ORB-SLAM2学习(一、System框架搭建)—RGBD篇
参考链接:https://blog.csdn.net/qq_30356613/article/details/76409367 注释详细
https://blog.csdn.net/u010128736/article/details/53169832 思路清晰
-
整体流程如图所示:
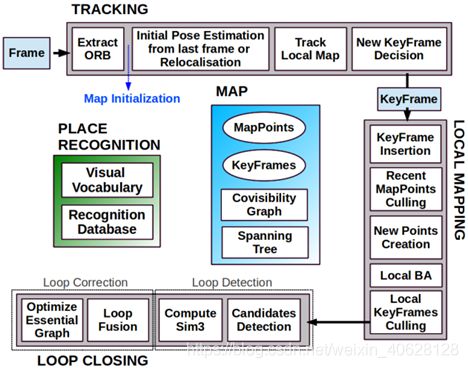
orb-slam主要有三个线程组成:跟踪、Local Mapping(又称小图)、Loop Closing(又称大图)。
(1)跟踪模块:主要是通过提取每一帧的ORB特征,通过恒速模型、关键帧模型、重定位估计相机初始位姿,然后通过共视关系跟踪局部局部地图来优化相机位姿进行优化,最后确定当前帧是否作为关键帧插入地图中。
(2)局部建图:主要是针对跟踪过程中产生的关键帧进行操作,包括把该关键帧插入到地图中,添加新的地图点,剔除冗余的关键帧、地图点,通过Local BA优化相机位姿和地图点。
(3)回环检测:同样针对关键帧进行操作,主要是通过BoW模型判断当前关键帧是否产生回环,如果产生可能的回环则进行回环一致性检测,通过一致性检测之后认为运动已经产生回环,则计算Sim3变换进行回环矫正,并另起线程进行全局优化。
其中跟踪模块需要处理摄像头获取的每一帧图像,从而实时估计相机位姿,而局部建图和回环检测通常只针对关键帧进行操作,因此不需要实时运行。
-
主程序:
由于我们将使用其做室外场景的RGBD,所以主要查看rgbd_tub.cc或ros_rgbd.cc(基于ros平台实现)主程 序,因为orb-slam配置realsense d435i方法基于ros平台跑通的,这里首 先查看ros_rgbd.cc主程序,将关键步骤做成思维导图如下所示:
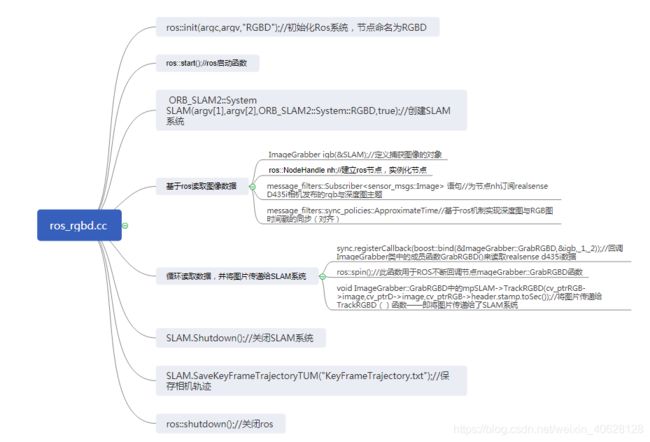
主函数中使用ROS编程的风格将该SLAM系统作为ROS上的一个节点来运行在ROS上面,通过订阅Kinect/Realsense D435I发布的话题,来获取Kinect/Realsense D435I上采集的图像信息。
Tip 1:
message_filters是一个用于roscpp和rospy的实用程序库,类似于一个消息缓存,当消息到达消息过滤器的时候,可能不会立即输出,而是在稍后的时间点满足一定条件下输出。(比如时间同步器,它接收来自多个源的不同类型的消息,并且仅当它们在相同时间戳的每个源上接收到消息才能输出它们,即起到一个消息同步输出的效果)。
message_filters::Subscriber
sub.registerCallback(myCallback);
等同于ros::Subscriber sub = nh.subscribe("my_topic", 1, myCallback);
告诉master我们要订阅my_topic((此处对应的是彩色相机与深度相机发布的topic:/kinect2/hd/image_color_rect与/kinect2/hd/image_depth_rect,采用不同的相机运行orb-slam2代码,需要查询相机发布的主题,并更改此处对应的topic话题))话题上的消息,当有消息发布到这个话题时,ros就会调用myCallback()函数,1为队列大小,以防我们处理消息的速度不够快,当缓存达到1条后,再有新消息到来就将开始丢弃先前接收的消息。
https://blog.csdn.net/chishuideyu/article/details/77479758
http://wiki.ros.org/cn/ROS/Tutorials/WritingPublisherSubscriber%28c%2B%2B%29
https://blog.csdn.net/wheelfjl/article/details/78653321 多传感器融合时间对齐,暂未看,后期融合IMU时可参考使用(基于ros基址的时间同步)
-
系统构建:
下面查看orb-slam的system构建,在system.cc中实现,这个代码是所有调用SLAM系统的主入口,在这里,我们将看到前面博客所说的ORB_SLAM的三大模块:Tracking、Mapping和LoopClosing。
/***********************************************************************************************************************************************
在看system.cc之前,我们要了解整个系统的输入和输出分别是什么(借鉴冯冰):
(1)输入:摄像头(包括图像+时间码),这个通过上面的ros_rgbd.cc已循环获得,并对其了深度图像与彩色图像的时间;
(2)输出:轨迹(每帧图像)+地图(关键帧+map point),其中轨迹及关键帧的选取在tracking线程进行,地图获取在map线程实现。
更为具体的输入如下:
(1)图像+时间码(传感器融合):每帧图像都有一个时间码,后期与传感器融合比较重要,对一些真实轨迹对比等比较重要;
(2)相机内参(如Asus.yaml)(标定好的,具体的标定方法后面会单独开一篇帖子总结)——相机尽量是个定焦镜头;
(3)提供相关配置文件:包括特征描述子对应的词汇表(后端会还检测时使用,需了解针对我们应用的场景该词汇表是否需特殊训练)(~/Vocabulary/ORBvoc.txt)、内部算法设置的全局经验值(也在Asus.yaml等文件里面)等;
**********************************************************************************************************************************************/
我们下面来看system.cc中的接口:

