- Pixhawk源码笔记五:存储与EEPROM管理
zhouxinlin2009
这里,我们对APMEEPROM存储接口进行讲解。如有问题,可以交流
[email protected]。新浪@WalkAnt,转载本博客文章,请注明出处,以便更大范围的交流,谢谢。第六部分存储与EEPROM管理详细参考:http://dev.ardupilot.com/wiki/learning-ardupilot-storage-and-eeprom-management/用户参数、航点、集结点、地图
- ArduPilot + Gazebo + Mavros + QGC+遥控器控制实践
我叫蜈蚣你记住
无人机机器人
本文记录了ArduPilot+Gazebo+Mavros+QGC+遥控器的仿真环境配置过程,通过Guided模式控制四旋翼无人机以当前位置为圆心画圆。目录1ArduPilotSITL(SoftwareInTheLoop)环境搭建1.1ArduPilot编译环境安装1.2ROS一键安装1.3Gazebo安装1.4Mavros安装及配置1.5接入遥控器1.6实例:画圆2实机测试环境:Ubuntu20.
- ardupilot飞控的控制层级及其相应的文件所在
森焱森
单片机c语言算法
ardupilot采用了级联式PID,我认为级联式可以简单理解为串联,串联中混杂着并联,本质来说控制的上层的输入作为下层的输出。在ArduPilot中,各个控制层级分别对应不同的文件或模块,以下是各层级在ArduPilot文件结构中的具体位置说明:1.位置控制层•文件位置:ArduCopter/PositionControl.cpp和ArduCopter/PositionControl.h•作用:
- 开源飞控软件:推动无人机技术进步的引擎
老猿讲编程
开源无人机
在过去的二十年里,众多开源自动驾驶仪项目极大地推动了无人机技术的发展。像MatrixPilot、Baseflight、TauLabs、OpenPilot、Cleanflight、MultiWii和dRonin等一些开源自动驾驶仪项目已经停止开发,然而,Ardupilot/APM、Pixhawk/PX4、Paparazzi、LibrePilot、Betaflight和iNAV等项目至今仍具有重要意义
- ardupilot罗盘校准代码分析
魔城烟雨
ardupilot学习
目录文章目录目录摘要第一节:原理图学习第二节:飞控代码学习如何启动罗盘校准?1.通过地面站开启罗盘校准2.通过遥控器开启罗盘校准第三节:如何获取采样数据?第四节:如何进行罗盘校准?第五节:校准后的偏移量如何参与计算偏航第六节:如何提示校准数据到地面站1.发送校准进程2.发送校准结果摘要本节主要学习ardupilot如何实现罗盘校准,采用的飞控硬件是pixhawk_v5,软件代码版本3.6.8,欢迎
- MAVLink 通信协议简介:无人机与机器人系统的轻量级解决方案
爱素颜的露西
无人机机器人
MAVLink是一种轻量级、二进制的消息传输协议,广泛应用于无人机和机器人系统中,用于系统与控制台或地面站之间的通信。MAVLink的全称是MicroAirVehicleLink,它最早由LorenzMeier在2009年开发,并逐渐成为开源无人机控制软件如PX4和ArduPilot的标准通信协议。MAVLink的设计特点包括:轻量级:MAVLink消息使用小于255字节的包,因此非常适合带宽有限
- (11)电调和电机
EmotionFlying
【电调和电机】电调和电机CopterArduPilot
文章目录前言1电机2无刷电机ESC2.1协议2.2使用BLHeli32或BLHeli-S配置固件的ESC2.3遥测3ESC接线和大型QuadPlaneESC问题前言ArduPilot支持各种ESC、电机和电子燃油系统。以下页面提供了最流行类型的设置说明。ArduPilot支持各种ESC、电机和电子燃油系统。以下页面提供了最流行类型的设置说明。1电机
- ArduPilot第6章 电机模块解析
axzg
算法
