- Cartographer_01: 使用CLion配置Cartographer_Superbuild
鬼马汤圆
cartographerubuntudebug
使用CLion配置Cartographer_Superbuild笔者计算机新手,尝试使用CLiondebugCartographer,其间遇到多方困难,最后使用github上一位大佬写的Cartographer_Superbuild成功debug。特此记录,以防忘记。首先,配置,操作系统:Ubuntu18.04LTSRos:MelodicIDE:CLion2020.2.4debug代码:Carto
- 移动机器人激光SLAM导航(五):Cartographer SLAM 篇
Robot_Yue
自主探索导航学习SLAMCartographer工程化调参
参考Cartographer官方文档Cartographer从入门到精通1.Cartographer安装1.1前置条件推荐在刚装好的Ubuntu16.04或Ubuntu18.04上进行编译ROS安装:ROS学习1:ROS概述与环境搭建1.2依赖库安装资源下载完解压并执行以下指令https://pan.baidu.com/s/1LWqZ4SOKn2sZecQUDDXXEw?pwd=j6cf$sudo
- 1.QT刷新ROS地图画面时,地图画面时不时卡住,甚至整个界面挂掉退出
Master Cui
各种问题解决linuxqtROSslamros
一、问题背景和描述最近用QT实现一个地图刷新的功能,主要的过程就是通过ros的发布订阅机制来接收cartographer发布的map数据,收到map数据后,利用qt中的绘图相关的类进行实时描绘。功能实现后,测试时发现一下几个问题:1、刷新地图的时候,地图画面出现闪烁的情况。2、地图刷新时,时不时程序直接退出,很不稳定。3、就算程序不退出,当建图区域过大时,会导致,地图刷新画面会卡死不动二、分析过程
- Cartographe纯雷达计算位姿的前后端总结
#君君#
深度学习人工智能
转载@梦凝小筑本人的研究方向为激光SLAM,因此对于GoogleCartographer的经典算法十分感兴趣,但是苦于该算法的论文是英文写作,且该论文有着公式多,解释少的特点。本人的研究方向为激光SLAM,因此对于GoogleCartographer的经典算法十分感兴趣,但是苦于该算法的论文是英文写作,且该论文有着公式多,解释少的特点。因此在看了原论文和网上的各种论文解读,都没有能够完全把这块硬骨
- Cartographer学习
laocui1
学习
官方文档:CompilingCartographerROS—CartographerROSdocumentation动手学ROS21、源码安装gitclonehttps://ghproxy.com/https://github.com/ros2/cartographer.git-bros2gitclonehttps://ghproxy.com/https://github.com/ros2/car
- ROS机器人操作系统AutolaborOS全面开源
Autolabor
AutolaborOSAutolaborSimulation模拟器ros机器人操作系统ROS机器人SLAM建图导航autolabor
还在为要不要装双系统纠结?为装不上ROS而烦恼?明明按照官方文档操作,为什么还一堆报错?安装AutolaborOS,和这些问题说再见。AutolaborOS是什么AutolaborOS由Autolabor推出的免费开源机器人操作系统,基于ubuntu18.04与ROSMelodic开发而成,包含ROSMelodic、常用ROS包(Cartographer、Gmapping、Navigation··
- cartographer编译失败
_无往而不胜_
rosninja-1.8ninjacartographerrulegenerate
cartographer编译失败cartographer在编译的过程中,报错:multiplerulesgenerateCMakeFiles/,提示编译pb.cc文件冲突;把ninja换成1.8版本。报错消失。Basepath:/home/sukai/workspace/0/137/cartographer_noetic/cartographer2022-07-11/cartographer_ws
- cartographer离线建图报错: reference_counts_.count(key) (1 vs. 0) Key ‘max_match_variety_distance‘ was used
_无往而不胜_
rosroscartographerreference
cartographer离线建图报错:reference_counts_.count(key)(1vs.0)Key'max_match_variety_distance'wasused[FATAL][1706178296.827084612]:F012518:24:56.00000021358lua_parameter_dictionary.cc:433]Checkfailed:1==refere
