ORB-SLAM2从理论到代码实现(五):ORBmatcher.cc程序详解
本人邮箱 [email protected],欢迎交流!转载请注明地址https://blog.csdn.net/qq_20123207/article/details/82502207
在上篇博客中,我主要写了多视图几何中的知识。本篇博客我们一起学习ORBmatcher.CC。
1.主要方法介绍
- SearchByProjection(Frame &F, const vector
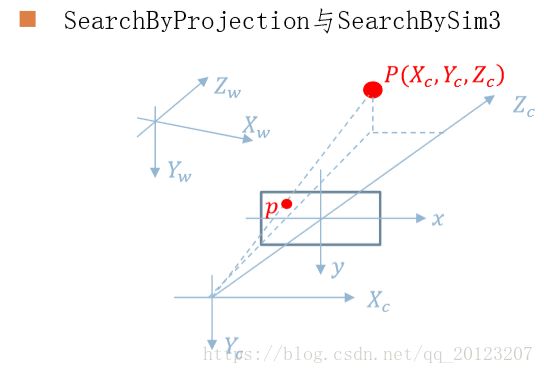
| 函数功能 | SearchByProjection函数利用将相机坐标系下的Location MapPoints投影到图像坐标系,,在其投影点附近根据描述子距离选取匹配,由此增加当前帧的MapPoints |
| 参数说明 | |
| F | 当前帧 |
| vpMapPoints | Local MapPoints |
| th | 搜索半径的因子 |
| 返回值 | 成功匹配的数量 |
int ORBmatcher::SearchByProjection(Frame &F, const vector &vpMapPoints, const float th)
{
int nmatches=0;//匹配数量
const bool bFactor = th!=1.0;//阈值
for(size_t iMP=0; iMPmbTrackInView)//在SearchLocalPoints()中已经将Local MapPoints
//重投影(isInFrustum())到当前帧,并标记了这些点是否在当前帧的视野中即mbTrackInView if(pMP->isBad())//如果质量不好不用
continue;
// 通过距离预测的金字塔层数,该层数相对于当前的帧
const int &nPredictedLevel = pMP->mnTrackScaleLevel;
// The size of the window will depend on the viewing direction
// 搜索窗口的大小取决于视角, 若当前视角和平均视角夹角接近0度时, r取一个较小的值
float r = RadiusByViewingCos(pMP->mTrackViewCos);
// 如果需要进行更粗糙的搜索,则增大范围
if(bFactor)
r*=th;
// 通过投影点(投影到当前帧,见isInFrustum())以及搜索窗口和预测的尺度进行搜索, 找出附近的兴趣点
const vector vIndices =
F.GetFeaturesInArea(pMP->mTrackProjX,pMP->mTrackProjY,r*F.mvScaleFactors[nPredictedLevel],nPredictedLevel-1,nPredictedLevel);
if(vIndices.empty())//没找到兴趣点
continue;
const cv::Mat MPdescriptor = pMP->GetDescriptor();//求描述子
int bestDist=256;
int bestLevel= -1;
int bestDist2=256;
int bestLevel2 = -1;
int bestIdx =-1 ;
// Get best and second matches with near keypoints
for(vector::const_iterator vit=vIndices.begin(), vend=vIndices.end(); vit!=vend; vit++)
{
const size_t idx = *vit;
// 如果Frame中的该兴趣点已经有对应的MapPoint了,则退出该次循环
if(F.mvpMapPoints[idx])
if(F.mvpMapPoints[idx]->Observations()>0)
continue;
if(F.mvuRight[idx]>0)
{
const float er = fabs(pMP->mTrackProjXR-F.mvuRight[idx]);
if(er>r*F.mvScaleFactors[nPredictedLevel])
continue;
}
const cv::Mat &d = F.mDescriptors.row(idx);
const int dist = DescriptorDistance(MPdescriptor,d);//求取描述子距离
// 根据描述子寻找描述子距离最小和次小的特征点
if(distmfNNratio*bestDist2)
continue;
F.mvpMapPoints[bestIdx]=pMP; // 为Frame中的兴趣点增加对应的MapPoint
nmatches++;
}
}
return nmatches;
}
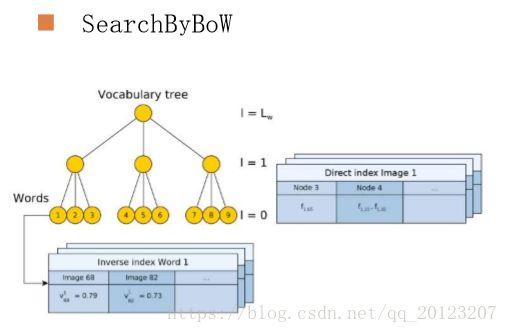
| 函数功能 | 通过词袋(bow)对关键帧(pKF)和当前帧(F)中的特征点进行快速匹配,不属于同一节点(node)的特征点直接跳过匹配,对属于同一节点(node0的特征点通过描述子距离进行匹配,根据匹配,用关键帧(pKF)中特征点对应的MapPoint更新F中特征点对应的MapPoints,通过距离阈值、比例阈值和角度投票进行剔除误匹配 |
| pKF | 关键帧 |
| F | 当前帧 |
| vpMapPointMatches | 当前帧中MapPoints对应的匹配,NULL表示未匹配 |