文章目录前言一、rollpitchyawthrotttle二、rc_in()和rc_out()初始化1.Copter::init_ardupilot()2.init_rc_in()3.init_rc_out()三、电机初始化1.MULTICOPTER_FRAME2.AP_MotorsMulticopter3.AP_MOTORS_MAX_NUM_MOTORS4.AP_MotorsMatrix5.sc
- Ardupilot开源无人机之Geek SDK进展2025Q1
lida2003
ArduPilotLinux开源无人机穿越机
Ardupilot开源无人机之GeekSDK进展2025Q11.源由2.内容汇总2.1【jetson-fpv】YOLOINT8+coco8dataset精度降级2.2【OpenIPC-Configurator】OpenIPCConfigurator固件升级失败2.3【OpenIPC-Adaptive-link】OpenIPCRF信号质量相关显示2.4【OpenIPC-msposd】.srt/.os
- 掌握无人机自主起飞:深入解析ROS2节点实现(Ardupilot+ROS2+Gazebo+Mavros仿真)
xehuosh
无人机python机器人linux信息与通信开发语言
一:ROS2与MAVROSROS2是一个用于机器人软件开发的开源框架,它提供了一套丰富的工具和库,使得开发者能够快速构建复杂的机器人应用程序。ROS2可以通过Mavros插件包与无人机的飞行控制系统进行通信,实现了对无人机的精确控制。目前网上基于ROS2的Mavros教程极少,且几乎都是针对PX4固件的,这无疑增大了Arudupilot、ROS2和Mavros的学习困难。PX4官网的ROS1dem
- OpenIPC开源FPV之msposd配置
lida2003
LinuxOpenIPC开源单片机嵌入式硬件无人机
OpenIPC开源FPV之msposd配置1.源由2.状态3.步骤3.1Step1:下载/更新OpenIPC摄像头固件3.2Step2:下载最新的`msposd`可执行文件3.3Step3:下载各参数`icon`图标3.4Step4:修改`/etc/init.d/S98datalink`配置3.5Step5:修改`/etc/datalink.conf`3.6Step6:设置Ardupilot串口协
- iNav开源代码之研读分析篇章目录梳理
lida2003
xFlightiNavFlightControl
iNav开源代码之研读分析篇章目录梳理1.源由2.基础篇章3.代码篇章4.场景篇章5.异常篇章6.总结7.参考资料1.源由之前有介绍过Betaflight/PX4/ArduPilot,虽然iNav代码和Betaflight类似,但是针对iNav系列的没有整理过一个总的目录。今天打算也整理下,以便后续入手查找资料、梳理要点更加方便。2.基础篇章iNav飞控AOCODARC-F7MINI固件编译iNa
- gcc-arm-none-eabi工具链接集合
G
arm
gcc-arm-none-eabi编译工具链集合下载连接ArduPilotfirmware:/Tools/STM32-tools
- Raspbian简易RTSP服务
lida2003
Linux计算机视觉RTSP
Raspbian简易RTSP服务1.源由2.搭建简易RTSP服务器2.1系统安装2.2软件安装2.3命令介绍2.3.1libcamera-hello2.3.2libcamera-vid2.3.3cvlc3.实测4.参考资料1.源由鉴于前期的一些准备工作:《ArduPilot开源飞控之CompanionComputers简单分析》《ArduPilot开源代码之CompanionComputer上天计
- pixhawk自动降落控制静电吸附装置
Toby不写代码
pixhawk飞控单片机嵌入式硬件
1.使用固件:apm2.使用场景:无人机携带静电吸附装置,降落到被吸附物上方,pixhawk输出信号,使静电吸附装置通电产生吸力吸起被吸附物2.控制思路:定义一个标志变量,这个变量用来决定是否输出信号,初始化为假,当判断到无人机已经位于目标物上方,将无人机降落,并且置为真,同时飞控输出信号3.固件修改:(1)对应文件位置:..\ardupilot-master\ArduCopter\Copter.
