【VIO笔记(学习VINS的必备基础)】第六讲 视觉前端
文章目录
- 前端工作的综述
- 特征点提取、匹配和光流
- 为什么需要角点
- 角点的提取
- 光流的计算
- 光流的总结
- 关键帧与三角化
- 关键帧
- 三角化
- 三角化程序实现
系列教程来自某学院,侵权删除。
学习完这一系列课程再去看VINS才能做到不吃力,不然直接撸网上的各种VINS解析完全云里雾里-_-!
前端工作的综述
通常的 SLAM 框架由前后端共同构成,前端:提取特征点,追踪相机 Pose,定位相机;后端:提供全局优化或滑动窗口优化。
前端对于SLAM的最终追踪效果的贡献比较大,而后端虽然有很多种做法,例如基于滤波、滑动窗口等等,但是只要后端的实现是对的,对于最后的效果影响却不大。
对于一个好的前端,我们希望它:
• 追踪效果好,不容易丢
• 计算速度快
• 累计误差小
下面这张图给出了各种主流VO之间的一个对比:
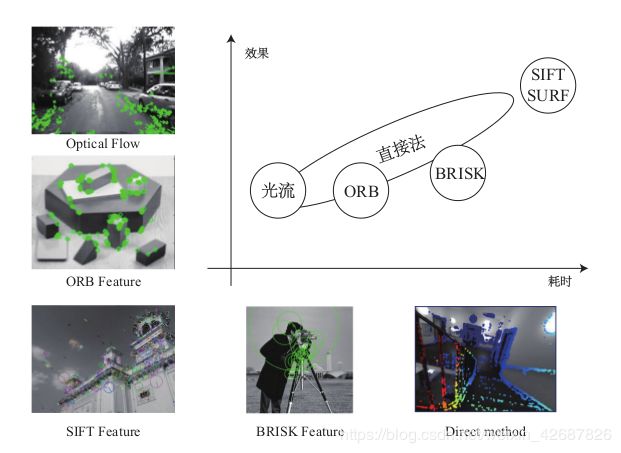
可以看到耗时和效果整体上是成正比的,所以当计算量足够时当然使用SIFT这样的方法,然而在实时的场景中,目前SIFT提取一次特征点需要200ms左右,无法使用。而ORB在10-15ms,然而效果较差,直接法则是一个跨度较大的方法,课上高博说直接法在实际运用时比特征点法是要效果更好的,特征点法经常会面临特征缺失的情况,例如上图中很多有天空的场景,特征点是很少的,两边的物体也很难做匹配,比如杂草等。
下面列出了一些结论:
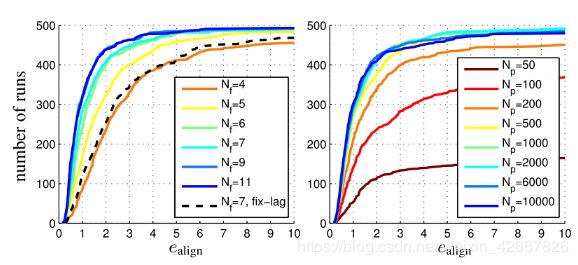
这是光流和特征点法的结论,在角点比较好的情况下,使用FAST+光流/GFTT+光流是比较实用的方法,而直接法则不太依赖于角点,但实现效果根据选点数量变化较大,下图是DSO论文中的内容,曲线越靠左上侧越好。在点数达到500以上的时候,效果的提示就不太明显了,可以看到黄色的线下方的其他线每加一个点数,就会有很大的提升。
特征点提取、匹配和光流
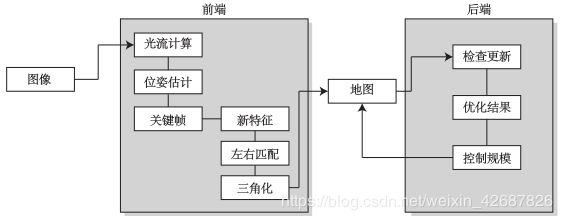
接下来介绍了一个光流方案的前端,下图是一个传统的双目光流的系统框图,单目的系统把左右匹配那一块修改成前后匹配就行了,其他部分也相同。
为什么需要角点
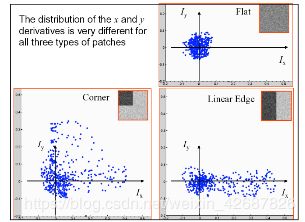
之前也提到光流法对角点比较依赖,这是为什么呢?下面这个例子做了很好的说明:
当我们选取了角点时,很容易辨认出下一张图中第二个绿色框是和上一帧匹配的,而当我们没有选取角点而是选取了一块空白的区域,就很难进行判断。那么这里提一下,如果没有提到角点,而是提到了一个边,例如左边是白色右边是黑色的部位怎么办?这时是可以使用直接法来进行位姿估计的,直接法是先利用一部分点计算出大概的变换矩阵,之后再通过对应的特征点来进行调整。
角点的提取
那么如果要使用光流,那就要确定提取到的是不是角点,下面介绍几种方法:
-
Harris角点
利用角点附近块的两个特征值大小,可以判断该区是否为角点。