- cartographer离线建图报错:data_.trajectory_nodes.SizeOfTrajectoryOrZero
_无往而不胜_
新ros专栏roscartographertrajectory离线建图报错failed
cartographer离线建图报错:data_.trajectory_nodes.SizeOfTrajectoryOrZero[FATAL][1706177325.876019302,1706015603.398505596]:F012518:08:45.00000017607pose_graph_2d.cc:1314]Checkfailed:data_.trajectory_nodes.Siz
- ros2仿真学习04 -turtlebot3实现cartographer算法建图演示
小海聊智造
ROS2机器人人工智能ros2机器人机器人仿真人工智能
安装看这里https://blog.csdn.net/hai411741962/article/details/135619608?spm=1001.2014.3001.5502虚拟机配置:内存16gcpu4核磁盘40G,20G不够启动仿真ros2launchturtlebot3_gazeboturtlebot3_world.launch.py启动成功如下启动建图重新开一个命令窗口:ros2lau
- ROS2 仿真教程 基于humble版本机器人安装
小海聊智造
ROS2机器人人工智能ros2机器人人工智能机器人仿真
安装colcon编译工具sudoaptinstallpython3-colcon-common-extensions安装cartographer建图sudoaptinstallros-humble-cartographersudoaptinstallros-humble-cartographer-ros安装导航包sudoaptinstallros-humble-navigation2sudoapt
- Cartographer中的2D扫描匹配算法
方小生–
算法Cartographer2D激光雷达
Cartographer中的2D扫描匹配算法基础知识CeresSolver入门教程Ceres的Options详解原理公式待续。。。Cartographer中代码实现详细注释位置:cartographer_ws/src/cartographer/cartographer/mapping/internal/2d/scan_matching/ceres_scan_matcher_2d.cc#includ
- Cartographer(10)CeresScanMatcher2D
chilian12321
rosslam自动驾驶
CeresSolver:从入门到使用_非晚非晚的博客-CSDN博客_ceres核函数基本原理公式:LocalTrajectoryBuilder2D::ScanMatch--》ceres_scan_matcher_.Match/***@brief基于Ceres的扫描匹配**@param[in]target_translation预测出来的先验位置,只有xy*@param[in]initial_pos
- cartographer pure_localization 纯定位修改 +初始化位置
chilian12321
ros自动驾驶人工智能机器学习
1.demo_backpack_2d_localization.launch增加参数-pure_localization在cartographer_ros/cartographer_ros/cartographer_ros/occupancy_grid_node_main.cc文件修改:(可以替换)/**Copyright2016TheCartographerAuthors**Licensedun
- 童话般的冒险,清新脱俗的独立佳作—《Carto》
绘空之事
《Carto》(中文译名:无尽旅图)作为一款独立游戏,本作的流程并不长,总共10章的内容,大约5小时左右就能通关,它也不像那些商业味浓重的游戏那样堆砌各种要素,这款游戏的核心机制只有一个——拼图。也正是这样简单的游戏玩法吸引着我解开一个又一个谜题,和女主角卡朵一起在这片未知的世界中展开冒险。游戏简介《无尽旅图》英文名《Carto》源于英文"Cartographer"(制图师),熊孩子卡朵乱了天象不
- 0开始配置Cartographer建图和导航定位
方小生–
ROScartographer
0开始配置Cartographer日期:12-19硬件:激光雷达+IMU小车的tf变换:建图配置lua文件配置:my_robot.luainclude"map_builder.lua"include"trajectory_builder.lua"options={map_builder=MAP_BUILDER,trajectory_builder=TRAJECTORY_BUILDER,map_fr
- cartographer_ros使用
Shilong Wang
