VS2013+PCL1.8.0+Opencv2.4.9+Kinect V2 点云的获取与显示
一、PCL 1.8.0 相关文件下载:
先到百度网盘下载安装和配置文件,开始成功配置了X64的,后来为了和自己32位的opencv匹配,改为了win32版本的;
属性表和相应的pdb.rar都下载下来。 https://pan.baidu.com/s/1Z2IGOAmizWfDa9Wt1mE9Gg
二、点击 PCL-1.8.0-AllInOne-msvc2013-win32.exe 运行
点击下一步、我接受、
add pcl to the system PATH for all users

选择安装位置,默认安装位置即可
点击安装完成,需要等几分钟,安装过程中会弹出安装openni的界面,这时一定要把安装路径改为
C:\Program Files (x86)\PCL 1.8.0\3rdParty\OpenNI2
三: 配置
step1 : 拷贝与你安装PCL版本对应的PDB压缩包解压后的PDB文件,到你PCL安装路径下的bin文件夹
也就是将,PCL-1.8.0-AllInOne-msvc2013-win32-pdb.rar 解压到 C:\Program Files (x86)\PCL 1.8.0\bin 目录下
step2 :更改环境变量,电脑右击属性-》高级系统设置-》环境变量-》path-》
添加如下环境变量:配置好环境变量后需要重启一下电脑
C:\Program Files (x86)\PCL 1.8.0\bin (这条如果有,就不需要再添加)
C:\Program Files (x86)\PCL 1.8.0\3rdParty\FLANN\bin
C:\Program Files (x86)\PCL 1.8.0\3rdParty\VTK\bin
C:\Program Files (x86)\PCL 1.8.0\3rdParty\Qhull\bin
C:\Program Files (x86)\PCL 1.8.0\3rdParty\OpenNI2\Tools
step3 :新建一个visual studio 空项目。右击xxx项目的属性
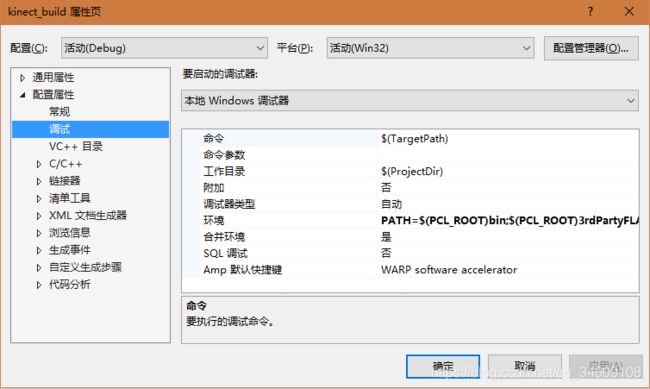
在调试下的,环境添加 : PATH=$(PCL_ROOT)bin;$(PCL_ROOT)3rdPartyFLANNbin;$(PCL_ROOT)3rdPartyVTKbin;$(PCL_ROOT)Qhullbin;$(PCL_ROOT)3rdPartyOpenNI2Tools;$(PATH)
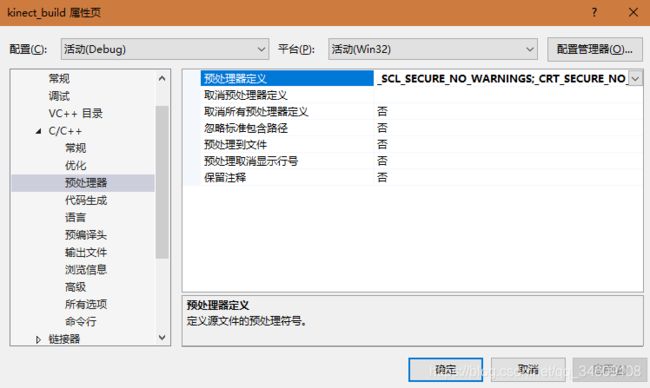
点击 c/c++ 下 预处理器添加 : _SCL_SECURE_NO_WARNINGS 和 _CRT_SECURE_NO_WARNINGS
step4 : 将下载属性表里的pclDebug.props和pclRelease.props 放在如下位置
点击vs项目的属性管理器 :
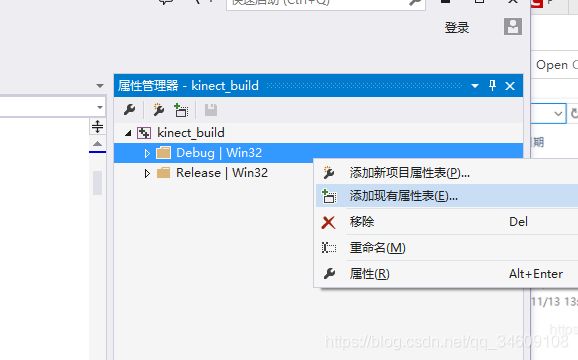
debug|win32右击,添加现有属性表:
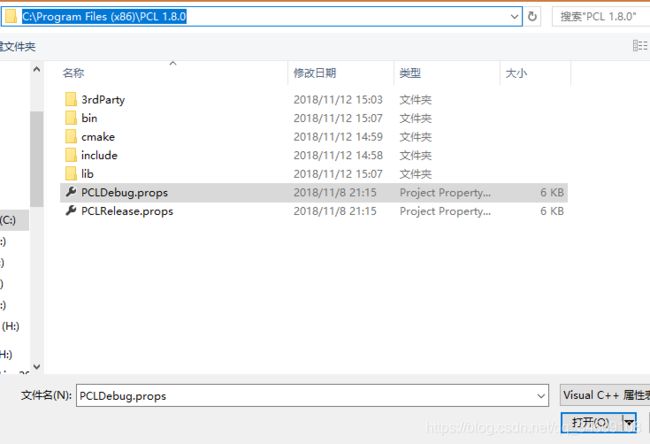
添加进去,同理添加pclRelease.props 到release|win32 下 :配置好如图 :