| 返回值 | 成功匹配的数量 |
int ORBmatcher::SearchByBoW(KeyFrame* pKF,Frame &F, vector &vpMapPointMatches)
{
const vector vpMapPointsKF = pKF->GetMapPointMatches();
vpMapPointMatches = vector(F.N,static_cast(NULL));
const DBoW2::FeatureVector &vFeatVecKF = pKF->mFeatVec;
int nmatches=0;//匹配点个数
vector rotHist[HISTO_LENGTH];
for(int i=0;ifirst == Fit->first) //步骤1:分别取出属于同一node的ORB特征点(只有属于同一node,才有可能是匹配点)
{
const vector vIndicesKF = KFit->second;
const vector vIndicesF = Fit->second;
// 步骤2:遍历KF中属于该node的特征点
for(size_t iKF=0; iKFisBad())
continue;
const cv::Mat &dKF= pKF->mDescriptors.row(realIdxKF); // 取出KF中该特征对应的描述子
int bestDist1=256; // 最好的距离(最小距离)
int bestIdxF =-1 ;
int bestDist2=256; // 倒数第二好距离(倒数第二小距离)
// 步骤3:遍历F中属于该node的特征点,找到了最佳匹配点
for(size_t iF=0; iF(bestDist1)(bestDist2))
{
// 步骤5:更新特征点的MapPoint
vpMapPointMatches[bestIdxF]=pMP;
const cv::KeyPoint &kp = pKF->mvKeysUn[realIdxKF];
if(mbCheckOrientation)
{
// trick!
// angle:每个特征点在提取描述子时的旋转主方向角度,如果图像旋转了,这个角度将发生改变
// 所有的特征点的角度变化应该是一致的,通过直方图统计得到最准确的角度变化值
float rot = kp.angle-F.mvKeys[bestIdxF].angle;// 该特征点的角度变化值
if(rot<0.0)
rot+=360.0f;
int bin = round(rot*factor);// 将rot分配到bin组
if(bin==HISTO_LENGTH)
bin=0;
assert(bin>=0 && binfirst < Fit->first)
{
KFit = vFeatVecKF.lower_bound(Fit->first);
}
else
{
Fit = F.mFeatVec.lower_bound(KFit->first);
}
}
// 根据方向剔除误匹配的点
if(mbCheckOrientation)
{
int ind1=-1;
int ind2=-1;
int ind3=-1;
// 计算rotHist中最大的三个的index
ComputeThreeMaxima(rotHist,HISTO_LENGTH,ind1,ind2,ind3);
for(int i=0; i(NULL);
nmatches--;
}
}
}
return nmatches;
}
SearchByProjection(KeyFrame* pKF, cv::Mat Scw, const vector
| 函数功能 | 根据Sim3变换,将每个vpPoints投影到pKF上,并根据尺度确定一个搜索区域,根据该MapPoint的描述子与该区域内的特征点进行匹配,如果匹配误差小于TH_LOW即匹配成功,更新vpMatched |
| 参数说明 | |
| pKF | 关键帧 |
| Scw | Sim3矩阵,即变换矩阵 |
| vpPoints | MapPoint |
| vpMatched | MapPoint的匹配点 |
| th | 搜索半径的因子 |
| 返回值 | 成功匹配的数量 |
int ORBmatcher::SearchByProjection(KeyFrame* pKF, cv::Mat Scw, const vector &vpPoints, vector &vpMatched, int th)
{
// Get Calibration Parameters for later projection
//获取相机内参
const float &fx = pKF->fx;
const float &fy = pKF->fy;
const float &cx = pKF->cx;
const float &cy = pKF->cy;
// Decompose Scw
// 分解Scw矩阵,可以自己推一下公式
cv::Mat sRcw = Scw.rowRange(0,3).colRange(0,3);
const float scw = sqrt(sRcw.row(0).dot(sRcw.row(0)));// 计算得到尺度s
cv::Mat Rcw = sRcw/scw;
cv::Mat tcw = Scw.rowRange(0,3).col(3)/scw;// pKF坐标系下,世界坐标系到pKF的位移,方向由世界坐标系指向pKF