ROS算法
首先根据官方指导安装cartographer。然后创建ros工作空间并拉取cartographer_ros代码mkdir-pcarto_ws/srccdcarto_ws/srccatkin_init_workspacegitclonehttps://github.com/cartographer-project/cartographer_ros.git现在需要安装cartographer_ros依
- SLAM定位、重定位效果
AIMercs
ROSSLAM传感器机器人重定位定位cartographer
环境:办公室场景Intel(R)Core(TM)
[email protected]资源占用:进��USERPRNIVIRTRESSHR�%CPU%MEMTIME+COMMAND18164xxxx200123544811174820604S37.92.86:58.02cartographer效果:定位效果:cartographer定位全局重定位效果:cartographer全局重定位指定位姿效果
- 地下停车场的2Dslam建图、定位、重定位
AIMercs
机器人SLAM自动驾驶重定位cartographer
环境:办公室场景Intel(R)Core(TM)
[email protected]资源占用:进��USERPRNIVIRTRESSHR�%CPU%MEMTIME+COMMAND18164xxxx200123544811174820604S37.92.86:58.02cartographer效果:建图地下停车场建图-2DLidar定位2DSLAM顺建图方向定位2DSLAM逆建图方向定位重定位2D
- 日更挑战6-人类的本质是套娃
prophet__
这个话题源于今天知乎的一个问题,你怎么从专业领域说明人类的本质是套娃这件事。举个栗子说一说什么是套娃:一个年轻人对另一个年轻人说:你真是太年轻了。详细举栗前提:假设我们不知道测量的真实尺度(简称为ground_truth)有一天我要检测一个定位方式是否准确,现在我只有两种方案:反光板三角定位+cartographer地图匹配定位问题来了:在不知道什么是“准确”的情况下,如何验证哪个定位更加准确?是
- SLAM优秀开源工程最全汇总
蜗牛也疯狂_6104
1、CartographerCartographer是一个系统,可跨多个平台和传感器配置以2D和3D形式提供实时同时定位和制图(SLAM)。https://github.com/cartographer-project/cartographer2、Openvslam一个通用的视觉SLAM框架。OpenVSLAM是单眼,立体声和RGBD视觉SLAM系统。值得注意的功能是:它与各种类型的相机型号兼容,
- ROS小车(持续更新中---)
呜啦啦呜呼z
ROSubuntu机器人
无中生有:ROS无人小车一.Nvidiajetsonorinnano刷机二.ROS以及Cartographer安装三.MQTT通信(持续更新中---)四.激光里程计五.Cartographer之纯定位(持续更新中---)六.AMCL及Navigation调试经验(持续更新中---)七.路线记录一.Nvidiajetsonorinnano刷机本人设备:orinnano是8G版,安装NVMeSSD存储
- Cartographer安装及过程中出现的问题
BC!
slamroslinux自动驾驶
安装步骤1.更新sudoapt-getupdate2.依赖sudoapt-getinstall-y\cmake\g++\git\google-mock\libboost-all-dev\libcairo2-dev\libeigen3-dev\libgflags-dev\libgoogle-glog-dev\liblua5.2-dev\libsuitesparse-dev\libwebp-dev\n
- 控制实体小车cartographer建图
于小猿Sup
stm32嵌入式硬件单片机python
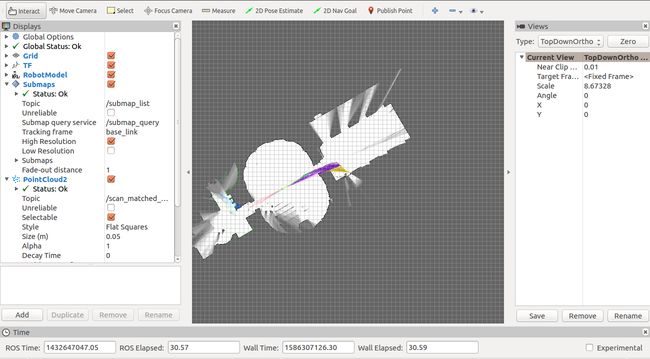
cartographer建图跑通官方例程下载官方baghttps://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag运行bagroslaunchcartographer_rosdemo_backpack_2d.launchbag_file
- cartographer源码学习笔记之CMakeLists.txt文件解读
干菜语录
cartographer学习笔记
1CMakeLists.txt的解释cmake_minimum_required(VERSION2.8.12)#ShipswithUbuntu14.04(Trusty)project(cartographer_ros)set(PACKAGE_DEPENDENCIEScartographer_ros_msgsgeometry_msgsmessage_runtimenav_msgspcl_conver
