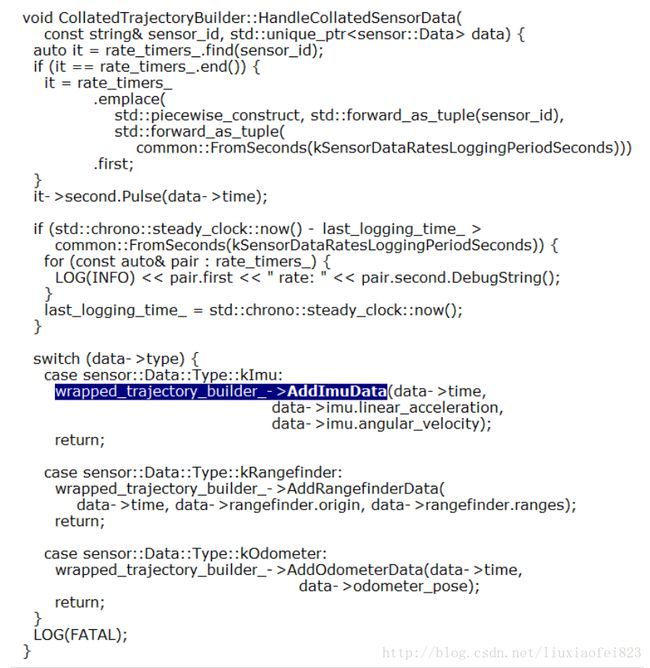
这个函数会把sensor data的rate获取打印出来,同时对数据类型进行区分处理。继续拿imu数据进行跟踪。wrapped_trajectory_builder_->AddImuData,该类型是:

在头文件cartographer/mapping_2d/local_trajectory_builder.h中,知道GlobalTrajectoryBuilder类继承了GlobalTrajectoryBuilderInterface类,如图:
自然就能找到GlobalTrajectoryBuilder::AddImuData的具体实现了,如下图:
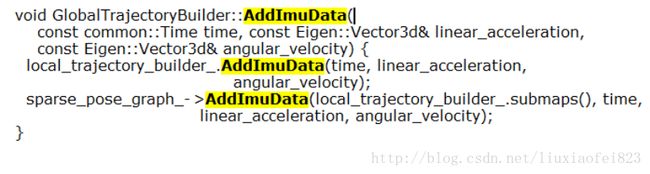
这个函数就意味着地图构建从全局优化转到本地局部优化上来了。
第一步:
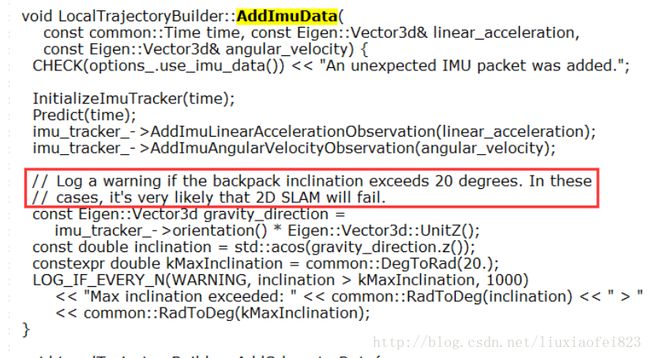
上面这个函数卡尔曼滤波根据时间预测pose,不断更新imu数据,设置最大倾斜角阈值20度,超过则2D SLAM will fail。
第二步:图优化

OptimizationProblem类是实现SPA(统计过程调整)闭环方法的。
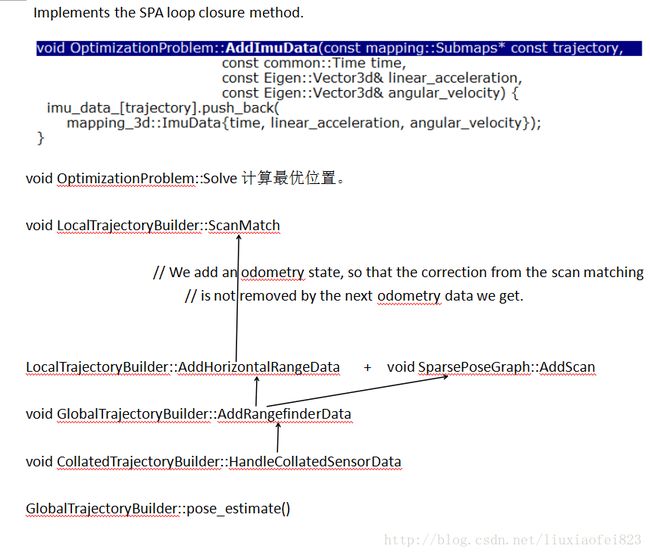
上面这几个就是很关键的函数,之后再具体分析。
网上相关文章链接:
http://mp.weixin.qq.com/s/LdbFp-Zvkr02-_25ILb16g
http://blog.csdn.net/u010566411/article/category/6467677
http://www.cnblogs.com/wenhust/tag/SLAM/(强烈推荐)
http://blog.csdn.net/zyh821351004/article/details/52421005
http://blog.csdn.net/jsgaobiao/article/details/53116042
http://blog.csdn.net/roadseek_zw/article/details/53316177
论文:
Improved Techniques for Grid Mapping with Rao-Blackwellized Particle Filters
博客:
http://blog.csdn.net/heyijia0327/article/details/40899819 pf原理讲解
http://blog.csdn.net/u010545732/article/details/17462941 pf代码实现
http://www.cnblogs.com/yhlx125/p/5634128.html gmapping分析
http://wenku.baidu.com/view/3a67461550e2524de4187e4d.html?from=search gmapping 分析
其他 :
http://ishare.iask.sina.com.cn/f/24615049.html