ardupilot & px4 书写自己的app & drivers (二)
新建任务列表任务–打印时间
任务列表
const AP_Scheduler::Task Copter::scheduler_tasks[] = {
......
SCHED_TASK(my_loop, 2, 90),
......
}函数
void Copter::my_loop()
{
uint32_t timer = micros();
printf("timer=%u",timer);
}Copter.h声明
class Copter : public AP_HAL::HAL::Callbacks {
public:
...
private:
...
void three_hz_loop();
void my_loop();
...
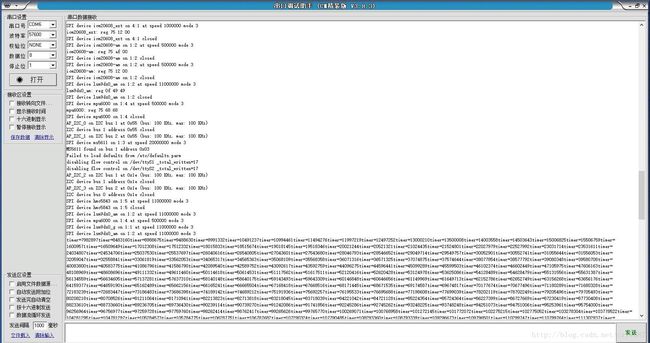
}serial5的打印结果
[init] card mounted at /fs/microsd
sercon: Registering CDC/ACM serial driver
sercon: Successfully registered the CDC/ACM serial driver
[init] USB interface connected
Running rc.APM
Mounting binfs
binfs mounted OK
nsh: rm: unlink failed: No such file or directory
uorb started OK
Starting ArduPilot
Starting ArduCopter uartA=/dev/ttyACM0 uartC=/dev/ttyS1 uartD=/dev/ttyS2 uartE=/dev/ttyS6 uartF=/dev/ttyS5
initialised /dev/ttyS3 OK 1024 5ArduPilot started OK
12
rc.APM finished
initialised /dev/ttyS1 OK 1024 5
12
NuttShell (NSH)
initialised /dev/ttyS2 OK 1024 5nsh> 12
[Kinitialised /dev/ttyS6 OK 1024 512
initialised /dev/ttyS5 OK 1024 512
Starting driver mtd start /fs/mtd
mtd: started OK
Starting driver mtd readtest /fs/mtd
reading /fs/mtd expecting 16384 bytes
readtest OK
mtd: readtest OK
initialised /dev/ttyACM0 OK 4096 1024
Failed to load defaults from /etc/defaults.parm
Starting driver adc start
adc init done
ADC started OK
Starting driver px4io start norc
px4io default PWM output device
px4io started OK
Starting driver px4io checkcrc /etc/px4io/px4io.bin
px4io: CRCs match
PX4IO CRC OK
Starting driver fmu mode_pwm4
fmu mode_pwm4 started OK
SPI device mpu6000_ext on 4:1 at speed 500000 mode 3
mpu6000_ext: reg 75 68 00
SPI device mpu6000_ext on 4:1 closed
SPI device mpu9250_ext on 4:1 at speed 1000000 mode 3
mpu9250_ext: reg 75 71 00
SPI device mpu9250_ext on 4:1 closed
SPI device icm20608_ext on 4:1 at speed 1000000 mode 3
icm20608_ext: reg 75 af 00
SPI device icm20608_ext on 4:1 closed
SPI device icm20608_ext on 4:1 at speed 1000000 mode 3
icm20608_ext: reg 75 12 00
SPI device icm20608_ext on 4:1 closed
SPI device icm20608-am on 1:2 at speed 500000 mode 3
icm20608-am: reg 75 af 00
SPI device icm20608-am on 1:2 closed
SPI device icm20608-am on 1:2 at speed 500000 mode 3
icm20608-am: reg 75 12 00
SPI device icm20608-am on 1:2 closed
SPI device lsm9ds0_am on 1:2 at speed 11000000 mode 3
lsm9ds0_am: reg 0f 49 49
SPI device lsm9ds0_am on 1:2 closed
SPI device mpu6000 on 1:4 at speed 500000 mode 3
mpu6000: reg 75 68 68
SPI device mpu6000 on 1:4 closed
AP_I2C_0 on I2C bus 1 at 0x55 (bus: 100 KHz, max: 100 KHz)
I2C device bus 1 address 0x55 closed
AP_I2C_1 on I2C bus 2 at 0x55 (bus: 100 KHz, max: 100 KHz)
SPI device ms5611 on 1:3 at speed 20000000 mode 3
MS5611 found on bus 1 address 0x03
Failed to load defaults from /etc/defaults.parm
disabling flow control on /dev/ttyS1 _total_written=17
disabling flow control on /dev/ttyS2 _total_written=17