cv::Mat Ow = -Rcw.t()*tcw;// 世界坐标系下,pKF到世界坐标系的位移(世界坐标系原点相对pKF的位置),方向由pKF指向世界坐标系
// Set of MapPoints already found in the KeyFrame
// 使用set类型,并去除没有匹配的点,用于快速检索某个MapPoint是否有匹配
set spAlreadyFound(vpMatched.begin(), vpMatched.end());
spAlreadyFound.erase(static_cast(NULL));//Null代表没匹配
int nmatches=0;//成功匹配个数
// For each Candidate MapPoint Project and Match
// 遍历所有的MapPoints
for(int iMP=0, iendMP=vpPoints.size(); iMPisBad() || spAlreadyFound.count(pMP))
continue;
// Get 3D Coords.
//获取三维坐标
cv::Mat p3Dw = pMP->GetWorldPos();
// Transform into Camera Coords.
//转化到相机坐标系
cv::Mat p3Dc = Rcw*p3Dw+tcw;
// Depth must be positive
//求得的深度值必须为正
if(p3Dc.at(2)<0.0)
continue;
// Project into Image投影到图片上
const float invz = 1/p3Dc.at(2);
const float x = p3Dc.at(0)*invz;
const float y = p3Dc.at(1)*invz;
const float u = fx*x+cx;
const float v = fy*y+cy;
// Point must be inside the image不在图片上的点去掉
if(!pKF->IsInImage(u,v))
continue;
// Depth must be inside the scale invariance region of the point
// 判断距离是否在尺度协方差范围内
const float maxDistance = pMP->GetMaxDistanceInvariance();
const float minDistance = pMP->GetMinDistanceInvariance();
cv::Mat PO = p3Dw-Ow;
const float dist = cv::norm(PO);
if(distmaxDistance)//超出范围
continue;
// Viewing angle must be less than 60 deg视角必须小于60度
cv::Mat Pn = pMP->GetNormal();
if(PO.dot(Pn)<0.5*dist)
continue;
int nPredictedLevel = pMP->PredictScale(dist,pKF);
// Search in a radius
// 根据尺度确定搜索半径
const float radius = th*pKF->mvScaleFactors[nPredictedLevel];
const vector vIndices = pKF->GetFeaturesInArea(u,v,radius);
if(vIndices.empty())
continue;
// Match to the most similar keypoint in the radius匹配最相似的点
const cv::Mat dMP = pMP->GetDescriptor();
int bestDist = 256;
int bestIdx = -1;
// 遍历搜索区域内所有特征点,与该MapPoint的描述子进行匹配
for(vector::const_iterator vit=vIndices.begin(), vend=vIndices.end(); vit!=vend; vit++)
{
const size_t idx = *vit;
if(vpMatched[idx])
continue;
const int &kpLevel= pKF->mvKeysUn[idx].octave;
if(kpLevelnPredictedLevel)
continue;
const cv::Mat &dKF = pKF->mDescriptors.row(idx);
const int dist = DescriptorDistance(dMP,dKF);
if(dist - SearchByBoW(KeyFrame *pKF1, KeyFrame *pKF2, vector
&vpMatches12)
| 函数功能 | 通过词包,对关键帧的特征点进行跟踪,该函数用于闭环检测时两个关键帧间的特征点匹配,通过bow对pKF和F中的特征点进行快速匹配(不属于同一node的特征点直接跳过匹配),对属于同一node的特征点通过描述子距离进行匹配,根据匹配,更新vpMatches12 |
| pKF1 | KeyFrame1 |
| pKF2 | KeyFrame2 |
| vpMatches12 | pKF2中与pKF1匹配的MapPoint,null表示没有匹配 |
| 返回值 | 成功匹配的数量 |
程序和上面讲解的类似,略。有问题联系[email protected].