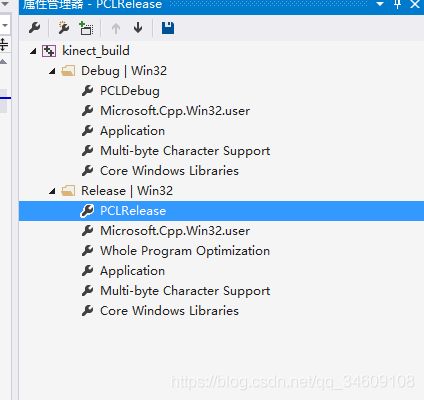
三 : 如上,pcl 32 位就配置好了, 如需64位差不多的操作,接下来验证一下,配置结果,解决资源方案管理器下新建一个main.cpp 复制如下代码 :
#include
#include
#include
#include
int user_data;
void viewerOneOff(pcl::visualization::PCLVisualizer& viewer)
{
viewer.setBackgroundColor(1.0, 0.5, 1.0);
pcl::PointXYZ o;
o.x = 1.0;
o.y = 0;
o.z = 0;
viewer.addSphere(o, 0.25, "sphere", 0);
std::cout << "i only run once" << std::endl;
}
void viewerPsycho(pcl::visualization::PCLVisualizer& viewer)
{
static unsigned count = 0;
std::stringstream ss;
ss << "Once per viewer loop: " << count++;
viewer.removeShape("text", 0);
viewer.addText(ss.str(), 200, 300, "text", 0);
//FIXME: possible race condition here:
user_data++;
}
int main()
{
pcl::PointCloud::Ptr cloud(new pcl::PointCloud);
pcl::io::loadPCDFile("example.pcd的位置", *cloud);
pcl::visualization::CloudViewer viewer("Cloud Viewer");
//blocks until the cloud is actually rendered
viewer.showCloud(cloud);
//use the following functions to get access to the underlying more advanced/powerful
//PCLVisualizer
//This will only get called once
viewer.runOnVisualizationThreadOnce(viewerOneOff);
//This will get called once per visualization iteration
viewer.runOnVisualizationThread(viewerPsycho);
while (!viewer.wasStopped())
{
//you can also do cool processing here
//FIXME: Note that this is running in a separate thread from viewerPsycho
//and you should guard against race conditions yourself...