AP_I2C_2 on I2C bus 1 at 0x1e (bus: 100 KHz, max: 100 KHz)
I2C device bus 1 address 0x1e closed
AP_I2C_3 on I2C bus 2 at 0x1e (bus: 100 KHz, max: 100 KHz)
I2C device bus 0 address 0x1e closed
SPI device hmc5843 on 1:5 at speed 11000000 mode 3
SPI device hmc5843 on 1:5 closed
SPI device lsm9ds0_am on 1:2 at speed 11000000 mode 3
SPI device mpu6000 on 1:4 at speed 500000 mode 3
SPI device lsm9ds0_g on 1:1 at speed 11000000 mode 3
SPI device lsm9ds0_am on 1:2 at speed 11000000 mode 3
SPI device mpu6000 on 1:4 at speed 500000 mode 3
SPI device lsm9ds0_g on 1:1 at speed 11000000 mode 3
SPI device lsm9ds0_am on 1:2 at speed 11000000 mode 3
timer=7982897timer=8483160timer=8988675timer=9488630timer=9991332timer=10491237timer=10994461timer=11494276timer=11997219timer=12497252timer=13000210timer=13500008timer=14003558timer=14503643timer=15006825timer=15506759timer=16009571timer=16509649timer=17012308timer=17512332timer=18015833timer=18515674timer=19018145timer=19518346timer=20021244timer=20521321timer=21024435timer=21524801timer=22027979timer=22527992timer=23031714timer=23531611timer=24034807timer=24534706timer=25037530timer=25537697timer=26040616timer=26540805timer=27043601timer=27543680timer=28046793timer=28546652timer=29049714timer=29549757timer=30052901timer=30552741timer=31055644timer=31556053timer=32059047timer=32558841timer=33061819timer=33562053timer=34065317timer=34565363timer=35068109timer=35568358timer=36071316timer=36571325timer=37074875timer=37574644timer=38077854timer=38577792timer=39080348timer=39580708timer=40083800timer=40583775timer=41086796timer=41586790timer=42089540timer=42589752timer=43092617timer=43592759timer=44096275timer=44596441timer=45099289timer=45599503timer=46102374timer=46602449timer=47105975timer=47606163timer=48108969timer=48608696timer=49111332timer=49611460timer=50114618timer=50614531timer=51117562timer=51617511timer=52120416timer=52620428timer=53124978timer=53625086timer=54128489timer=54628479timer=55131556timer=55631387timer=56134559timer=56634605timer=57137281timer=57637310timer=58140148timer=58640175timer=59143493timer=59643309timer=60146848timer=60646656timer=61149969timer=61649713timer=62152786timer=62652749timer=63156268timer=63656176timer=64159377timer=64659190timer=65162489timer=65662156timer=66165241timer=66665504timer=67168418timer=67668516timer=68171445timer=68671535timer=69174587timer=69674817timer=70177674timer=70677496timer=71180289timer=71680328timer=72183239timer=72683447timer=73186483timer=73686398取出2个数73686398-73186483=499915,正好差不多500ms
在libraries下新加自己的库文件
任务列表
const AP_Scheduler::Task Copter::scheduler_tasks[] = {
......
SCHED_TASK(my_loop, 2, 90),
SCHED_TASK(my_app, 2, 90),//也是2hz的运行该函数
......
}ArduCopter文件夹中新建my_app.cpp文件
内容为:
#include "Copter.h"
void Copter::my_app()
{
my_lib.update();
}Copter.h声明
class Copter : public AP_HAL::HAL::Callbacks {
public:
...
private:
...
AP_Notify notify;
AP_my_lib my_lib;
...
void three_hz_loop();
void my_loop();
...