- SearchForTriangulation(KeyFrame *pKF1, KeyFrame *pKF2, cv::Mat F12,vector
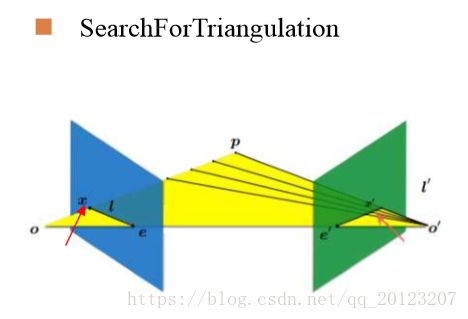
| 函数功能 | 利用基本矩阵F12,在两个关键帧之间未匹配的特征点中产生新的3d点 |
| 参数说明 | |
| pKF1 | 关键帧1 |
| pKF2 | 关键帧2 |
| F12 | 基础矩阵 |
| vMatchedPairs | 存储匹配特征点对,特征点用其在关键帧中的索引表示 |
| bOnlyStereo | 在双目和rgbd情况下,要求特征点在右图存在匹配 |
| 返回值 | 成功匹配的数量 |
int ORBmatcher::SearchForTriangulation(KeyFrame *pKF1, KeyFrame *pKF2, cv::Mat F12,
vector > &vMatchedPairs, const bool bOnlyStereo)
{
const DBoW2::FeatureVector &vFeatVec1 = pKF1->mFeatVec;//关键帧1的特征向量
const DBoW2::FeatureVector &vFeatVec2 = pKF2->mFeatVec;//关键帧2的特征向量
// Compute epipole in second image
// 计算KF1的相机中心在KF2图像平面的坐标,即极点坐标
cv::Mat Cw = pKF1->GetCameraCenter(); // twc1
cv::Mat R2w = pKF2->GetRotation(); // Rc2w
cv::Mat t2w = pKF2->GetTranslation(); // tc2w
cv::Mat C2 = R2w*Cw+t2w; // tc2c1 KF1的相机中心在KF2坐标系的表示
const float invz = 1.0f/C2.at(2);
// 步骤0:得到KF1的相机光心在KF2中的坐标(极点坐标),即投影
const float ex =pKF2->fx*C2.at(0)*invz+pKF2->cx;
const float ey =pKF2->fy*C2.at(1)*invz+pKF2->cy;
// Find matches between not tracked keypoints查找未跟踪关键点之间的匹配
// Matching speed-up by ORB Vocabulary使用词袋加速
// Compare only ORB that share the same node只比较同一节点下的ORB
int nmatches=0;
vector vbMatched2(pKF2->N,false);
vector vMatches12(pKF1->N,-1);
vector rotHist[HISTO_LENGTH];
for(int i=0;ifirst对应node编号,f1it->second对应属于该node的所有特特征点编号
DBoW2::FeatureVector::const_iterator f1it = vFeatVec1.begin();
DBoW2::FeatureVector::const_iterator f2it = vFeatVec2.begin();
DBoW2::FeatureVector::const_iterator f1end = vFeatVec1.end();
DBoW2::FeatureVector::const_iterator f2end = vFeatVec2.end();
// 步骤1:遍历pKF1和pKF2中的node节点
while(f1it!=f1end && f2it!=f2end)
{
// 如果f1it和f2it属于同一个node节点
if(f1it->first == f2it->first)
{
// 步骤2:遍历该node节点下(f1it->first)的所有特征点
for(size_t i1=0, iend1=f1it->second.size(); i1second[i1];
// 步骤2.1:通过特征点索引idx1在pKF1中取出对应的MapPoint
MapPoint* pMP1 = pKF1->GetMapPoint(idx1);
// If there is already a MapPoint skip
// 由于寻找的是未匹配的特征点,所以pMP1应该为NULL
if(pMP1)
continue;
// 如果mvuRight中的值大于0,表示是双目,且该特征点有深度值
const bool bStereo1 = pKF1->mvuRight[idx1]>=0;
if(bOnlyStereo)
if(!bStereo1)
continue;
// 步骤2.2:通过特征点索引idx1在pKF1中取出对应的特征点
const cv::KeyPoint &kp1 = pKF1->mvKeysUn[idx1];
