矩阵论中的常见概念
学校时候学的线性代数都忘光了,总结一下常用的东西
《1》矩阵的行列式
- where In is the n × n identity matrix.
- For square matrices A and B of equal size,
- for an n × n matrix.
- If A is a triangular matrix, i.e. ai,j = 0 whenever i > j or, alternatively, whenever i < j, then its determinant equals the product of the diagonal entries:
Let A be an arbitrary n×n matrix of complex numbers with eigenvalues , , … ,
.
The trace tr(A) is by definition the sum of the diagonal entries of A and also equals the sum of the eigenvalues.
《2》矩阵的逆
an n-by-n square matrix A is called invertible (also nonsingular or nondegenerate) if there exists an n-by-n square matrix B such that
(定义)
矩阵可逆,又叫矩阵非奇异; 不可逆,又叫矩阵奇异。
A square matrix is singular if and only if det A =0.
Non-square matrices (m-by-n matrices for which m ≠ n) do not have an inverse. However, in some cases such a matrix may have a left inverse (左逆)or right inverse(右逆). If A is m-by-n and the rank of A is equal to n, then A has a left inverse: an n-by-m matrix B such that BA = In. If A has rank m, then it has a right inverse: an n-by-m matrix B such that AB = Im.
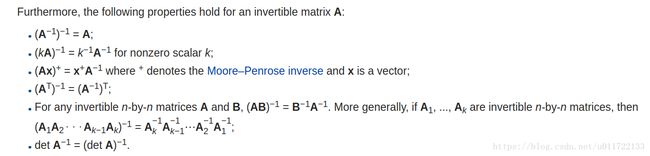
《2.1》逆的性质
det A ≠ 0.
rank A = n.
equation Ax = b has exactly one solution for each b.
The columns of A are linearly independent.
The transpose AT is an invertible matrix .
两个线性无关的特征向量:两个特征向量不成倍数关系,或者说特征向量对应的特征值不相等。
可对角化:An n × n matrix A is diagonalizable if and only if the sum of the dimensions of the eigenspaces is n. Or, equivalently, if and only if A has n linearly independent eigenvectors. 当矩阵可对角化的时候,才可以对矩阵进行特征值分解 (Eigen decomposition)
对于不可对角化的方阵,可以进行 Jordan 分解,there is an invertible matrix P such that A = PJP−1 . Jordan 分解是特征值分解的一般化形式。
《2.2》逆的求解
1. LU decomposition which generates upper and lower triangular matrices which are easier to invert
2. Eigen decomposition:If matrix A can be eigendecomposed 且if none of its eigenvalues are zero, then A is invertible and its inverse is given by
where Q is the square (N×N) matrix whose ith column is the eigenvector of A and Λ is the diagonal matrix whose diagonal elements are the corresponding eigenvalues, i.e., . Furthermore, because Λ is a diagonal matrix, its inverse is easy to calculate:
3.Cholesky decomposition
If matrix A is positive definite, then its inverse can be obtained as
where L is the lower triangular Cholesky decomposition of A, and L* denotes the conjugate transpose(共轭转置)of L.
《3》分块矩阵的逆
If a matrix is partitioned into four blocks, it can be inverted blockwise as follows:
where A, B, C and D have arbitrary size. (A and D must be square, so that they can be inverted. Furthermore, A and D−CA−1B must be nonsingular.[6])
Equivalently,
《4》正交矩阵 Orthogonal matrix
In linear algebra, an orthogonal matrix or real orthogonal matrix is a square matrix with real entries whose columns and rows are orthogonal unit vectors (i.e., orthonormal vectors), i.e.
性质:
各行是单位向量且两两正交;
各列是单位向量且两两正交;
行列式为1,或者 -1;
《5》酉矩阵:Unitary Matrix,正交矩阵复数域的推广
In mathematics, a complex square matrix U is unitary if its conjugate transpose U∗ is also its inverse – that is, if
- |det(U)| = 1.
《6》共轭转置矩阵 Conjugate transpose
In mathematics, the conjugate transpose or Hermitian transpose of an m-by-n matrix A with complex entries is the n-by-m matrix A∗ obtained from A by taking the transpose and then taking the complex conjugate of each entry (i.e., negating their imaginary parts but not their real parts). The conjugate transpose is formally defined by:
The complex conjugate of , where a and b are reals, is
or , commonly used in linear algebra
《7》艾尔米特矩阵:
=A,即A的共轭转置矩阵等于它本身
显然埃尔米特矩阵是实对称阵的推广。
《8》正定矩阵Positive-definite matrix,半正定矩阵 positive semi-definite:
一个n× n的艾尔米特矩阵M是正定的,当且仅当对于每个非零的复向量z,都有z*Mz > 0,则称M为正定矩阵,其中z* 表示z的共轭转置矩阵。当z*Mz > 0弱化为z*Mz≥0时,称M是半正定矩阵
判定定理1:对称阵A为正定的充分必要条件是:A的特征值全为正。
判定定理2:对称阵A为正定的充分必要条件是:A的各阶顺序主子式都为正。
判定定理3:任意阵A为正定的充分必要条件是:A合同于单位阵。
性质:
1.若A为n阶对称正定矩阵,则存在唯一的主对角线元素都是正数的下三角阵L,使得A=L*L′,此分解式称为 正定矩阵的楚列斯基(Cholesky)分解。
2.若A为n阶正定矩阵,则A为n阶可逆矩阵。
半正定矩阵的充分必要条件是:A的特征值非负,即全大于等于0.
《9》二次型
More generally, any quadratic function from Rn to R can be written as xTMx + xTb + c where M is a symmetric n × n matrix, b is a real n-vector, and c a real constant. This quadratic function is strictly convex when M is positive definite, and hence has a unique finite global minimum, if and only if M is positive definite.For this reason, positive definite matrices play an important role in optimization problems.