}libraries下新建AP_my_lib文件夹,并建立如下目录结构:
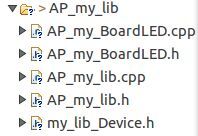
AP_my_lib.cpp内容:
#include AP_my_lib.h内容:
#pragma once
#include my_lib_Device.h内容:
#pragma once
#include AP_my_BoardLED.cpp内容:
#include "AP_my_BoardLED.h"
#include "AP_my_lib.h"
#if (defined(HAL_GPIO_A_LED_PIN) && defined(HAL_GPIO_B_LED_PIN) && \
defined(HAL_GPIO_C_LED_PIN))
extern const AP_HAL::HAL& hal;
bool AP_my_BoardLED::init(void)
{
// setup the main LEDs as outputs
hal.gpio->pinMode(HAL_GPIO_A_LED_PIN, HAL_GPIO_OUTPUT);
hal.gpio->pinMode(HAL_GPIO_B_LED_PIN, HAL_GPIO_OUTPUT);
hal.gpio->pinMode(HAL_GPIO_C_LED_PIN, HAL_GPIO_OUTPUT);
// turn all lights off
hal.gpio->write(HAL_GPIO_A_LED_PIN, HAL_GPIO_LED_OFF);
hal.gpio->write(HAL_GPIO_B_LED_PIN, HAL_GPIO_LED_OFF);
hal.gpio->write(HAL_GPIO_C_LED_PIN, HAL_GPIO_LED_OFF);
return true;
}
/*
main update function called at 50Hz
*/
void AP_my_BoardLED::update(void)
{
}
#else
bool AP_BoardLED::init(void) {return true;}
void AP_BoardLED::update(void) {return;}
#endifAP_my_BoardLED.h内容:
#pragma once
#include 最重要的是在ArduCopter/make.inc中添加
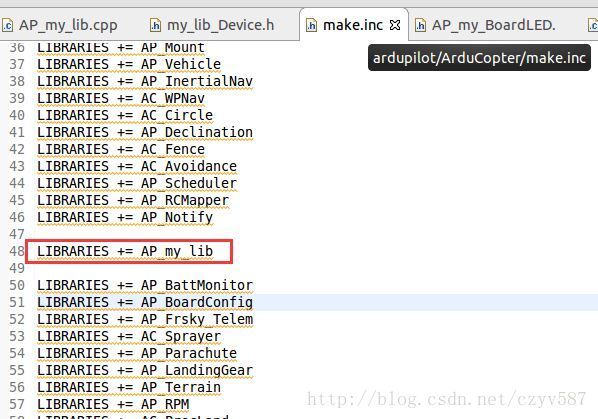
LIBRARIES += AP_my_lib只有添加了这个makefile才会编译之前写的库文件
至于原因:ardupilot/mk/sketch_source.mk中
# get list of libraries from make.inc
include $(MAKE_INC)
include $(GLOBAL_MAKE_INC)
LIBTOKENS := $(LIBRARIES)将make.inc文件的库目录列表添加到LIBTOKENS中
主要是模仿AP_Notify文件的写法并且让语法通过。
实验验证:
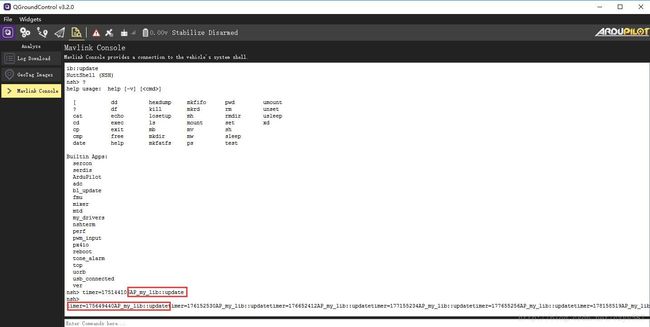
正好是一次“timers=xxxxxx”,一次“AP_my_lib::update”(因为都是2hz的运行)
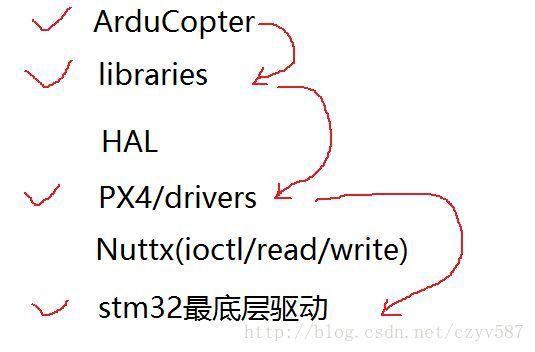
ArduCopter层调用px4/drivers
之前已经写好了
- ArduCopter的my_app
- libraries/AP_my_lib
- px4/src/divers/my_drivers