- (2)(2.13) Rockblock Satellite Modem
EmotionFlying
【遥测无线电】开源无人机遥测无线电CopterArduPilot
文章目录前言1支持的MAVLink命令信息2设置3使用方法4数据成本5参数前言!Note该功能仅适用于ArduPilot4.4或更高版本,并且要求飞行控制器支持LUA脚本(LUAScripts)。RockBLOCK卫星调制解调器可实现与ArduPilot飞行器的全球(包括极地)MAVLink连接。它使用铱星SBD数据服务(IridiumSBDdataservice)。由于RockBLOCK的数据传
- ardupilot开发 --- 相机参数标定 篇
干了这碗汤
Ardupilot
参考https://zhuanlan.zhihu.com/p/587858107?utm_id=01.一些概念内参外参相机在计算机视觉方面的一些应用一般需要相机标定。我们总是听到标定这个词,那么具体标定的是什么呢?相机的拍摄是一个三维到二维(透视投影)的过程,这个过程可以用数学模型去表述,标定便是计算这个数学模型中的参数,我们最终希望通过这些参数能够从二维的图像去还原三维的世界。摄影的过程,其实计
- ardupilot开发 --- RTSP多媒体数据流(视频流) 篇
干了这碗汤
Ardupilot
0.一些概念RTSP是TCP/IP协议体系中的一个应用层协议,该协议定义了一对多应用程序如何有效地通过IP网络传送多媒体数据。RTSP在体系结构上位于RTP和RTCP之上,它使用TCP或UDP完成数据传输。在missionplanner中查看(拉取)RTSP视频流
- 基于Pixhawk和ROS搭建自主无人车(五):SLAM导航篇
Robot_Yue
嵌入式RPLiDARCartographerROSMAVROSPixhawk自主导航
参考PX4AutopilotUserGuideArduPilotDocumentation基于Pixhawk和ROS搭建自主无人车(文章链接汇总)1.硬件平台2.环境搭建2.1创建工作空间$cd$mkdir-pmav_ws/src$cdmav_ws$catkin_init_workspaceROS命令catkin_init_workspace分析2.2安装RPLiDAR包$cd~/mav_ws/s
- 无人机调试开源软件
道亦无名
小项目无人机
无人机调试开源软件有以下几个:MissionPlanner:一款功能丰富的开源软件,支持多种无人机,包括固定翼、多旋翼和直升机。它提供了实时的飞行数据监控、地图导航、任务规划以及详细的参数调整选项。APMPlanner2.0:专为ArduPilot自动驾驶仪设计的调参工具,具备直观的图形界面,简化了复杂的配置过程。用户可以轻松设置飞行模式、电机方向、遥控器映射等,同时实时查看飞行状态。OpenDr
- ardupilot 飞机的关键参数设置(电池+电机+滤波器)
魔城烟雨
ardupilot学习算法mcu单片机线性代数
目录文章目录目录摘要0.序言1.电池设置2.电机初始化设置3.PID控制器初始设置摘要本节主要记录自己学习ardupilot官网给的飞控关键参数的选择,欢迎批评指正!!!,主要参考SettingtheAircraftUpforTuning0.序言调整设置飞机的参数以下参数应根据您的飞机规格正确设置。每一个都会影响调整过程的质量。1.电池设置这是非常重要的确保垂直起降电机的推力曲线尽可能线性。线性推
- ArduPilot之开源代码电压/电流校准
lida2003
ArduPilotautopilot
ArduPilot之开源代码电压/电流校准1.源由2.校准公式2.1电压校准2.2电流校准3.校准参数3.1电压参数3.2电流参数4.实例校准4.1电压校准4.2电流校准5.参考资料1.源由关于inav/betaflight做了电压、电流的校准后,再来看Ardupilot的电流电压校准就比较容易,因为校准的原理都是类似的。【1】BetaFlight开源代码之电压校准【2】BetaFlight开源代
- Ardupilot开源飞控之VTOL之旅:打印件清单
lida2003
ArduPilotDIYDrones开源autopilot