// 步骤2.3:通过特征点索引idx1在pKF1中取出对应的特征点的描述子
const cv::Mat &d1 = pKF1->mDescriptors.row(idx1);
int bestDist = TH_LOW;
int bestIdx2 = -1;
// 步骤3:遍历该node节点下(f2it->first)的所有特征点
for(size_t i2=0, iend2=f2it->second.size(); i2second[i2];
// 步骤3.1:通过特征点索引idx2在pKF2中取出对应的MapPoint
MapPoint* pMP2 = pKF2->GetMapPoint(idx2);
// If we have already matched or there is a MapPoint skip
// 如果pKF2当前特征点索引idx2已经被匹配过或者对应的3d点非空
// 那么这个索引idx2就不能被考虑
if(vbMatched2[idx2] || pMP2)
continue;
const bool bStereo2 = pKF2->mvuRight[idx2]>=0;
if(bOnlyStereo)
if(!bStereo2)
continue;
// 步骤3.2:通过特征点索引idx2在pKF2中取出对应的特征点的描述子
const cv::Mat &d2 = pKF2->mDescriptors.row(idx2);
// 计算idx1与idx2在两个关键帧中对应特征点的描述子距离
const int dist = DescriptorDistance(d1,d2);
if(dist>TH_LOW || dist>bestDist)
continue;
// 步骤3.3:通过特征点索引idx2在pKF2中取出对应的特征点
const cv::KeyPoint &kp2 = pKF2->mvKeysUn[idx2];
if(!bStereo1 && !bStereo2)
{
const float distex = ex-kp2.pt.x;
const float distey = ey-kp2.pt.y;
// 该特征点距离极点太近,表明kp2对应的MapPoint距离pKF1相机太近
if(distex*distex+distey*distey<100*pKF2->mvScaleFactors[kp2.octave])
continue;
}
// 步骤4:计算特征点kp2到kp1极线(kp1对应pKF2的一条极线)的距离是否小于阈值
if(CheckDistEpipolarLine(kp1,kp2,F12,pKF2))
{
bestIdx2 = idx2;
bestDist = dist;
}
}
// 步骤1、2、3、4总结下来就是:将左图像的每个特征点与右图像同一node节点的所有特征点
// 依次检测,判断是否满足对极几何约束,满足约束就是匹配的特征点
// 详见SearchByBoW(KeyFrame* pKF,Frame &F, vector &vpMapPointMatches)函数步骤4
if(bestIdx2>=0)
{
const cv::KeyPoint &kp2 = pKF2->mvKeysUn[bestIdx2];
vMatches12[idx1]=bestIdx2;
nmatches++;
if(mbCheckOrientation)
{
float rot = kp1.angle-kp2.angle;
if(rot<0.0)
rot+=360.0f;
int bin = round(rot*factor);
if(bin==HISTO_LENGTH)
bin=0;
assert(bin>=0 && binfirst < f2it->first)
{
f1it = vFeatVec1.lower_bound(f2it->first);
}
else
{
f2it = vFeatVec2.lower_bound(f1it->first);
}
}
if(mbCheckOrientation)
{
int ind1=-1;
int ind2=-1;
int ind3=-1;
ComputeThreeMaxima(rotHist,HISTO_LENGTH,ind1,ind2,ind3);
for(int i=0; i - Fuse(KeyFrame *pKF, const vector
&vpMapPoints, const float th)
| 函数功能 | 将MapPoints投影到关键帧pKF中,并判断是否有重复的MapPoints,1.如果MapPoint能匹配关键帧的特征点,并且该点有对应的MapPoint,那么将两个MapPoint合并(选择观测数多的),2.如果MapPoint能匹配关键帧的特征点,并且该点没有对应的MapPoint,那么为该点添加MapPoint |
| 参数说明 | |
| pKF | 相邻关键帧 |
| vpMapPoints | 当前关键帧的MapPoints |
| th | 搜索半径的因子 |
| 返回值 | 重复MapPoints的数量 |