user_data++;
}
return 0;
}
点击运行,得出如下效果;
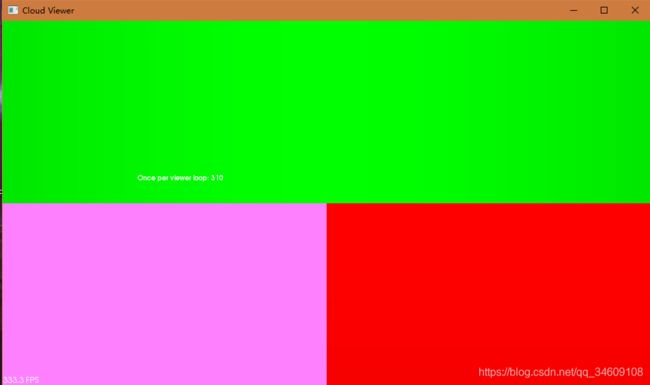
使用鼠标滚轮进行放大缩小可得 :

四 : opencv 2.4.9 安装配置,这个我写过博客,可去查看,也需要修改环境变量. 这里博主安装在了D盘 ;
环境变量:
![]()
下载安装 kinect v2 的sdk , 然后配置属性,vc++ 目录配置,包含目录下:
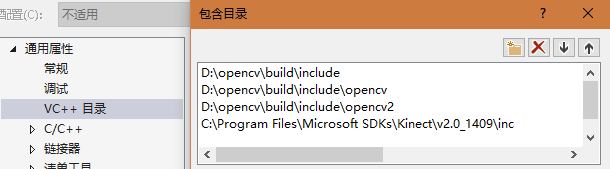
库目录下添加opencv 和 kinect 的库
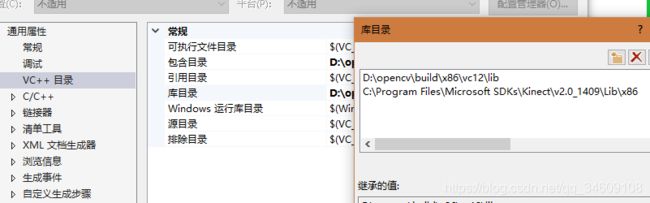
链接器输入下添加 :
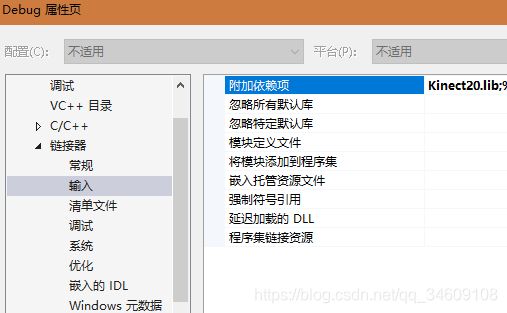
Kinect20.lib
opencv_ml249d.lib
opencv_calib3d249d.lib
opencv_contrib249d.lib
opencv_core249d.lib
opencv_features2d249d.lib
opencv_flann249d.lib
opencv_gpu249d.lib
opencv_highgui249d.lib
opencv_imgproc249d.lib
opencv_legacy249d.lib
opencv_objdetect249d.lib
opencv_ts249d.lib
opencv_video249d.lib
opencv_nonfree249d.lib
opencv_ocl249d.lib
opencv_photo249d.lib
opencv_stitching249d.lib
opencv_superres249d.lib
opencv_videostab249d.lib
opencv_objdetect249.lib
opencv_ts249.lib
opencv_video249.lib
opencv_nonfree249.lib
opencv_ocl249.lib
opencv_photo249.lib
opencv_stitching249.lib
opencv_superres249.lib
opencv_videostab249.lib
opencv_calib3d249.lib
opencv_contrib249.lib
opencv_core249.lib
opencv_features2d249.lib
opencv_flann249.lib
opencv_gpu249.lib
opencv_highgui249.lib
opencv_imgproc249.lib
opencv_legacy249.lib
opencv_ml249.lib
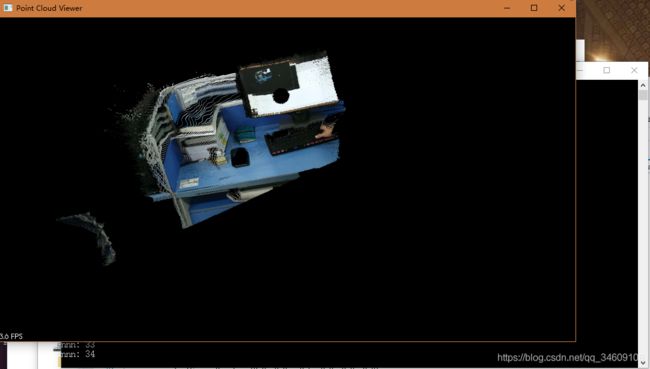
五 、 所以环境已经配好 ,现在开始Kinect V2 点云的获取与保存:
运行结果如图:
main.cpp
// Disable Error C4996 that occur when using Boost.Signals2.