Ardupilot开源飞控之VTOL之旅:打印件清单1.源由2.清单2.1模拟VTX打印件2.2摄像头打印件2.3GPS&RC天线打印件2.4飞控&电调打印件3.总结4.参考资料1.源由VTOL一直仍在角落吃灰,主要还是手头缺点经费,搞台3D打印机基本上就能解决问题。根据之前计划的配件规格、各种试装问题,重新整理下T1-VTOL需要的配件清单。Ardupilot开源飞控之VTOL之旅:配件试装Ar
- ArduPilot开源代码之CompanionComputer上天计划
lida2003
DIYDronesArduPilotLinuxraspberrypiautopilot开源
ArduPilot开源代码之CompanionComputer上天计划1.源由2.上天计划2.1机械结构2.2电子硬件2.3系统软件3.整合构想4.打印件4.1XT60支架4.2树莓派支架4.3摄像头支架5.参考资料1.源由在开源代码的熏陶下,在经济蒸蒸日上的大环境下,找不到工作,搞个伴机电脑上天,实现(航模+遥控+眼镜+地面站+RTSP视频流)空地一体四轴航模飞行器。现在到处管控的是飞行器,那就
- 加速下载ardupilot工程
wenbodong
ardupilot移植经验分享嵌入式单片机rtosc语言github
本文是从Ardupilot移植经验分享(1)中拆分出来,因为原文的篇幅太长了。本文中有时会提到“前面的步骤”、“之前”,这指的都是前一篇文章。目录下载ardupilot创建子模块的镜像仓库install-prereqs-ubuntu.sh加速方法小结遗漏了一些子模块在国内访问github的速度是受到限制的,下载大型工程时,容易失败。有加速通道的同学,就不必看了。ardupilot是一个大型且复杂的
- ardupilot开发 --- ROS 篇
干了这碗汤
Ardupilot
0.前言关于ROS/ROS2;1.ROS/ROS21.1概念碎片LTS:longtermsupport,一般指长期支持的版本;LTS版本意味着更稳定,Latest版本意味着键兼更多的platforms和拥有更新更多的ROSpackages;尽管已经有了LTS版本,每年还是会发布新版本;ROS版本与操作系统版、工具包版本(如QT、PCL、openCV等)、软件版本等相关性很大,建议新手使用推荐的ti
- ardupilot开发 --- 旋转关系 篇
干了这碗汤
Ardupilot
两个FRU坐标系的旋转关系、矩阵--两个FRU坐标系的z轴旋转关系,绕正z轴旋转anglefunctionrotateZ(x,y,z,angle_deg)localrot_x,rot_y,rot_zlocalangle_rad=math.rad(angle_deg)rot_x=x*math.cos(angle_rad)-y*math.sin(angle_rad)rot_y=x*math.sin(a
- ardupilot开发 --- 固件定制(OEM) 篇
干了这碗汤
Ardupilot
0.前言固件功能定制OEMCustomization:原厂设备制造商OEM(OriginalEquipmentManufacturer)、代工功能勾选参数预设固件名称自定义1.基于某个飞控硬件来定制自己的飞控产品可以自定义的包括:固件名称、预设参数、lua脚本内嵌、文件内嵌、宏定义开启或关闭、功能使能等等…以雷迅的CUAV-X7为例。步骤复制目录libraries/AP_HAL_ChibiOS/h
- APM无人机软件在环仿真环境搭建
wbzhang233
自主避障linux
题记:最近做毕业设计得用到无人机仿真,重操旧业,搞一搞SITL仿真。给个传送门参考:无人机SITL仿真APM软件在环仿真我的环境:ubuntu18.04虚拟机1.官方教程ardupilot官网和官方git帐号,里面有很多东西可以学习。APM官方教程APM官方gitAmovLab案例1)先安装编译环境,SettinguptheBuildEnvironment;具体步骤如下:#1.更新并安装gitsu
- 一文搞定px4、ardupilot mavlink软件协议
L菌的小跟班
通讯自动驾驶数据挖掘机器学习自然语言处理深度学习
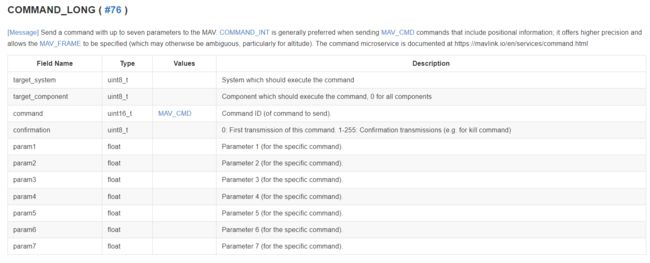
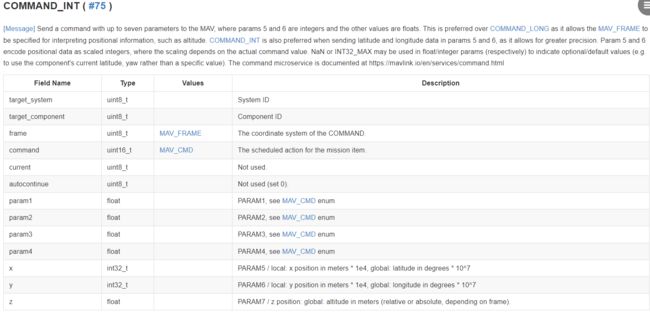
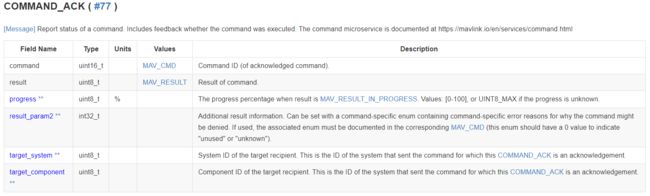