my_drivers请看http://blog.csdn.net/czyv587/article/details/77817314
现在要做的是libraries/AP_my_lib调用px4/src/divers/my_drivers
可以参考其他lib层如何调用底层驱动的写法,之前分析过ardupilot读取传感器的过程(http://blog.csdn.net/czyv587/article/details/77171608),可以参考下
先上程序
AP_my_lib.cpp
#include AP_my_lib.h
#pragma once
#include 以上主要是利用px4_start_driver()跳转到px4/src/drivers层中运行相应的驱动程序
本程序实现的原理是
实验验证
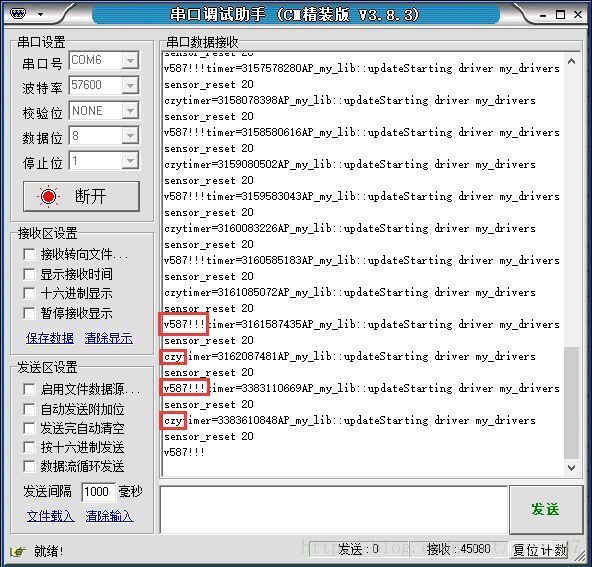
本来应该直接看闪灯的现象,但是这里只好看my_drivers里打印的东西
int my_drivers_main(int argc, char *argv[])
{
if(l_i==0)
{
// led_on(1);
led_toggle(1);
l_i=1;
printf("czy");
}
else if(l_i==1)
{
// led_off(1);
led_toggle(1);
l_i=0;
printf("v587!!!");
}
return 0;
}点亮RBG_led
RBG_led是I2C驱动的,所以正好可以看下如何使用I2C驱动。在此之前需要理清notify里关于RBG_led的程序结构。
ArduCopter.cpp init_ardupilot()
ArduCopter.cpp 任务列表SCHED_TASK(update_notify,50,90)
|
lib/system.cpp notify.init()
lib/led.cpp notify.update() /
| | init()//需要寻找class NotifyDevice纯虚函数的实现,在class RGBLed中实现
| | update()//需要寻找class NotifyDevice纯虚函数的实现,在class RGBLed中实现
AP_Notify.cpp _devices[1] = new ToshibaLED_I2C(); 对象--| handle_led_control()
| | handle_play_tune()
| \
| /
| |hw_init() <------------|---------|
class ToshibaLED_I2C 类---|hw_set_rgb() |(调用) |
| |_timer()//点亮灯 2000us--| |
| \ |
| |(实现)
class ToshibaLED 类 |
| |
| |
| / |
class RGBLed 类--|virtual init()-->hw_init()----------|
| |update()--->update_colours()//逻辑上应该显示什么颜色
| | --->set_rgb()颜色传递给_red_curr、_green_curr、_blue_curr
| \
class NotifyDevice 类需要说明的是,如果找到一个没实现的虚函数或者纯虚函数,不要怕,需要找到他的子类或者友元类,去找该虚函数的实现。感觉写一个RGB_led需要这么多类,完全是为了好封装,我的类只管自己的,给其他提供一个简单的接口,找函数实现就从最基的基类往前找。
逻辑理清后,就会发现只需要
AP_HAL::OwnPtr<AP_HAL::I2CDevice> _dev;就可以直接调用I2C的接口了
void my_LED_I2C::_timer(void)
{
...
