线性代数学习心得(二)矩阵的逆和矩阵变换
本文最希望通过维度变换的角度,来思考矩阵的逆、行列式、以及行变换、列变换。
1、矩阵的逆
1.1、矩阵的逆是什么?
我们依旧把矩阵理解为函数或者说是映射。假设存在矩阵 ![]() 向量
向量![]() 。 那么
。 那么![]() 可以看成是
可以看成是 ![]() 。
。
我们令矩阵F的逆矩阵为 ![]() 。也就是函数
。也就是函数![]() 。
。
若 ![]() 也就是说,
也就是说,![]() 是
是 ![]() 的输出。显然矩阵*向量 = 向量 。那么
的输出。显然矩阵*向量 = 向量 。那么![]() 也是向量。
也是向量。
![]() 。
。
由此看出,原 ![]() 矩阵把
矩阵把 ![]() 向量映射成
向量映射成 ![]() 向量,而逆矩阵
向量,而逆矩阵 ![]() 就可以把
就可以把 ![]() 向量映射成
向量映射成![]() 。
。
写成数学式: ![]()
![]() 。
。
1.2、矩阵不可逆的情况
1.2.1 矩阵的秩
如果你了解些许函数的概念的话,你就能够明白矩阵可逆的条件了。既然矩阵可以映射,还能够通过映射的值找到原来的值。那么矩阵运算过程中就不能有数据丢失,就是函数中的一对一函数。
简单的说:矩阵 ![]() 可逆的条件是,对于任意两个不相同的向量
可逆的条件是,对于任意两个不相同的向量![]()
![]() 必定
必定![]() 。
。
关于矩阵的秩,大家都知道,矩阵有n行数字不全为0,矩阵的秩就是n。所以矩阵的秩就是矩阵的维度。
我们也知道,矩阵*向量时输出的向量的维度会与矩阵的维度相等。所以说:矩阵的秩,或者说矩阵的维度,就是该矩阵把向量映射后的维度。
假设矩阵的秩为 2,向量的维度是 3。 矩阵*向量后,向量的维度也是2。这里的数据是必然丢失的。可以想象,一个三维的向量被投射到一个二维的平面上,那么你永远不会知道它原来长什么样。例:
假设我遮住原向量,给你矩阵和乘法的结果。你能知道原向量吗?显然是不可能的,如下:
将这个为题变成方程组,也是三个未知数,两个方程。不可能得出唯一解。所以这不是一对一的,也就意味着你永远找不到原来的向量。
最后得出结论:矩阵满秩时(不为0的行数等于列数),矩阵是可逆的。
1.2.2矩阵中向量平行
矩阵中有向量是平行的,就说明,可以通过某种变换让矩阵降维(使某一行全为0,矩阵的秩减少。这种变换就是行变换,行变换不会改变矩阵原有的信息,后面我们会谈到。)此时,矩阵是不可逆的。
不过,除了矩阵的秩减少,我们可以换一个思维模式得到不可逆这个结论。例如:
![]() 显然矩阵的两个列向量
显然矩阵的两个列向量![]() 与
与 ![]() 平行或者说共线,同时行向量也平行。
平行或者说共线,同时行向量也平行。
如果你有阅读过我的上一篇线性代数博客,你应该还记得,矩阵乘法就是对矩阵中向量的线性组合。
所以:存在某个向量![]() 那么令
那么令 ![]() 。
。
向量 ![]() 是由 向量
是由 向量![]() 和
和 ![]() 线性组合而来。同时这两个向量是共线的。所以
线性组合而来。同时这两个向量是共线的。所以 ![]() 也与这两个向量共线。应该说矩阵
也与这两个向量共线。应该说矩阵 ![]() 所有的映射都会与这两条向量共线。
所有的映射都会与这两条向量共线。
向量 ![]() 原本是二维向量,现在被映射到了一条直线上(一维),明显数据是丢失的。
原本是二维向量,现在被映射到了一条直线上(一维),明显数据是丢失的。
再次得出结论:矩阵中有平行的向量时,矩阵不可逆。
1.2.3矩阵映射后出现出现0向量
当![]() 时,矩阵不可逆。
时,矩阵不可逆。