搞开源无人机的朋友最耳熟能详的莫过于它的通讯协议MAVLINK了。Mavlink----一个又好气又好笑的名词,仿佛自带光环,它一出场,就会附带两个小弟:ros、mavros。网络上mavros免费的课程一大堆,mavlink的倒是少之又少。很多人都会形成一种观念,难道是因为mavros要简单些?今天L君要告诉你们,其实直接使用mavlink比使用mavros简单的多啦。对于一个老程序员来说,理解
- 继之前的线程循环加到窗口中运行
3213213333332132
javathreadJFrameJPanel
之前写了有关java线程的循环执行和结束,因为想制作成exe文件,想把执行的效果加到窗口上,所以就结合了JFrame和JPanel写了这个程序,这里直接贴出代码,在窗口上运行的效果下面有附图。
package thread;
import java.awt.Graphics;
import java.text.SimpleDateFormat;
import java.util
- linux 常用命令
BlueSkator
linux命令
1.grep
相信这个命令可以说是大家最常用的命令之一了。尤其是查询生产环境的日志,这个命令绝对是必不可少的。
但之前总是习惯于使用 (grep -n 关键字 文件名 )查出关键字以及该关键字所在的行数,然后再用 (sed -n '100,200p' 文件名),去查出该关键字之后的日志内容。
但其实还有更简便的办法,就是用(grep -B n、-A n、-C n 关键
- php heredoc原文档和nowdoc语法
dcj3sjt126com
PHPheredocnowdoc
<!doctype html>
<html lang="en">
<head>
<meta charset="utf-8">
<title>Current To-Do List</title>
</head>
<body>
<?
- overflow的属性
周华华
JavaScript
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd">
<html xmlns="http://www.w3.org/1999/xhtml&q
- 《我所了解的Java》——总体目录
g21121
java
准备用一年左右时间写一个系列的文章《我所了解的Java》,目录及内容会不断完善及调整。
在编写相关内容时难免出现笔误、代码无法执行、名词理解错误等,请大家及时指出,我会第一时间更正。
&n
- [简单]docx4j常用方法小结
53873039oycg
docx
本代码基于docx4j-3.2.0,在office word 2007上测试通过。代码如下:
import java.io.File;
import java.io.FileInputStream;
import ja
- Spring配置学习
云端月影
spring配置
首先来看一个标准的Spring配置文件 applicationContext.xml
<?xml version="1.0" encoding="UTF-8"?>
<beans xmlns="http://www.springframework.org/schema/beans"
xmlns:xsi=&q
- Java新手入门的30个基本概念三
aijuans
java新手java 入门
17.Java中的每一个类都是从Object类扩展而来的。 18.object类中的equal和toString方法。 equal用于测试一个对象是否同另一个对象相等。 toString返回一个代表该对象的字符串,几乎每一个类都会重载该方法,以便返回当前状态的正确表示.(toString 方法是一个很重要的方法) 19.通用编程:任何类类型的所有值都可以同object类性的变量来代替。
- 《2008 IBM Rational 软件开发高峰论坛会议》小记
antonyup_2006
软件测试敏捷开发项目管理IBM活动
我一直想写些总结,用于交流和备忘,然都没提笔,今以一篇参加活动的感受小记开个头,呵呵!
其实参加《2008 IBM Rational 软件开发高峰论坛会议》是9月4号,那天刚好调休.但接着项目颇为忙,所以今天在中秋佳节的假期里整理了下.