_dev->transfer(val, sizeof(val), nullptr, 0);
}那么传代码
ArduCopter/system.cpp
void Copter::init_ardupilot()
{
// notify.init(true);//注释掉原来的RGB_led初始化
my_lib.init(true);//用自己的RGB_led初始化
}ArduCopter/my_app.cpp不变
lib/AP_my_lib.cpp
#include AP_my_lib.h添加了一些逻辑处理的变量和宏定义
#pragma once
#include my_LED_I2C.cpp对应于ToshibaLED_I2C.cpp
只需要替换成自己的文件名字
#include "my_LED_I2C.h"
#include my_LED_I2C.h对应于ToshibaLED_I2C.h
也是只需要改名字
#pragma once
#include _dev;
void _timer(void);
bool _need_update;
struct {
uint8_t r, g, b;
} rgb;
}; my_LED.cpp对应于ToshibaLED.cpp
只需要改名字
#include "my_LED.h"
#define TOSHIBA_LED_BRIGHT 0xFF // full brightness
#define TOSHIBA_LED_MEDIUM 0x80 // medium brightness
#define TOSHIBA_LED_DIM 0x11 // dim
#define TOSHIBA_LED_OFF 0x00 // off
my_LED::my_LED():
my_RGBLed(TOSHIBA_LED_OFF, TOSHIBA_LED_BRIGHT, TOSHIBA_LED_MEDIUM, TOSHIBA_LED_DIM)
{
}my_LED.h对应于ToshibaLED.h
只需要改名字
#pragma once
#include "my_RGBLed.h"
class my_LED: public my_RGBLed {
public:
my_LED();
};my_lib_Device.h不用改
my_RGBLed.cpp对应于RGBLed.cpp,相当于是点亮RGB_led的应用层(处理逻辑)
#include "my_RGBLed.h"
#include <AP_HAL/AP_HAL.h>
#include <AP_GPS/AP_GPS.h>
#include "AP_my_lib.h"
extern const AP_HAL::HAL& hal;
my_RGBLed::my_RGBLed(uint8_t led_off, uint8_t led_bright, uint8_t led_medium, uint8_t led_dim):
counter(0),
step(0),
_healthy(false),
_red_des(0),
_green_des(0),
_blue_des(0),
_red_curr(0),
_green_curr(0),
_blue_curr(0),
_led_off(led_off),
_led_bright(led_bright),
_led_medium(led_medium),
_led_dim(led_dim)
{
}
bool my_RGBLed::init()
{
_healthy = hw_init();
printf("_healthy=%u",_healthy);
return _healthy;
}
// set_rgb - set color as a combination of red, green and blue values
void my_RGBLed::_set_rgb(uint8_t red, uint8_t green, uint8_t blue)
{
if (red != _red_curr ||
green != _green_curr ||
blue != _blue_curr) {
// call the hardware update routine
if (hw_set_rgb(red, green, blue)) {
_red_curr = red;
_green_curr = green;
_blue_curr = blue;
}
}
}
// set_rgb - set color as a combination of red, green and blue values
void my_RGBLed::set_rgb(uint8_t red, uint8_t green, uint8_t blue)
{
_set_rgb(red, green, blue);
}
// _scheduled_update - updates _red, _green, _blue according to notify flags
int l_j=0;
void my_RGBLed::update_colours(void)
{
uint8_t brightness = _led_bright;
if(l_j==0)//三色依次交替
{
_red_des = brightness;
_blue_des = _led_off;
_green_des = _led_off;
l_j=1;
}
else if(l_j==1)
{
_red_des = _led_off;
_blue_des = brightness;
_green_des = _led_off;
l_j=2;
}
else if(l_j==2)
{
_red_des = _led_off;
_blue_des = _led_off;
_green_des = brightness;
l_j=0;
}
}
void my_RGBLed::update()
{
update_colours();
set_rgb(_red_des, _green_des, _blue_des);
}
/*
update LED when in override mode
*/
void my_RGBLed::update_override(void)
{
if (_led_override.rate_hz == 0) {
// solid colour
_set_rgb(_led_override.r, _led_override.g, _led_override.b);
return;
}
// blinking
uint32_t ms_per_cycle = 1000 / _led_override.rate_hz;
uint32_t cycle = (AP_HAL::millis() - _led_override.start_ms) % ms_per_cycle;
if (cycle > ms_per_cycle / 2) {
// on
_set_rgb(_led_override.r, _led_override.g, _led_override.b);
} else {
_set_rgb(0, 0, 0);
}
}my_RGBLed.h
#pragma once
#include 您的鼓励将是笔者书写高质量文章的最大动力^_^!!
