概率机器人_阅读3_c6感知概率模型
REF:
书本教材:http://probabilistic-robotics.informatik.uni-freiburg.de/ppt/
读书笔记:https://blog.csdn.net/daqianc/article/category/8250671
Abbr:
 TBD
TBD
 牢记
牢记
 重点
重点
感知:(中文版page130,英文P149)
所有测量值都是不准确的。所有测量都是独立的,互不影响(独立事件)
![]()
地图的定义:
物理世界数字化表示就是地图,是信息的集合(想想家里的纸质地图)里面包含了各种信息(坐标,河流,树木,大小...)
地图通常基于以下两种方法之一,称为基于特征的 (feature- based) 和基于位置的 (location- based) 。
一种基于位置的经典的地图表示法称为占用栅格地图 (occupancy grid map) ,占用栅格地图为每一个x-y (不管有没有障碍物,没有障碍物)坐标分配一个二值占用值,指明一个位置是否被一个对象占用。占用栅格地图对移动机器人导航是非常重要的,它们使通过非占用空间寻找路径变得更容易。--路径规划特别方便
基于特征的,没有物体空间的是不表示的。
传感器噪声模型: Lidar, radar,ultrasonic(超声波)
第一种模型:波束模型(beam-based model)--这种模型需要进行最大似然估计,求导,估计的准确性不好 。而且估计的过程需要投影操作获得真值(复杂度太高)
描述了如何给测距的传感器建立噪声模型。有4种不确定/噪声的来源。-a,理解没问题,b-比如雷达的鬼影。混合后的到的模型图如下
Zt ---测量值,
Xt ---ego 坐标,m---(地图-就是物理世界,真值)
Zt* ---真值!



2维概率模型 理解图:(后验概率,已知地图的真值坐标--通过匹配,求测量结果发生的概率。)参数可以调整,概率模型已知,这样就可以估计测量结果的概率分布。
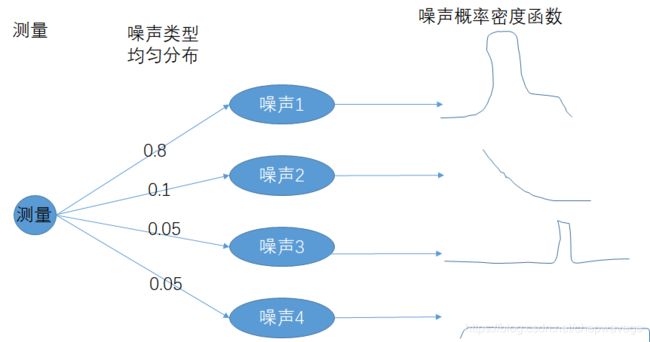
实现算法:zt* 在概率密度函数里有,需要先求出来,通过投影,特征匹配的方式,获得真值 ![]()

第二种模型:Scan-based model ==似然域 likehood field (中文page 145)
和beam based(基于波束的区别)•Idea: Instead of following along the beam, just check the end point.(扫描的方式只考虑起点和终点)
第三种模型:Correlation-based model 相关性的模型(中文page149)
Scan match: 扫描匹配:本地生成的地图,和全局已知的地图比较。实现定位。
第四种模型:feature -based model (中文page151)
前面的模型用的都是raw data, (数据信息量大,维度高),如果只提取出我们感兴趣的N维信息,就可以大大减少软件复杂度。
特征提取,特征分析。-运用computer vision的计算。<目前应该是主流应用了, 比如baidu apollo>。但是书中说。。。*大多数state-of-the-art的方法都使用稠密的测量数据 ,不使用特征法![]()
缺点: 适合特征明显的地域,城市内部,地下车库.几何棱角分明的建筑,不适用于开旷的,乡村 etc.
地标landmark==地图:(真值的测量与描述)--是一种基于特征值的地图,这些地图由特征列表组成, m= m1, m2,...组成。每个特征都具有一个签名(单个数或多维向量--数据特征--数据结构),和一个位置坐标 (location coordinate) 。用 mi,x 和 m,,y 表示的特征的位置是其在地图的全局坐标系下的坐标。

数据关联(测量数据和地图数据关联-data association)。
如果测量的特征都被地图<=N包含了,这个时候,特征提取,特征比较,得到了测量的真值后,可以建立他们的概率模型。
easy!