#ifdef _DEBUG
#define _SCL_SECURE_NO_WARNINGS
#endif
#include "kinect_grabber.h"
#include
#include //PCL的PCD格式文件的输入输出头文件
#include //PCL对各种格式的点的支持头文件
#include
typedef pcl::PointXYZRGBA PointType;
int main(int argc, char* argv[])
{
int nnn = 0;
// PCL Visualizer
boost::shared_ptr viewer(
new pcl::visualization::PCLVisualizer("Point Cloud Viewer"));
viewer->setCameraPosition(0.0, 0.0, -2.5, 0.0, 0.0, 0.0);
// Point Cloud
pcl::PointCloud::ConstPtr cloud;
// Retrieved Point Cloud Callback Function
boost::mutex mutex;
boost::function::ConstPtr&)> function =
[&cloud, &mutex](const pcl::PointCloud::ConstPtr& ptr){
boost::mutex::scoped_lock lock(mutex);
/* Point Cloud Processing */
cloud = ptr->makeShared();
};
// Kinect2Grabber
boost::shared_ptr grabber = boost::make_shared();
// Register Callback Function
boost::signals2::connection connection = grabber->registerCallback(function);
// Start Grabber
grabber->start();
bool switchfd = true;
while (!viewer->wasStopped()){
// Update Viewer
viewer->spinOnce();
boost::mutex::scoped_try_lock lock(mutex);
if (lock.owns_lock() && cloud){
// Update Point Cloud
//cout << cloud->width << endl;
//cout << cloud->size() << endl;
//保存点云数据
if (nnn == 100)
{
cin >> nnn;
pcl::io::savePCDFileASCII("test_pcd.pcd", *cloud);
nnn = 0;
}
nnn++;
cout << "nnn: " << nnn << endl;
if (!viewer->updatePointCloud(cloud, "cloud")){
viewer->addPointCloud(cloud, "cloud");
}
}
}
// Stop Grabber
grabber->stop();
// Disconnect Callback Function
if (connection.connected()){
connection.disconnect();
}
return 0;
}
kinect_grabber.h
// Kinect2Grabber is pcl::Grabber to retrieve the point cloud data from Kinect v2 using Kinect for Windows SDK 2.x.
// This source code is licensed under the MIT license. Please see the License in License.txt.
#ifndef KINECT2_GRABBER
#define KINECT2_GRABBER
#define NOMINMAX
#include
#include
#include
#include
#include
#include
namespace pcl
{
struct pcl::PointXYZ;
struct pcl::PointXYZI;
struct pcl::PointXYZRGB;
struct pcl::PointXYZRGBA;
template class pcl::PointCloud;
template
inline void SafeRelease(Interface *& IRelease)
{
if (IRelease != NULL){
IRelease->Release();
IRelease = NULL;
}
}
class Kinect2Grabber : public pcl::Grabber
{
public:
Kinect2Grabber();
virtual ~Kinect2Grabber() throw ();
virtual void start();
virtual void stop();
virtual bool isRunning() const;
virtual std::string getName() const;
virtual float getFramesPerSecond() const;
typedef void (signal_Kinect2_PointXYZ)(const boost::shared_ptr>&);
typedef void (signal_Kinect2_PointXYZI)(const boost::shared_ptr>&);
typedef void (signal_Kinect2_PointXYZRGB)(const boost::shared_ptr>&);
typedef void (signal_Kinect2_PointXYZRGBA)(const boost::shared_ptr>&);
protected:
boost::signals2::signal* signal_PointXYZ;
boost::signals2::signal* signal_PointXYZI;
boost::signals2::signal* signal_PointXYZRGB;
boost::signals2::signal* signal_PointXYZRGBA;
pcl::PointCloud::Ptr convertDepthToPointXYZ(UINT16* depthBuffer);
pcl::PointCloud::Ptr convertInfraredDepthToPointXYZI(UINT16* infraredBuffer, UINT16* depthBuffer);
pcl::PointCloud::Ptr convertRGBDepthToPointXYZRGB(RGBQUAD* colorBuffer, UINT16* depthBuffer);