- Cartographer源码解析:D栅格地图、RayToPixelMask与贝汉明算法
代码创造之旅
算法编程
Cartographer是一种用于构建2D和3D栅格地图的开源SLAM(SimultaneousLocalizationandMapping)系统。它被广泛应用于机器人导航、自动驾驶和增强现实等领域。在Cartographer的源码中,有两个关键概念:D栅格地图和RayToPixelMask,以及使用的贝汉明算法。本文将详细解析这些概念,并提供相应的源代码实现。D栅格地图(D-gridMap)D栅
- Ubuntu18.04+Ros melodic安装cartographer
rain870814
自动驾驶人工智能机器学习
Rosmelodic安装参考Ubuntu18.04安装ros全过程及各种问题骨灰级解决方法_gjwjw的博客-CSDN博客本文cartographer安装主要参考cartographer环境建立以及建图测试(详细级)_良知犹存的博客-CSDN博客_cartographer编译cartographer过程中,出现各种编译问题,基本都是版本问题。所以请大家注意下载各个分包的版本,版本必须严格:eige
- ubuntu20.04(ros-noetic)编译cartographer出现undefined reference to `absl::lts_20211102问题的解决办法
CV陈智君
cartographerrosSLAMlinux运维服务器
最近需要在ubuntu20.04下编译cartographer,编译方法参照如下链接:CompilingCartographerROS—CartographerROSdocumentation在运行catkin_make_isolated--install--use-ninja后出现undefinedreferenceto`absl::lts_20211102等系列问题,排查后发现是absl库在编
- cartographer安装踩坑记录)
lelezhuxj
ROS资料Ubuntu相关资料工具
cartographer安装踩坑记录安装安装参考链接:官方安装指导过程Cartographer安装官网教程cartographer超详尽安装教程!安装教程安装教程https://zhuanlan.zhihu.com/p/100107552在走到编译这步时,执行指令catkin_make_isolated--install--use-ninja后,界面ceres报错,错误信息如下查找资料发现,该错误
- gflags和glog在cartographer中的运用
虾眠不觉晓,
SLAMcartographerjavac++servlet
gflags是什么?gflags是google开源的命令行标记处理库;那么什么是命令行标记呢?顾名思义就是当运行一个可执行文件时,由用户为其指定的标记,形如:fgrep-l-f./testcccjjj注意上述命令,-l与-f./test是命令行标记,而ccc与jjj是命令行参数,因为这两者不是以破折号开头的。一般的一个可执行文件,允许用户为其传入命令行标记以及参数,如上述例子,-l是一个不带参数的
- java杨辉三角
3213213333332132
java基础
package com.algorithm;
/**
* @Description 杨辉三角
* @author FuJianyong
* 2015-1-22上午10:10:59
*/
public class YangHui {
public static void main(String[] args) {
//初始化二维数组长度
int[][] y
- 《大话重构》之大布局的辛酸历史
白糖_
重构
《大话重构》中提到“大布局你伤不起”,如果企图重构一个陈旧的大型系统是有非常大的风险,重构不是想象中那么简单。我目前所在公司正好对产品做了一次“大布局重构”,下面我就分享这个“大布局”项目经验给大家。
背景
公司专注于企业级管理产品软件,企业有大中小之分,在2000年初公司用JSP/Servlet开发了一套针对中
- 电驴链接在线视频播放源码
dubinwei
源码电驴播放器视频ed2k
本项目是个搜索电驴(ed2k)链接的应用,借助于磁力视频播放器(官网:
http://loveandroid.duapp.com/ 开放平台),可以实现在线播放视频,也可以用迅雷或者其他下载工具下载。
项目源码:
http://git.oschina.net/svo/Emule,动态更新。也可从附件中下载。
项目源码依赖于两个库项目,库项目一链接:
http://git.oschina.
- Javascript中函数的toString()方法
周凡杨
JavaScriptjstoStringfunctionobject
简述
The toString() method returns a string representing the source code of the function.
简译之,Javascript的toString()方法返回一个代表函数源代码的字符串。
句法
function.