参加这次活动是一个朋友给的一个邀请书,才知道有这样的一个活动,虽然现在项目暂时没用到IBM的解决方案,但觉的参与这样一个活动可以拓宽下视野和相关知识.
- PL/SQL的过程编程,异常,声明变量,PL/SQL块
百合不是茶
PL/SQL的过程编程异常PL/SQL块声明变量
PL/SQL;
过程;
符号;
变量;
PL/SQL块;
输出;
异常;
PL/SQL 是过程语言(Procedural Language)与结构化查询语言(SQL)结合而成的编程语言PL/SQL 是对 SQL 的扩展,sql的执行时每次都要写操作
- Mockito(三)--完整功能介绍
bijian1013
持续集成mockito单元测试
mockito官网:http://code.google.com/p/mockito/,打开documentation可以看到官方最新的文档资料。
一.使用mockito验证行为
//首先要import Mockito
import static org.mockito.Mockito.*;
//mo
- 精通Oracle10编程SQL(8)使用复合数据类型
bijian1013
oracle数据库plsql
/*
*使用复合数据类型
*/
--PL/SQL记录
--定义PL/SQL记录
--自定义PL/SQL记录
DECLARE
TYPE emp_record_type IS RECORD(
name emp.ename%TYPE,
salary emp.sal%TYPE,
dno emp.deptno%TYPE
);
emp_
- 【Linux常用命令一】grep命令
bit1129
Linux常用命令
grep命令格式
grep [option] pattern [file-list]
grep命令用于在指定的文件(一个或者多个,file-list)中查找包含模式串(pattern)的行,[option]用于控制grep命令的查找方式。
pattern可以是普通字符串,也可以是正则表达式,当查找的字符串包含正则表达式字符或者特
- mybatis3入门学习笔记
白糖_
sqlibatisqqjdbc配置管理
MyBatis 的前身就是iBatis,是一个数据持久层(ORM)框架。 MyBatis 是支持普通 SQL 查询,存储过程和高级映射的优秀持久层框架。MyBatis对JDBC进行了一次很浅的封装。
以前也学过iBatis,因为MyBatis是iBatis的升级版本,最初以为改动应该不大,实际结果是MyBatis对配置文件进行了一些大的改动,使整个框架更加方便人性化。
- Linux 命令神器:lsof 入门
ronin47
lsof
lsof是系统管理/安全的尤伯工具。我大多数时候用它来从系统获得与网络连接相关的信息,但那只是这个强大而又鲜为人知的应用的第一步。将这个工具称之为lsof真实名副其实,因为它是指“列出打开文件(lists openfiles)”。而有一点要切记,在Unix中一切(包括网络套接口)都是文件。
有趣的是,lsof也是有着最多
- java实现两个大数相加,可能存在溢出。
bylijinnan
java实现
import java.math.BigInteger;
import java.util.regex.Matcher;
import java.util.regex.Pattern;
public class BigIntegerAddition {
/**
* 题目:java实现两个大数相加,可能存在溢出。
* 如123456789 + 987654321
- Kettle学习资料分享,附大神用Kettle的一套流程完成对整个数据库迁移方法
Kai_Ge
Kettle
Kettle学习资料分享
Kettle 3.2 使用说明书
目录
概述..........................................................................................................................................7
1.Kettle 资源库管
- [货币与金融]钢之炼金术士
comsci
金融
自古以来,都有一些人在从事炼金术的工作.........但是很少有成功的
那么随着人类在理论物理和工程物理上面取得的一些突破性进展......