pcl::PointCloud::Ptr convertRGBADepthToPointXYZRGBA(RGBQUAD* colorBuffer, UINT16* depthBuffer);
boost::thread thread;
mutable boost::mutex mutex;
void threadFunction();
bool quit;
bool running;
HRESULT result;
IKinectSensor* sensor;
ICoordinateMapper* mapper;
IColorFrameSource* colorSource;
IColorFrameReader* colorReader;
IDepthFrameSource* depthSource;
IDepthFrameReader* depthReader;
IInfraredFrameSource* infraredSource;
IInfraredFrameReader* infraredReader;
int colorWidth;
int colorHeight;
std::vector colorBuffer;
int depthWidth;
int depthHeight;
std::vector depthBuffer;
int infraredWidth;
int infraredHeight;
std::vector infraredBuffer;
};
pcl::Kinect2Grabber::Kinect2Grabber()
: sensor(nullptr)
, mapper(nullptr)
, colorSource(nullptr)
, colorReader(nullptr)
, depthSource(nullptr)
, depthReader(nullptr)
, infraredSource(nullptr)
, infraredReader(nullptr)
, result(S_OK)
, colorWidth(1920)
, colorHeight(1080)
, colorBuffer()
, depthWidth(512)
, depthHeight(424)
, depthBuffer()
, infraredWidth(512)
, infraredHeight(424)
, infraredBuffer()
, running(false)
, quit(false)
, signal_PointXYZ(nullptr)
, signal_PointXYZI(nullptr)
, signal_PointXYZRGB(nullptr)
, signal_PointXYZRGBA(nullptr)
{
// Create Sensor Instance
result = GetDefaultKinectSensor(&sensor);
if (FAILED(result)){
throw std::exception("Exception : GetDefaultKinectSensor()");
}
// Open Sensor
result = sensor->Open();
if (FAILED(result)){
throw std::exception("Exception : IKinectSensor::Open()");
}
// Retrieved Coordinate Mapper
result = sensor->get_CoordinateMapper(&mapper);
if (FAILED(result)){
throw std::exception("Exception : IKinectSensor::get_CoordinateMapper()");
}
// Retrieved Color Frame Source
result = sensor->get_ColorFrameSource(&colorSource);
if (FAILED(result)){
throw std::exception("Exception : IKinectSensor::get_ColorFrameSource()");
}
// Retrieved Depth Frame Source
result = sensor->get_DepthFrameSource(&depthSource);
if (FAILED(result)){
throw std::exception("Exception : IKinectSensor::get_DepthFrameSource()");
}
// Retrieved Infrared Frame Source
result = sensor->get_InfraredFrameSource(&infraredSource);
if (FAILED(result)){
throw std::exception("Exception : IKinectSensor::get_InfraredFrameSource()");
}
// Retrieved Color Frame Size
IFrameDescription* colorDescription;
result = colorSource->get_FrameDescription(&colorDescription);
if (FAILED(result)){
throw std::exception("Exception : IColorFrameSource::get_FrameDescription()");
}
result = colorDescription->get_Width(&colorWidth); // 1920
if (FAILED(result)){
throw std::exception("Exception : IFrameDescription::get_Width()");
}
result = colorDescription->get_Height(&colorHeight); // 1080
if (FAILED(result)){
throw std::exception("Exception : IFrameDescription::get_Height()");
}
SafeRelease(colorDescription);
// To Reserve Color Frame Buffer
colorBuffer.resize(colorWidth * colorHeight);
// Retrieved Depth Frame Size
IFrameDescription* depthDescription;
result = depthSource->get_FrameDescription(&depthDescription);
if (FAILED(result)){
throw std::exception("Exception : IDepthFrameSource::get_FrameDescription()");
}
result = depthDescription->get_Width(&depthWidth); // 512
if (FAILED(result)){
throw std::exception("Exception : IFrameDescription::get_Width()");