-
FAST/GFTT 角点
GFTT是在 Harris 基础改进:Shi-tomasi 分数,增加固定选点数,等等
FAST则是只要点周围的连续N个点的灰度低于该点则认为它是角点,选取9点的就叫FAST-9。
FAST的速度最快,在1ms以内。GFTT则在10ms左右。
光流的计算
光流可以追踪一个时刻的角点在下个时刻的图像位置。
基于灰度不变假设:
![]()
对上式进行一阶泰勒展开:

由于两项相等可以消去,最后得到:
我们所求的就是 d x d t \frac{dx}{dt} dtdx和 d y d t \frac{dy}{dt} dtdy,那么这就是一个二元一次方程,无法通过一个式子求解,所以我们再假设在一个窗口内所有像素的运动是一样的,这样就获得一个超定的方程组,对其使用最小二乘求解即可求得u和v。
针对一些场景下灰度不变假设并不成立,这里介绍一种带warp的光流:

如下图这个车不断的在变化,那么我们在直接加的基础上使用一个仿射变换:
![]()

其中 p 1 − p 6 为 W 的参数,需要在线估计。
同时还可以给光流加上一个金字塔:

在图片中物体运动较快时,两帧之间的位移就会很大,这样就会使得前面的假设不满足,从而出现误差,这样我们就希望它能够运动的慢一点,通过缩小像素的尺寸就可以做到这一点,具体的原理可以参考:总结:光流–LK光流–基于金字塔分层的LK光流–中值流
光流的总结
在SLAM中,光流可以追踪上一帧的角点,并一直追踪该角点,直到超出图像范围或被遮挡,在单目 SLAM 中,新提出的角点没有 3D 信息,因此可通过追踪角点在各图像位置,进行三角化。
然而光流在SLAM中也存在局限性:
1 容易受光照变化影响
2 只适合连续图像中的短距离追踪,不适合更长距离
3 图像外观发生明显变化时不适用(例:远处的角点凑近看之后不为角点了)
4 对角点强依赖,对 Edge 类型点表现较差
5 稀疏光流不约束各点光流的方向统一,可能出现一些 outlier。
关键帧与三角化
在第五讲中已经有提到,我们的滑动窗口不能每一帧图像都进行一样的更新和边缘化的操作,这样的话如果相机处在静止状态,会导致滑动窗口中的图像在一段时间后全是相同的图像,导致估计效果变差。按照上一讲VINS的策略,我们在到来的时候第二新的帧是关键帧时marg掉最老的一帧,否则丢弃视觉信息只进行IMU的更新,这样在静止的时候也能够保持良好的性能。
关键帧
那么如何挑选出关键帧呢?
- 关键帧之间不必太近(退化或三角化问题)
太近导致的问题和静止其实类似,会导致整个图的顶点离得过近。 - 关键帧之间不能太远(共视点太少)
太远会导致共视点太少,使得在零空间中会发生新的移动,因为没有共视点就无法进行两者间位姿的估计。 - VIO 中,定期选择关键帧(假设 b g b_g bg , b a b_a ba 在关键帧期间不变)
结论:对于非关键帧,只执行前端算法,不参与后端优化,因此,对于非关键帧,它的误差会逐渐累积。直到该帧被作为关键帧插入后端,BA 才会保证窗口内的一致性,所以在计算量允许范围内,且不引起退化时,应尽可能多地插入关键帧。
三角化
在单目SLAM中,通常在插入关键帧时计算新路标点的三角化,下面先介绍三角化的原理:
考虑某路标点 y 在若干个关键帧 k = 1, · · · , n 中看到。则有:
![]()
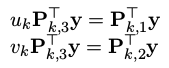
其中 λ k \lambda_k λk是路标点的深度, x k = [ u k v k 1 ] T x_k=\begin{bmatrix} u_k & v_k & 1 \end{bmatrix}^T xk=[ukvk1]T,Pk是投影矩阵,y则是我们要求的路标点坐标,用齐次坐标表示。这个式子的第三行可表示为:
![]()
将它带入前两行:
每次观测都会获得这样的一组方程,当有多次相机观测到这个路标点时,可以得到:
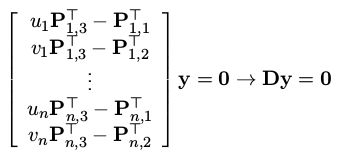
之后使用最小二乘的方法即可获得y的估计值:
![]()
这里先给出结论: D y = 0 Dy=0 Dy=0的最优解y等于 D T D \mathbf D^T\mathbf D DTD的最小奇异值对应的奇异值向量,也就是 y = u 4 y=u_4 y=u4
这里要用到SVD分解:奇异值分解(SVD)原理与在降维中的应用, D T D \mathbf D^T\mathbf D DTD的奇异值分解为:

也就是我们的特征值分解 A = W Σ W − 1 A=W\Sigma W^{-1} A=WΣW−1将特征值矩阵 Σ \Sigma Σ展开成连加的形式,将这个式子带入最小二乘,可以写成:

y可以由 D T D \mathbf D^T\mathbf D DTD的奇异值向量线性组合得到,也就是可以表示成如下形式:
其中


由于u和v正交,所以后两项为0, 且Du=奇异值乘对应的u,带入得到:
![]()
当v取0时上式有最小值,也就是仅由奇异值去确定,而奇异值随着i越大越小,所以在这里取4。
![]()
k4为1,所以y最小就是u4。
下面用程序来实现三角化。
三角化程序实现
这里只将重要代码贴上来:
/// TODO::homework; 请完成三角化估计深度的代码
// 遍历所有的观测数据,并三角化
Eigen::MatrixXd P_est; // 结果保存到这个变量
P_est.setZero();
/* your code begin */
auto loop_times = camera_pose.size()-start_frame_id;
Eigen::MatrixXd D((loop_times)*2,4);
for(int j=0;j<loop_times;++j)
{
Eigen::MatrixXd T_tmp(3,4);
T_tmp.block<3,3>(0,0)=camera_pose[j+3].Rwc.transpose();
T_tmp.block<3,1>(0,3)=-camera_pose[j+3].Rwc.transpose()*camera_pose[j+3].twc;
auto P_r1 = T_tmp.block<1,4>(0,0);
auto P_r2 = T_tmp.block<1,4>(1,0);
auto P_r3 = T_tmp.block<1,4>(2,0);
D.block<1,4>(2*j,0)=camera_pose[j+3].uv[0] * P_r3-P_r1;
D.block<1,4>(2*j+1,0)=camera_pose[j+3].uv[1] * P_r3-P_r2;
}
Eigen::Matrix4d D_res=D.transpose()*D;
Eigen::JacobiSVD<Eigen::Matrix4d> svd(D_res,Eigen::ComputeFullU|Eigen::ComputeFullV);
auto res_U = svd.matrixU();
auto res_V = svd.matrixV();
std::cout << "U=" << res_U << std::endl;
auto tmp = res_U.rightCols(1);
P_est=(tmp / tmp(3)).transpose().leftCols(3);
/* your code end */
std::cout <<"ground truth: \n"<< Pw.transpose() <<std::endl;
std::cout <<"your result: \n"<< P_est <<std::endl;
return 0;
首先将所有观测到该路标点的pose都遍历一遍,构建D矩阵。之后对 D T D \mathbf D^T\mathbf D DTD进行SVD分解,然后直接去取分解得到的U矩阵的第四列,注意这里要进行归一化,之后得到估计的y值。运行结果如下,发现和真实值相同了,说明程序效果很好。

最后的矩阵提取要用到一些Eigen的操作,这有一篇总结的文章不错可以参考:Eigen子矩阵操作