System的构建:

可以看到,类system的构造函数主要做了以下工作:
(1)检测传感器的种类,
(2)将配置文件和词典读入内存中,
(3)建立线程,分为四个,一个是主线程(tracking线程),第二个为局部建图线程(mptLocalMapping线程),第三个为回环检测线程(LoopClosing线程),第四个为实时显示线程(根据bUseViewer而定)
(4)各线程之间建立联系及通信
-
Tracking的函数入口:
我们在上面的ros——rgbd.cc中看到, 在main函数中节点的主要工作是不断回调成员函数ImageGrabber::GrabRGBD,而在该成员函数中除了验证一下传输数据是否正常并将ROS图片转变为cv::Mat格式外主要的工作量在不断调用SLAM->TrackRGBD(parameter)函数,这个函数就是主线程里调用tracking的函数入口。那么该函数的具体工作在什么呢?我们来看一下:
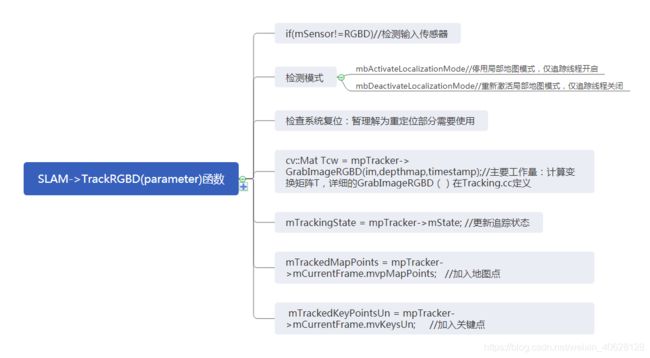
该函数主要的工作:
(1)检测输入传感器
(2)核查运行模式是否改变(主要就是核查mbActivateLocalizationMode和mbDeactivateLocalizationMode)
(3)检查是否需要复位
(4)计算变换矩阵T(GrabImageRGBD() 函数来计算)这一步将是主要的工作量所在
我们来详细看一下GrabImageRGBD

以上便是system的入口操作。在进行追踪线程之前,首先对新的数据(单目相机下为rgb图片,双目相机下为两张rgb图片,rgbd相机下为rgb图片和深度图)进行处理,将数据转化为灰度图,并根据数据建立新帧数据(在构建新帧数据时对新帧数据进行一些预处理,比如提取图片特征点ORBextrctor并计算关键点(位置方向)和描述子构建金字塔模型,对新帧的特征点位置根据矫正矩阵进行矫正)。
而GrabImageRGBD()函数的具体实现就是线程Tracking.cpp中的内容了,我们将在下一节中详细整理线程Tracking,有错误的地方期待指教。