再回到线性组合的思想,在矩阵中的向量组合中,有0向量。这就说明了某个向量与其他全部向量的某种组合共线。这也就意味着,其他所有的向量可以组合出这个被抛弃的向量的所有情况。
这么说的特别的拗口。如图: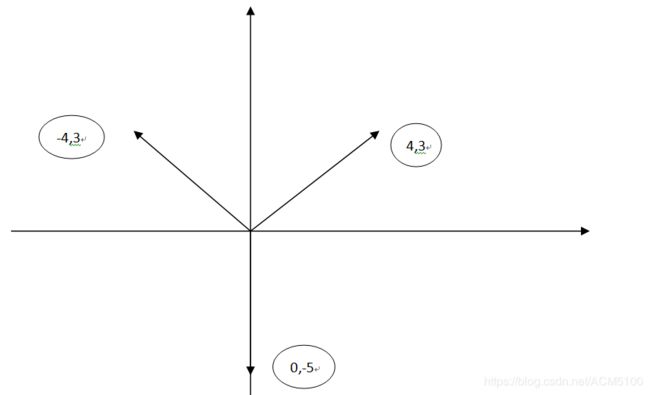
这里有三个向量![]()
![]()
![]() 令矩阵
令矩阵![]() ,我们利用前面两种向量线性组合,就能获得所有的二维的向量,所以说第三个向量是多余的。
,我们利用前面两种向量线性组合,就能获得所有的二维的向量,所以说第三个向量是多余的。
同样,很容易证明这个矩阵不是一对一映射的,这里就不多赘述了。
当我想要组合某一个向量时,我只需要对前面两个向量设置参数就行了。可以说第三个向量与所有的组成方式都没有关系。就是说第三个向量的参数一直设置为0,也不会让某种二维向量映射不出来。也许你听说过这个现象的另一个名字,线性无关。
1.2、逆的求法
1.2.1利用性质
矩阵对于其逆矩阵。就好像函数对于其反函数。
函数具有一个性质,![]() 。函数内嵌套复合函数,其函数值为x。(假设函数
。函数内嵌套复合函数,其函数值为x。(假设函数![]() 将集合
将集合![]() 映射到集合
映射到集合![]() ,那么
,那么![]() 就是将集合
就是将集合![]() 中的元素映射回原来
中的元素映射回原来![]() 中的元素)。
中的元素)。
例如函数 ![]() 它的反函数是
它的反函数是 ![]() 。
。 ![]() 同样
同样 ![]() 。
。
矩阵乘法就是函数嵌套。例如:矩阵![]() 我们理解成
我们理解成 ![]() 函数 其逆矩阵
函数 其逆矩阵![]() 是反函数
是反函数![]() 。 那么
。 那么![]() 就相当于
就相当于![]() 。(这里不得不提,在矩阵乘法时,我们总是从右往左乘,虽然矩阵乘法有交换律但是从右向左乘理解会方便很多。后面讲到矩阵变换时,其作用就会很明显)。
。(这里不得不提,在矩阵乘法时,我们总是从右往左乘,虽然矩阵乘法有交换律但是从右向左乘理解会方便很多。后面讲到矩阵变换时,其作用就会很明显)。
函数与反函数给我们的启发是,它们复合(无论谁在外层)的函数,我们输入 ![]() 依旧会得到一个
依旧会得到一个 ![]() 。映射前后,输入的值没有变化。这一点也同样可以放到矩阵乘法中。也就是说存在向量
。映射前后,输入的值没有变化。这一点也同样可以放到矩阵乘法中。也就是说存在向量![]() 和矩阵
和矩阵 ![]()
![]() 。
。
这也就意味着 ![]() (
(![]() 矩阵往往作为单位矩阵的标识出现。所谓的单位矩阵,就是它乘某个向量时,向量不会变化)。 同理:
矩阵往往作为单位矩阵的标识出现。所谓的单位矩阵,就是它乘某个向量时,向量不会变化)。 同理:![]() 。
。
我们来举个例子求逆矩阵:
矩阵![]()
![]()
![]() (单位矩阵上的左对角线全部为1,其余部分都为0)
(单位矩阵上的左对角线全部为1,其余部分都为0)
![]()
这里利用矩阵乘法直接解方程,就能得到各个字母等于多少。从而求出逆矩阵。
1.2.2增广矩阵
我并不太喜欢增广矩阵这个说法,虽然这个名词很重要,但是这里我还是想用原理说清楚为什么可以利用增广矩阵。
我们常常看到的通过增广矩阵的解法是这样的。
求![]() 的逆矩阵 那么画出矩阵
的逆矩阵 那么画出矩阵 ![]() 这个矩阵的左边是原矩阵,右边是单位矩阵。通过行变换,将矩阵变成
这个矩阵的左边是原矩阵,右边是单位矩阵。通过行变换,将矩阵变成![]() 这个时候,右边的矩阵
这个时候,右边的矩阵![]() 就是原矩阵的逆矩阵。
就是原矩阵的逆矩阵。
为什么呢?