- struts处理自定义异常
g21121
struts
很多时候我们会用到自定义异常来表示特定的错误情况,自定义异常比较简单,只要分清是运行时异常还是非运行时异常即可,运行时异常不需要捕获,继承自RuntimeException,是由容器自己抛出,例如空指针异常。
非运行时异常继承自Exception,在抛出后需要捕获,例如文件未找到异常。
此处我们用的是非运行时异常,首先定义一个异常LoginException:
/**
* 类描述:登录相
- Linux中find常见用法示例
510888780
linux
Linux中find常见用法示例
·find path -option [ -print ] [ -exec -ok command ] {} \;
find命令的参数;
- SpringMVC的各种参数绑定方式
Harry642
springMVC绑定表单
1. 基本数据类型(以int为例,其他类似):
Controller代码:
@RequestMapping("saysth.do")
public void test(int count) {
}
表单代码:
<form action="saysth.do" method="post&q
- Java 获取Oracle ROWID
aijuans
javaoracle
A ROWID is an identification tag unique for each row of an Oracle Database table. The ROWID can be thought of as a virtual column, containing the ID for each row.
The oracle.sql.ROWID class i
- java获取方法的参数名
antlove
javajdkparametermethodreflect
reflect.ClassInformationUtil.java
package reflect;
import javassist.ClassPool;
import javassist.CtClass;
import javassist.CtMethod;
import javassist.Modifier;
import javassist.bytecode.CodeAtt
- JAVA正则表达式匹配 查找 替换 提取操作
百合不是茶
java正则表达式替换提取查找
正则表达式的查找;主要是用到String类中的split();
String str;
str.split();方法中传入按照什么规则截取,返回一个String数组
常见的截取规则:
str.split("\\.")按照.来截取
str.
- Java中equals()与hashCode()方法详解
bijian1013
javasetequals()hashCode()
一.equals()方法详解
equals()方法在object类中定义如下:
public boolean equals(Object obj) {
return (this == obj);
}
很明显是对两个对象的地址值进行的比较(即比较引用是否相同)。但是我们知道,String 、Math、I
- 精通Oracle10编程SQL(4)使用SQL语句
bijian1013
oracle数据库plsql
--工资级别表
create table SALGRADE
(
GRADE NUMBER(10),
LOSAL NUMBER(10,2),
HISAL NUMBER(10,2)
)
insert into SALGRADE values(1,0,100);
insert into SALGRADE values(2,100,200);
inser
- 【Nginx二】Nginx作为静态文件HTTP服务器
bit1129
HTTP服务器
Nginx作为静态文件HTTP服务器
在本地系统中创建/data/www目录,存放html文件(包括index.html)
创建/data/images目录,存放imags图片
在主配置文件中添加http指令
http {
server {
listen 80;
server_name
- kafka获得最新partition offset
blackproof
kafkapartitionoffset最新
kafka获得partition下标,需要用到kafka的simpleconsumer
import java.util.ArrayList;
import java.util.Collections;
import java.util.Date;
import java.util.HashMap;
import java.util.List;
import java.
- centos 7安装docker两种方式
ronin47
第一种是采用yum 方式
yum install -y docker
- java-60-在O(1)时间删除链表结点
bylijinnan
java
public class DeleteNode_O1_Time {
/**
* Q 60 在O(1)时间删除链表结点
* 给定链表的头指针和一个结点指针(!!),在O(1)时间删除该结点
*
* Assume the list is:
* head->...->nodeToDelete->mNode->nNode->..
- nginx利用proxy_cache来缓存文件
cfyme
cache
user zhangy users;
worker_processes 10;
error_log /var/vlogs/nginx_error.log crit;
pid /var/vlogs/nginx.pid;
#Specifies the value for ma
- [JWFD开源工作流]JWFD嵌入式语法分析器负号的使用问题
comsci
嵌入式
假如我们需要用JWFD的语法分析模块定义一个带负号的方程式,直接在方程式之前添加负号是不正确的,而必须这样做:
string str01 = "a=3.14;b=2.71;c=0;c-((a*a)+(b*b))"
定义一个0整数c,然后用这个整数c去
- 如何集成支付宝官方文档
dai_lm
android
官方文档下载地址
https://b.alipay.com/order/productDetail.htm?productId=2012120700377310&tabId=4#ps-tabinfo-hash
集成的必要条件
1. 需要有自己的Server接收支付宝的消息
2. 需要先制作app,然后提交支付宝审核,通过后才能集成
调试的时候估计会真的扣款,请注意
- 应该在什么时候使用Hadoop
datamachine
hadoop
原帖地址:http://blog.chinaunix.net/uid-301743-id-3925358.html
存档,某些观点与我不谋而合,过度技术化不可取,且hadoop并非万能。
--------------------------------------------万能的分割线--------------------------------
有人问我,“你在大数据和Hado
- 在GridView中对于有外键的字段使用关联模型进行搜索和排序
dcj3sjt126com
yii
在GridView中使用关联模型进行搜索和排序
首先我们有两个模型它们直接有关联:
class Author extends CActiveRecord {
...