}
result = depthDescription->get_Height(&depthHeight); // 424
if (FAILED(result)){
throw std::exception("Exception : IFrameDescription::get_Height()");
}
SafeRelease(depthDescription);
// To Reserve Depth Frame Buffer
depthBuffer.resize(depthWidth * depthHeight);
// Retrieved Infrared Frame Size
IFrameDescription* infraredDescription;
result = infraredSource->get_FrameDescription(&infraredDescription);
if (FAILED(result)){
throw std::exception("Exception : IInfraredFrameSource::get_FrameDescription()");
}
result = infraredDescription->get_Width(&infraredWidth); // 512
if (FAILED(result)){
throw std::exception("Exception : IFrameDescription::get_Width()");
}
result = infraredDescription->get_Height(&infraredHeight); // 424
if (FAILED(result)){
throw std::exception("Exception : IFrameDescription::get_Height()");
}
SafeRelease(infraredDescription);
// To Reserve Infrared Frame Buffer
infraredBuffer.resize(infraredWidth * infraredHeight);
signal_PointXYZ = createSignal();
signal_PointXYZI = createSignal();
signal_PointXYZRGB = createSignal();
signal_PointXYZRGBA = createSignal();
}
pcl::Kinect2Grabber::~Kinect2Grabber() throw()
{
stop();
disconnect_all_slots();
disconnect_all_slots();
disconnect_all_slots();
disconnect_all_slots();
thread.join();
// End Processing
if (sensor){
sensor->Close();
}
SafeRelease(sensor);
SafeRelease(mapper);
SafeRelease(colorSource);
SafeRelease(colorReader);
SafeRelease(depthSource);
SafeRelease(depthReader);
SafeRelease(infraredSource);
SafeRelease(infraredReader);
}
void pcl::Kinect2Grabber::start()
{
// Open Color Frame Reader
result = colorSource->OpenReader(&colorReader);
if (FAILED(result)){
throw std::exception("Exception : IColorFrameSource::OpenReader()");
}
// Open Depth Frame Reader
result = depthSource->OpenReader(&depthReader);
if (FAILED(result)){
throw std::exception("Exception : IDepthFrameSource::OpenReader()");
}
// Open Infrared Frame Reader
result = infraredSource->OpenReader(&infraredReader);
if (FAILED(result)){
throw std::exception("Exception : IInfraredFrameSource::OpenReader()");
}
running = true;
thread = boost::thread(&Kinect2Grabber::threadFunction, this);
}
void pcl::Kinect2Grabber::stop()
{
boost::unique_lock lock(mutex);
quit = true;
running = false;
lock.unlock();
}
bool pcl::Kinect2Grabber::isRunning() const
{
boost::unique_lock lock(mutex);
return running;
lock.unlock();
}
std::string pcl::Kinect2Grabber::getName() const
{
return std::string("Kinect2Grabber");
}
float pcl::Kinect2Grabber::getFramesPerSecond() const
{
return 30.0f;
}
void pcl::Kinect2Grabber::threadFunction()
{
while (!quit){
boost::unique_lock lock(mutex);
// Acquire Latest Color Frame
IColorFrame* colorFrame = nullptr;
result = colorReader->AcquireLatestFrame(&colorFrame);
if (SUCCEEDED(result)){
// Retrieved Color Data
result = colorFrame->CopyConvertedFrameDataToArray(colorBuffer.size() * sizeof(RGBQUAD), reinterpret_cast(&colorBuffer[0]), ColorImageFormat::ColorImageFormat_Bgra);
if (FAILED(result)){
throw std::exception("Exception : IColorFrame::CopyConvertedFrameDataToArray()");
}
}
SafeRelease(colorFrame);
// Acquire Latest Depth Frame
IDepthFrame* depthFrame = nullptr;