int ORBmatcher::Fuse(KeyFrame *pKF, const vector &vpMapPoints, const float th)
{ //获取旋转R,和平移t
cv::Mat Rcw = pKF->GetRotation();
cv::Mat tcw = pKF->GetTranslation();
//获取相机内参
const float &fx = pKF->fx;
const float &fy = pKF->fy;
const float &cx = pKF->cx;
const float &cy = pKF->cy;
const float &bf = pKF->mbf;
//获取相机中心
cv::Mat Ow = pKF->GetCameraCenter();
int nFused=0;//重复MapPoints的数量
const int nMPs = vpMapPoints.size();
// 遍历所有的MapPoints
for(int i=0; iisBad() || pMP->IsInKeyFrame(pKF))
continue;
cv::Mat p3Dw = pMP->GetWorldPos();//获取MP在世界坐标系3D坐标
cv::Mat p3Dc = Rcw*p3Dw + tcw;//求取MP在相机坐标系下的坐标
// Depth must be positive深度值必须为正
if(p3Dc.at(2)<0.0f)
continue;
const float invz = 1/p3Dc.at(2);//1/z
const float x = p3Dc.at(0)*invz;//这几部都是投影公式,见SLAM14讲86页
const float y = p3Dc.at(1)*invz;
const float u = fx*x+cx;
const float v = fy*y+cy;// 步骤1:得到MapPoint在图像上的投影坐标
// Point must be inside the image
if(!pKF->IsInImage(u,v))//如果Point不在图片内
continue;
const float ur = u-bf*invz;//公式z=fb/d,d=ul-ur,这里ul即u
const float maxDistance = pMP->GetMaxDistanceInvariance();
const float minDistance = pMP->GetMinDistanceInvariance();
cv::Mat PO = p3Dw-Ow;
const float dist3D = cv::norm(PO);
// Depth must be inside the scale pyramid of the image深度必须在图像的尺度金字塔内
if(dist3DmaxDistance )
continue;
// Viewing angle must be less than 60 deg视角必须小于60度
cv::Mat Pn = pMP->GetNormal();
if(PO.dot(Pn)<0.5*dist3D)
continue;
int nPredictedLevel = pMP->PredictScale(dist3D,pKF);
// Search in a radius
const float radius = th*pKF->mvScaleFactors[nPredictedLevel];// 步骤2:根据MapPoint的深度确定尺度,从而确定搜索范围
const vector vIndices = pKF->GetFeaturesInArea(u,v,radius);
if(vIndices.empty())
continue;
// Match to the most similar keypoint in the radius与半径中最相似的关键点匹配
const cv::Mat dMP = pMP->GetDescriptor();
int bestDist = 256;
int bestIdx = -1;
for(vector::const_iterator vit=vIndices.begin(), vend=vIndices.end(); vit!=vend; vit++)// 步骤3:遍历搜索范围内的features
{
const size_t idx = *vit;
const cv::KeyPoint &kp = pKF->mvKeysUn[idx];
const int &kpLevel= kp.octave;
if(kpLevelnPredictedLevel)
continue;
// 计算MapPoint投影的坐标与这个区域特征点的距离,如果偏差很大,直接跳过特征点匹配
if(pKF->mvuRight[idx]>=0)
{
// Check reprojection error in stereo
const float &kpx = kp.pt.x;