}
class Post extends CActiveRecord {
...
function relations() {
return array(
'
- 使用NSString 的格式化大全
dcj3sjt126com
Objective-C
格式定义The format specifiers supported by the NSString formatting methods and CFString formatting functions follow the IEEE printf specification; the specifiers are summarized in Table 1. Note that you c
- 使用activeX插件对象object滚动有重影
蕃薯耀
activeX插件滚动有重影
使用activeX插件对象object滚动有重影 <object style="width:0;" id="abc" classid="CLSID:D3E3970F-2927-9680-BBB4-5D0889909DF6" codebase="activex/OAX339.CAB#
- SpringMVC4零配置
hanqunfeng
springmvc4
基于Servlet3.0规范和SpringMVC4注解式配置方式,实现零xml配置,弄了个小demo,供交流讨论。
项目说明如下:
1.db.sql是项目中用到的表,数据库使用的是oracle11g
2.该项目使用mvn进行管理,私服为自搭建nexus,项目只用到一个第三方 jar,就是oracle的驱动;
3.默认项目为零配置启动,如果需要更改启动方式,请
- 《开源框架那点事儿16》:缓存相关代码的演变
j2eetop
开源框架
问题引入
上次我参与某个大型项目的优化工作,由于系统要求有比较高的TPS,因此就免不了要使用缓冲。
该项目中用的缓冲比较多,有MemCache,有Redis,有的还需要提供二级缓冲,也就是说应用服务器这层也可以设置一些缓冲。
当然去看相关实现代代码的时候,大致是下面的样子。
[java]
view plain
copy
print
?
public vo
- AngularJS浅析
kvhur
JavaScript
概念
AngularJS is a structural framework for dynamic web apps.
了解更多详情请见原文链接:http://www.gbtags.com/gb/share/5726.htm
Directive
扩展html,给html添加声明语句,以便实现自己的需求。对于页面中html元素以ng为前缀的属性名称,ng是angular的命名空间
- 架构师之jdk的bug排查(一)---------------split的点号陷阱
nannan408
split
1.前言.
jdk1.6的lang包的split方法是有bug的,它不能有效识别A.b.c这种类型,导致截取长度始终是0.而对于其他字符,则无此问题.不知道官方有没有修复这个bug.
2.代码
String[] paths = "object.object2.prop11".split("'");
System.ou
- 如何对10亿数据量级的mongoDB作高效的全表扫描
quentinXXZ
mongodb
本文链接:
http://quentinXXZ.iteye.com/blog/2149440
一、正常情况下,不应该有这种需求
首先,大家应该有个概念,标题中的这个问题,在大多情况下是一个伪命题,不应该被提出来。要知道,对于一般较大数据量的数据库,全表查询,这种操作一般情况下是不应该出现的,在做正常查询的时候,如果是范围查询,你至少应该要加上limit。
说一下,
- C语言算法之水仙花数
qiufeihu
c算法
/**
* 水仙花数
*/
#include <stdio.h>
#define N 10
int main()
{
int x,y,z;
for(x=1;x<=N;x++)
for(y=0;y<=N;y++)
for(z=0;z<=N;z++)
if(x*100+y*10+z == x*x*x
- JSP指令
wyzuomumu
jsp
jsp指令的一般语法格式: <%@ 指令名 属性 =”值 ” %>
常用的三种指令: page,include,taglib
page指令语法形式: <%@ page 属性 1=”值 1” 属性 2=”值 2”%>
include指令语法形式: <%@include file=”relative url”%> (jsp可以通过 include