result = depthReader->AcquireLatestFrame(&depthFrame);
if (SUCCEEDED(result)){
// Retrieved Depth Data
result = depthFrame->CopyFrameDataToArray(depthBuffer.size(), &depthBuffer[0]);
if (FAILED(result)){
throw std::exception("Exception : IDepthFrame::CopyFrameDataToArray()");
}
}
SafeRelease(depthFrame);
// Acquire Latest Infrared Frame
IInfraredFrame* infraredFrame = nullptr;
result = infraredReader->AcquireLatestFrame(&infraredFrame);
if (SUCCEEDED(result)){
// Retrieved Infrared Data
result = infraredFrame->CopyFrameDataToArray(infraredBuffer.size(), &infraredBuffer[0]);
if (FAILED(result)){
throw std::exception("Exception : IInfraredFrame::CopyFrameDataToArray()");
}
}
SafeRelease(infraredFrame);
lock.unlock();
if (signal_PointXYZ->num_slots() > 0){
signal_PointXYZ->operator()(convertDepthToPointXYZ(&depthBuffer[0]));
}
if (signal_PointXYZI->num_slots() > 0){
signal_PointXYZI->operator()(convertInfraredDepthToPointXYZI(&infraredBuffer[0], &depthBuffer[0]));
}
if (signal_PointXYZRGB->num_slots() > 0){
signal_PointXYZRGB->operator()(convertRGBDepthToPointXYZRGB(&colorBuffer[0], &depthBuffer[0]));
}
if (signal_PointXYZRGBA->num_slots() > 0){
signal_PointXYZRGBA->operator()(convertRGBADepthToPointXYZRGBA(&colorBuffer[0], &depthBuffer[0]));
}
}
}
pcl::PointCloud::Ptr pcl::Kinect2Grabber::convertDepthToPointXYZ(UINT16* depthBuffer)
{
pcl::PointCloud::Ptr cloud(new pcl::PointCloud());
cloud->width = static_cast(depthWidth);
cloud->height = static_cast(depthHeight);
cloud->is_dense = false;
cloud->points.resize(cloud->height * cloud->width);
pcl::PointXYZ* pt = &cloud->points[0];
for (int y = 0; y < depthHeight; y++){
for (int x = 0; x < depthWidth; x++, pt++){
pcl::PointXYZ point;
DepthSpacePoint depthSpacePoint = { static_cast(x), static_cast(y) };
UINT16 depth = depthBuffer[y * depthWidth + x];
// Coordinate Mapping Depth to Camera Space, and Setting PointCloud XYZ
CameraSpacePoint cameraSpacePoint = { 0.0f, 0.0f, 0.0f };
mapper->MapDepthPointToCameraSpace(depthSpacePoint, depth, &cameraSpacePoint);
point.x = cameraSpacePoint.X;
point.y = cameraSpacePoint.Y;
point.z = cameraSpacePoint.Z;
*pt = point;
}
}
return cloud;
}
pcl::PointCloud::Ptr pcl::Kinect2Grabber::convertInfraredDepthToPointXYZI(UINT16* infraredBuffer, UINT16* depthBuffer)
{
pcl::PointCloud::Ptr cloud(new pcl::PointCloud());
cloud->width = static_cast(depthWidth);
cloud->height = static_cast(depthHeight);
cloud->is_dense = false;
cloud->points.resize(cloud->height * cloud->width);
pcl::PointXYZI* pt = &cloud->points[0];
for (int y = 0; y < depthHeight; y++){
for (int x = 0; x < depthWidth; x++, pt++){
pcl::PointXYZI point;
DepthSpacePoint depthSpacePoint = { static_cast(x), static_cast(y) };
UINT16 depth = depthBuffer[y * depthWidth + x];
// Setting PointCloud Intensity
point.intensity = static_cast(infraredBuffer[y * depthWidth + x]);
// Coordinate Mapping Depth to Camera Space, and Setting PointCloud XYZ
CameraSpacePoint cameraSpacePoint = { 0.0f, 0.0f, 0.0f };
mapper->MapDepthPointToCameraSpace(depthSpacePoint, depth, &cameraSpacePoint);
point.x = cameraSpacePoint.X;
point.y = cameraSpacePoint.Y;
point.z = cameraSpacePoint.Z;
*pt = point;
}
}
return cloud;
}