这里我们需要理解行变换。行变换就是矩阵乘某些变换矩阵,让行移位或者相消。
例如:对矩阵![]() 变换成
变换成![]() 就是行二减二倍行一。前后矩阵蕴含的信息和性质不变。
就是行二减二倍行一。前后矩阵蕴含的信息和性质不变。
这个变换过程可以通过矩阵乘法实现,令行二变换的矩阵为![]() .
.![]() 。再令行一变换的矩阵为
。再令行一变换的矩阵为![]() 。
。
![]()
很容易理解 ![]() (记得我前面写的,矩阵从右往左乘。但是在此强调,矩阵乘法是函数嵌套,同理通过乘逆矩阵变回原来的矩阵,就要先乘最后一个被乘的矩阵的逆矩阵。你脱鞋子之后再脱袜子,逆过程就是先穿袜子再穿鞋子)。
(记得我前面写的,矩阵从右往左乘。但是在此强调,矩阵乘法是函数嵌套,同理通过乘逆矩阵变回原来的矩阵,就要先乘最后一个被乘的矩阵的逆矩阵。你脱鞋子之后再脱袜子,逆过程就是先穿袜子再穿鞋子)。
既然![]() 而
而 ![]() 那么
那么 ![]() 。
。
增广矩阵就是 ![]() 左边为
左边为 ![]() 矩阵右边为
矩阵右边为 ![]() 矩阵。
矩阵。 ![]() 。
。
所有右边的矩阵就是![]() 的逆矩阵。
的逆矩阵。
2.变换矩阵
关于行变换矩阵,我将介绍具体怎么写这个矩阵。已经里面蕴含的思想。
虽然我说了我们常常把矩阵乘法想像为从右往左乘,但是现在你需要反过来,从左往右乘。
这里你得需要前置知识在我的上一篇博客中:https://blog.csdn.net/ACM5100/article/details/88036414
这里重申最为重要的一点:矩阵相乘可以理解成,对左边矩阵的列向量的线性组合,也可以是对右边矩阵行向量的线性组合。
那么我假设你理解这句话:
矩阵![]()
![]() 我们令
我们令![]()
变换后的矩阵,第一行没有变换(就是第一行的1倍+第二行的0倍)![]() 第二行是由第一行的-2倍加上第二行的1倍 所以
第二行是由第一行的-2倍加上第二行的1倍 所以 ![]() 。
。
也就是说,变换矩阵不需要计算,可以直接写出来。变换矩阵![]() 记录的是变换前的矩阵
记录的是变换前的矩阵 ![]() 的某一行对变换后的贡献。
的某一行对变换后的贡献。
当然,这里肯定需要先理解矩阵乘法。再次安利我的上一篇。
3.结语
首先总结一下、我一共介绍了一下几点
1、矩阵逆不存在的情况
2、矩阵的逆的求法
3、变换矩阵的原理
结语没啥好说的。假设你看到这篇博客,欢迎你给出你的宝贵建议。欢迎评论讨论问题。