const float &kpy = kp.pt.y;
const float &kpr = pKF->mvuRight[idx];
const float ex = u-kpx;
const float ey = v-kpy;
const float er = ur-kpr;
const float e2 = ex*ex+ey*ey+er*er;
if(e2*pKF->mvInvLevelSigma2[kpLevel]>7.8)
continue;
}
else
{
const float &kpx = kp.pt.x;
const float &kpy = kp.pt.y;
const float ex = u-kpx;
const float ey = v-kpy;
const float e2 = ex*ex+ey*ey;
// 基于卡方检验计算出的阈值(假设测量有一个像素的偏差)
if(e2*pKF->mvInvLevelSigma2[kpLevel]>5.99)
continue;
}
const cv::Mat &dKF = pKF->mDescriptors.row(idx);
const int dist = DescriptorDistance(dMP,dKF);
if(distGetMapPoint(bestIdx);
if(pMPinKF)// 如果这个点有对应的MapPoint
{
if(!pMPinKF->isBad())// 如果这个MapPoint不是bad,选择哪一个呢?哪个观测的多选哪一个
{
if(pMPinKF->Observations()>pMP->Observations())
pMP->Replace(pMPinKF);
else
pMPinKF->Replace(pMP);
}
}
else// 如果这个点没有对应的MapPoint,那么为该点添加MapPoint
{
pMP->AddObservation(pKF,bestIdx);
pKF->AddMapPoint(pMP,bestIdx);
}
nFused++
}
}
return nFused;
}
- Fuse(KeyFrame *pKF, cv::Mat Scw, const vector
&vpPoints, float th, vector &vpReplacePoint)
| 函数功能 | 投影MapPoints到KeyFrame中,并判断是否有重复的MapPoints |
| 参数说明 | |
| pKF | 相邻关键帧 |
| Scw | Scw为世界坐标系到pKF机体坐标系的Sim3变换,用于将世界坐标系下的vpPoints变换到机体坐标系 |
| vpPoints | 当前关键帧的MapPoints |
| th | 搜索半径的因子 |
| vpReplacePoint | 记录下来需要被替换掉的pMPinKF |
| 返回值 | 重复MapPoints的数量 |
- SearchBySim3(KeyFrame *pKF1, KeyFrame *pKF2, vector
| 函数功能 | 通过Sim3变换,确定pKF1的特征点在pKF2中的大致区域,同理,确定pKF2的特征点在pKF1中的大致区域,在该区域内通过描述子进行匹配捕获pKF1和pKF2之前漏匹配的特征点,更新vpMatches12(之前使用SearchByBoW进行特征点匹配时会有漏匹配) |
| 参数说明 | |
| pKF1 | 关键帧1 |
| pKF2 | 关键帧2 |
| vpMatches12 | 存储匹配特征点对,特征点用其在关键帧中的索引表示 |
| s12 | 尺度 |
| R12 | 1到2的旋转矩阵 |
| t12 | 1到2的平移 |
| th | 搜索半径的因子 |
| 返回值 | 重复MapPoints的数量 |
| 步骤 | 1.通过Sim变换,确定pKF1的特征点在pKF2中的大致区域,在该区域内通过描述子进行匹配捕获pKF1和pKF2之前漏匹配的特征点,更新vpMatches12(之前使用SearchByBoW进行特征点匹配时会有漏匹配) 2.通过Sim变换,确定pKF2的特征点在pKF1中的大致区域,在该区域内通过描述子进行匹配捕获pKF1和pKF2之前漏匹配的特征点,更新vpMatches12 3. |
- SearchByProjection(Frame &CurrentFrame, const Frame &LastFrame, const float th, const bool bMono)
| 函数功能 | 上一帧中包含了MapPoints,对这些MapPoints进行tracking,由此增加当前帧的MapPoints, |
| LastFrame | 上一帧 |
| th | 阈值 |
| bMono | 是否为单目 |
| 返回值 | 成功匹配的数量 |
| 步骤 | 1. 将上一帧的MapPoints投影到当前帧(根据速度模型可以估计当前帧的Tcw) 2. 在投影点附近根据描述子距离选取匹配,以及最终的方向投票机制进行剔除 |
由于代码和上面函数基本类似,此处不再粘贴!
以上,结束。