炼金术这个古老
- Toast原来也可以多样化
dai_lm
androidtoast
Style 1: 默认
Toast def = Toast.makeText(this, "default", Toast.LENGTH_SHORT);
def.show();
Style 2: 顶部显示
Toast top = Toast.makeText(this, "top", Toast.LENGTH_SHORT);
t
- java数据计算的几种解决方法3
datamachine
javahadoopibatisr-languer
4、iBatis
简单敏捷因此强大的数据计算层。和Hibernate不同,它鼓励写SQL,所以学习成本最低。同时它用最小的代价实现了计算脚本和JAVA代码的解耦,只用20%的代价就实现了hibernate 80%的功能,没实现的20%是计算脚本和数据库的解耦。
复杂计算环境是它的弱项,比如:分布式计算、复杂计算、非数据
- 向网页中插入透明Flash的方法和技巧
dcj3sjt126com
htmlWebFlash
将
Flash 作品插入网页的时候,我们有时候会需要将它设为透明,有时候我们需要在Flash的背面插入一些漂亮的图片,搭配出漂亮的效果……下面我们介绍一些将Flash插入网页中的一些透明的设置技巧。
一、Swf透明、无坐标控制 首先教大家最简单的插入Flash的代码,透明,无坐标控制: 注意wmode="transparent"是控制Flash是否透明
- ios UICollectionView的使用
dcj3sjt126com
UICollectionView的使用有两种方法,一种是继承UICollectionViewController,这个Controller会自带一个UICollectionView;另外一种是作为一个视图放在普通的UIViewController里面。
个人更喜欢第二种。下面采用第二种方式简单介绍一下UICollectionView的使用。
1.UIViewController实现委托,代码如
- Eos平台java公共逻辑
蕃薯耀
Eos平台java公共逻辑Eos平台java公共逻辑
Eos平台java公共逻辑
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
蕃薯耀 2015年6月1日 17:20:4
- SpringMVC4零配置--Web上下文配置【MvcConfig】
hanqunfeng
springmvc4
与SpringSecurity的配置类似,spring同样为我们提供了一个实现类WebMvcConfigurationSupport和一个注解@EnableWebMvc以帮助我们减少bean的声明。
applicationContext-MvcConfig.xml
<!-- 启用注解,并定义组件查找规则 ,mvc层只负责扫描@Controller -->
<
- 解决ie和其他浏览器poi下载excel文件名乱码
jackyrong
Excel
使用poi,做传统的excel导出,然后想在浏览器中,让用户选择另存为,保存用户下载的xls文件,这个时候,可能的是在ie下出现乱码(ie,9,10,11),但在firefox,chrome下没乱码,
因此必须综合判断,编写一个工具类:
/**
*
* @Title: pro
- 挥洒泪水的青春
lampcy
编程生活程序员
2015年2月28日,我辞职了,离开了相处一年的触控,转过身--挥洒掉泪水,毅然来到了兄弟连,背负着许多的不解、质疑——”你一个零基础、脑子又不聪明的人,还敢跨行业,选择Unity3D?“,”真是不自量力••••••“,”真是初生牛犊不怕虎•••••“,••••••我只是淡淡一笑,拎着行李----坐上了通向挥洒泪水的青春之地——兄弟连!
这就是我青春的分割线,不后悔,只会去用泪水浇灌——已经来到
- 稳增长之中国股市两点意见-----严控做空,建立涨跌停版停牌重组机制
nannan408
对于股市,我们国家的监管还是有点拼的,但始终拼不过飞流直下的恐慌,为什么呢?
笔者首先支持股市的监管。对于股市越管越荡的现象,笔者认为首先是做空力量超过了股市自身的升力,并且对于跌停停牌重组的快速反应还没建立好,上市公司对于股价下跌没有很好的利好支撑。
我们来看美国和香港是怎么应对股灾的。美国是靠禁止重要股票做空,在
- 动态设置iframe高度(iframe高度自适应)
Rainbow702
JavaScriptiframecontentDocument高度自适应局部刷新
如果需要对画面中的部分区域作局部刷新,大家可能都会想到使用ajax。
但有些情况下,须使用在页面中嵌入一个iframe来作局部刷新。
对于使用iframe的情况,发现有一个问题,就是iframe中的页面的高度可能会很高,但是外面页面并不会被iframe内部页面给撑开,如下面的结构:
<div id="content">
<div id=&quo
- 用Rapael做图表
tntxia
rap
function drawReport(paper,attr,data){
var width = attr.width;
var height = attr.height;
var max = 0;
&nbs
- HTML5 bootstrap2网页兼容(支持IE10以下)
xiaoluode
html5bootstrap
<!DOCTYPE html>
<html>
<head lang="zh-CN">
<meta charset="UTF-8">
<meta http-equiv="X-UA-Compatible" content="IE=edge">