pcl::PointCloud::Ptr pcl::Kinect2Grabber::convertRGBDepthToPointXYZRGB(RGBQUAD* colorBuffer, UINT16* depthBuffer)
{
pcl::PointCloud::Ptr cloud(new pcl::PointCloud());
cloud->width = static_cast(depthWidth);
cloud->height = static_cast(depthHeight);
cloud->is_dense = false;
cloud->points.resize(cloud->height * cloud->width);
pcl::PointXYZRGB* pt = &cloud->points[0];
for (int y = 0; y < depthHeight; y++){
for (int x = 0; x < depthWidth; x++, pt++){
pcl::PointXYZRGB point;
DepthSpacePoint depthSpacePoint = { static_cast(x), static_cast(y) };
UINT16 depth = depthBuffer[y * depthWidth + x];
// Coordinate Mapping Depth to Color Space, and Setting PointCloud RGB
ColorSpacePoint colorSpacePoint = { 0.0f, 0.0f };
mapper->MapDepthPointToColorSpace(depthSpacePoint, depth, &colorSpacePoint);
int colorX = static_cast(std::floor(colorSpacePoint.X + 0.5f));
int colorY = static_cast(std::floor(colorSpacePoint.Y + 0.5f));
if ((0 <= colorX) && (colorX < colorWidth) && (0 <= colorY) && (colorY < colorHeight)){
RGBQUAD color = colorBuffer[colorY * colorWidth + colorX];
point.b = color.rgbBlue;
point.g = color.rgbGreen;
point.r = color.rgbRed;
}
// Coordinate Mapping Depth to Camera Space, and Setting PointCloud XYZ
CameraSpacePoint cameraSpacePoint = { 0.0f, 0.0f, 0.0f };
mapper->MapDepthPointToCameraSpace(depthSpacePoint, depth, &cameraSpacePoint);
if ((0 <= colorX) && (colorX < colorWidth) && (0 <= colorY) && (colorY < colorHeight)){
point.x = cameraSpacePoint.X;
point.y = cameraSpacePoint.Y;
point.z = cameraSpacePoint.Z;
}
*pt = point;
}
}
return cloud;
}
pcl::PointCloud::Ptr pcl::Kinect2Grabber::convertRGBADepthToPointXYZRGBA(RGBQUAD* colorBuffer, UINT16* depthBuffer)
{
pcl::PointCloud::Ptr cloud(new pcl::PointCloud());
cloud->width = static_cast(depthWidth);
cloud->height = static_cast(depthHeight);
cloud->is_dense = false;
cloud->points.resize(cloud->height * cloud->width);
pcl::PointXYZRGBA* pt = &cloud->points[0];
for (int y = 0; y < depthHeight; y++){
for (int x = 0; x < depthWidth; x++, pt++){
pcl::PointXYZRGBA point;
DepthSpacePoint depthSpacePoint = { static_cast(x), static_cast(y) };
UINT16 depth = depthBuffer[y * depthWidth + x];
// Coordinate Mapping Depth to Color Space, and Setting PointCloud RGBA
ColorSpacePoint colorSpacePoint = { 0.0f, 0.0f };
mapper->MapDepthPointToColorSpace(depthSpacePoint, depth, &colorSpacePoint);
int colorX = static_cast(std::floor(colorSpacePoint.X + 0.5f));
int colorY = static_cast(std::floor(colorSpacePoint.Y + 0.5f));
if ((0 <= colorX) && (colorX < colorWidth) && (0 <= colorY) && (colorY < colorHeight)){
RGBQUAD color = colorBuffer[colorY * colorWidth + colorX];
point.b = color.rgbBlue;
point.g = color.rgbGreen;
point.r = color.rgbRed;
point.a = color.rgbReserved;
}
// Coordinate Mapping Depth to Camera Space, and Setting PointCloud XYZ
CameraSpacePoint cameraSpacePoint = { 0.0f, 0.0f, 0.0f };
mapper->MapDepthPointToCameraSpace(depthSpacePoint, depth, &cameraSpacePoint);
if ((0 <= colorX) && (colorX < colorWidth) && (0 <= colorY) && (colorY < colorHeight)){
point.x = cameraSpacePoint.X;
point.y = cameraSpacePoint.Y;
point.z = cameraSpacePoint.Z;
}
*pt = point;
}
}
return cloud;
}
}
#endif KINECT2_GRABBER