Pangolin多视口显示——按钮面板,图片,三维点云
这篇博客记录:
- Pangolin的几类显示方法,包括按钮面板,彩色图片,三维点云(可变换视角)
- Pangolin显示cv::Mat格式图片的方法
- 原本倒置的图片自下而上渲染(变正:)
1.按钮面板
//新建按钮和选择框
pangolin::CreatePanel("按钮面板").SetBounds(0.0,1.0,0.0,0.2);
//第一个参数为按钮的名字,第二个为默认状态,第三个为是否有选择框
pangolin::Var<bool> menu("menu",true,true);其中函数SetBounds(pangolin::Attach bottom, pangolin::Attach top, pangolin::Attach left, pangolin::Attach right )定义面板的位置,其中的参数可以设定成如上0.0,1.0 等(0~1)的相对位置数值,也可以设定成绝对位置数值,例如:
SetBounds(0,1,0,pangolin::Attach::Pix(100)),
前两个参数(0.0, 1.0)表明面板纵向宽度和窗口大小相同
后两个参数(0 ,pangolin::Attach::Pix(100))表明右边横向100个像素所有部分用于显示按钮面板
2.点云窗口
// 定义相机投影模型:ProjectionMatrix(w, h, fu, fv, u0, v0, zNear, zFar)
// 定义观测方位向量:观测点位置:(mViewpointX mViewpointY mViewpointZ)
// 观测目标位置:(0, 0, 0)
// 观测的方位向量:(0.0,-1.0, 0.0)
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024,768,_ViewpointF,_ViewpointF,512,389,0.1,1000),
pangolin::ModelViewLookAt(_ViewpointX,_ViewpointY,_ViewpointZ, 0,0,0,0.0,-1.0, 0.0)
);
// 定义地图面板
// SetBound最后一个参数(-1024.0f/768.0f)为显示长宽比
pangolin::View& d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, 0.2, 1.0, -1024.0f/768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
//使该视口生效,并进行渲染
d_cam.Activate(s_cam);
DrawPointCloud();3.图片视口
//建立图片视口
pangolin::View& rgb_image = pangolin::Display("rgb")
.SetBounds(0,0.2,0.2,0.4,1024.0f/768.0f)
//图片纹理定义
pangolin::GlTexture imageTexture(640,480,GL_RGB,false,0,GL_BGR,GL_UNSIGNED_BYTE);
//加载图片
uchar* rgb;
imageTexture.Upload(rgb,GL_BGR,GL_UNSIGNED_BYTE);
//渲染
rgb_image.Activate();
glColor3f(1.0,1.0,1.0);
imageTexture.RenderToViewport();
不完整代码如下:
(由于是从我的函数中拉出来的,复制粘贴不一定能work)
#include "pangolin/pangolin.h"
int main()
{
pangolin::CreateWindowAndBind("Plane_Slam: Map Viewer",1024,768);
// 启动深度测试,OpenGL只绘制最前面的一层,绘制时检查当前像素前面是否有别的像素,如果别的像素挡住了它,那它就不会绘制
glEnable(GL_DEPTH_TEST);
// 在OpenGL中使用颜色混合
glEnable(GL_BLEND);
// 选择混合选项
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
//定义按钮面板
//新建按钮和选择框
pangolin::CreatePanel("menu").SetBounds(0.0,1.0,0.0,0.2);
//第一个参数为按钮的名字,第二个为默认状态,第三个为是否有选择框
pangolin::Var<bool> menu("menu.test",true,true);
// 定义相机投影模型:ProjectionMatrix(w, h, fu, fv, u0, v0, zNear, zFar)
// 定义观测方位向量:观测点位置:(mViewpointX mViewpointY mViewpointZ)
// 观测目标位置:(0, 0, 0)
// 观测的方位向量:(0.0,-1.0, 0.0)
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024,768,_ViewpointF,_ViewpointF,512,389,0.1,1000),
pangolin::ModelViewLookAt(_ViewpointX,_ViewpointY,_ViewpointZ, 0,0,0,0.0,-1.0, 0.0)
);
// 定义地图面板
// 前两个参数(0.0, 1.0)表明宽度和面板纵向宽度和窗口大小相同
// 中间两个参数(pangolin::Attach::Pix(175), 1.0)表明右边所有部分用于显示图形
// 最后一个参数(-1024.0f/768.0f)为显示长宽比
pangolin::View& d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, 0.2, 1.0, -1024.0f/768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
pangolin::OpenGlMatrix Twc;
Twc.SetIdentity();
//定义图片面板
pangolin::View& rgb_image = pangolin::Display("rgb")
.SetBounds(0,0.2,0.2,0.4,1024.0f/768.0f)
.SetLock(pangolin::LockLeft, pangolin::LockBottom);
pangolin::View& depth_image = pangolin::Display("depth")
.SetBounds(0,0.2,0.4,0.6,1024.0f/768.0f)
.SetLock(pangolin::LockLeft, pangolin::LockBottom);
//初始化
pangolin::GlTexture imageTexture(640,480,GL_RGB,false,0,GL_BGR,GL_UNSIGNED_BYTE);
// cv::namedWindow("Plane_Slam: rgb");
// cv::namedWindow("Plane_Slam: depth");
bool Follow = true;
// bool LocalizationMode = false;
while(1)
{
// 清除缓冲区中的当前可写的颜色缓冲 和 深度缓冲
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
// 设置为白色,glClearColor(red, green, blue, alpha),数值范围(0, 1)
glClearColor(1.0f,1.0f,1.0f,1.0f);
//画出点云地图
//_MapDrawer->DrawPointCloud();
//cv::Mat 格式读取并显示RGB图片
cv::Mat rgb;
//_FrameDrawer->DrawFrame(rgb);
imageTexture.Upload(rgb.data,GL_BGR,GL_UNSIGNED_BYTE);
//display the image
rgb_image.Activate();
glColor3f(1.0,1.0,1.0);
imageTexture.RenderToViewportFlipY();
//注意,这里由于Upload函数无法将cv::Mat格式的图片数据作为输入,因此使用opencv的data函数将Mat格式的数据变为uchar格式,但是opencv中Mat存储图片是自下而上的,单纯的渲染所渲染出来的图片是倒置的,因此需使用RenderToViewportFlipY()函数进行渲染,将原本上下倒置的图片进行自下而上渲染,使显示的图片是正的。
pangolin::FinishFrame();
}
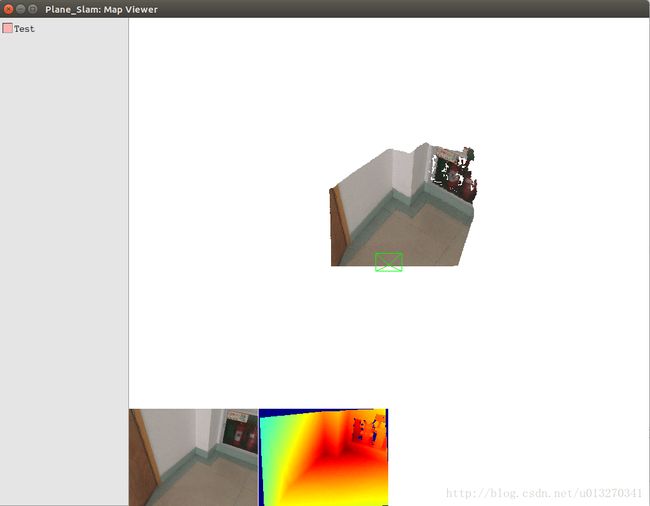
}最终显示的大致效果图: